前言:
看到有博客通过串口添加自定义传感器,按照步骤做了一遍
博客:http://blog.csdn.net/msq19895070/article/details/52012190
一 串口选择
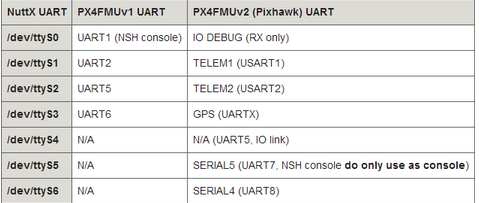
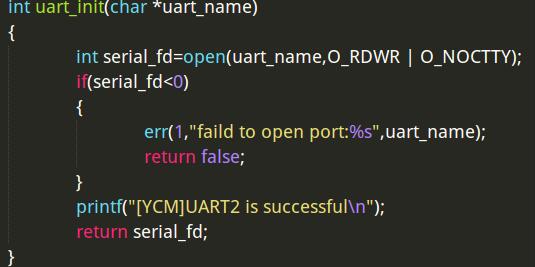
Pixhawk板上TELEM2接口的USART2,对应的Nuttx UART设备文件尾/dev/ttyS2
二 添加应用
step 1:在Firmware/src/modules中添加一个新的文件夹,命名为rw_uart
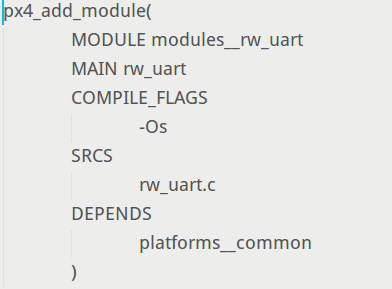
step 2:在rw_uart文件夹中创建CMakeLists.txt文件,作为cmake的编译脚本
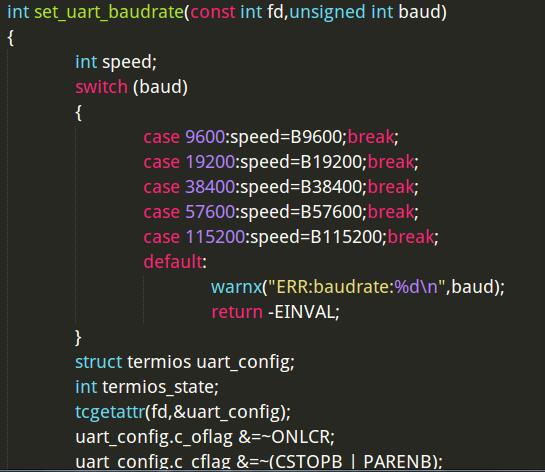
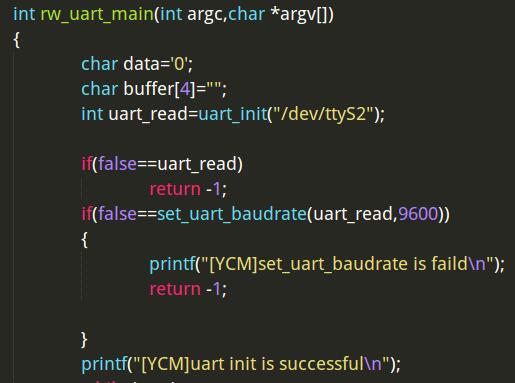
step 3:在rw_uart文件夹中创建rw_uart.c文件

step 4:注册新添加的应用到NuttShell中。/src/Firmware/cmake/configs/nuttx_px4fmu-v2_default.cmake文件中添加如下内容

step 5:编译固件
若遇到编译问题,可查看错误提示查找相关位置,应该是c文件输入有错,如:提示是在13行9列的地方,小三角标注的地方。

step 6:烧写后,进入nsh,并启动该应用。


三 读取数据测试
博客中提到的用超声波模块测试,手头没有,通过串口助手自动发送数据,看是否能读取到数据
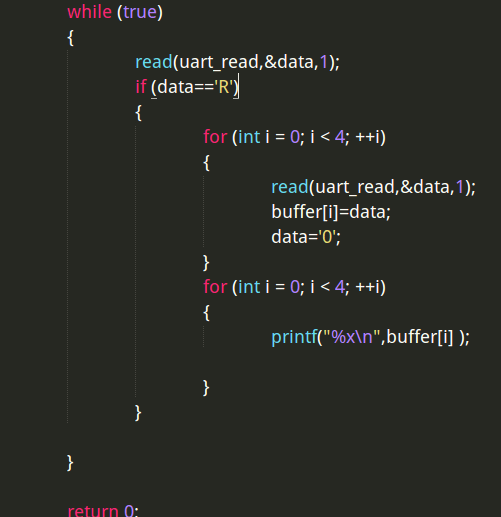
数据要求R开头,如:R0012 R0023 R0045
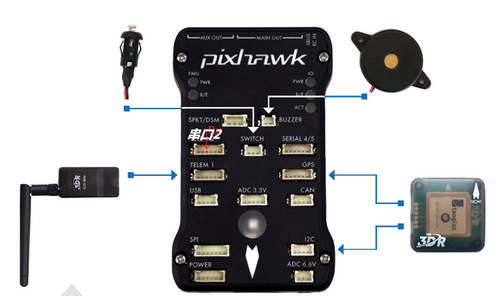
step1:用6针排座插在串口2上(TELEM2)上,用ch340转串模块连接串口助手
step2:将串口2的rx,gnd与ch340的tx,gnd连接,打开串口助手.
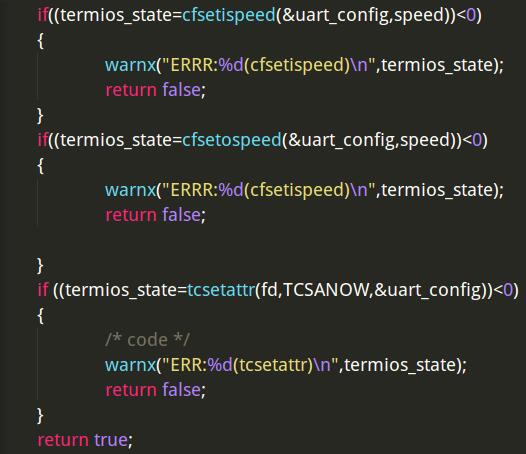
step:波特率(9600),发送数据R0012 R0023 R0045,手动发送
结果:

总结:
目前尝试串口读取,做过测试, 如果读取一个字节,串口助手发送一个字节,会导致第一次发送的字节读取不到,并且write出去串口助手显示的字节乱码,串口这块还有很多问题,包括数据包的解析,都是需要继续尝试的。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)