硬件相关
芯片介绍
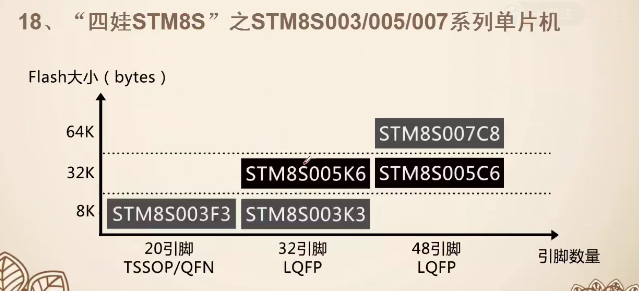
型号:STM8S003F3P6,用的不是ARM内核(STM32用的是ARM),而是意法半导体自己生产的高性能8位内核:
STM8AF 主要针对汽车电子应用,如:雨刷、车窗关闭控制机构STM8AL 适用于绿色能源作为供能的汽车电子STM8L 可以满足低功耗与便携设备要求STM8S 主要用于消费及工业控制领域STM8T 基于ProxSense技术可以用在电容接近、触摸识别产品中
003/005/007:都是基础型、入门型
stm8意味着是8位系统:则 long 是4字节,int 是2字节
板上硬件图

技术参数如下:
- 频率:
16 MHz - 电源电压(DC):
2.95V (min) - 工作电压:
2.95V ~ 5.5V - 针脚数:
20 - 时钟频率:
16.0 MHz - RAM大小:
1 KB - 位数:
8 - 耗散功率:
238 mW - FLASH内存容量:
8 KB - 模数转换数(ADC):
1 - 输入/输出(I/O)数:
16 Input - 工作温度(Max):
85 ℃ - 工作温度(Min):
-40 ℃ - 封装:
TSSOP-20
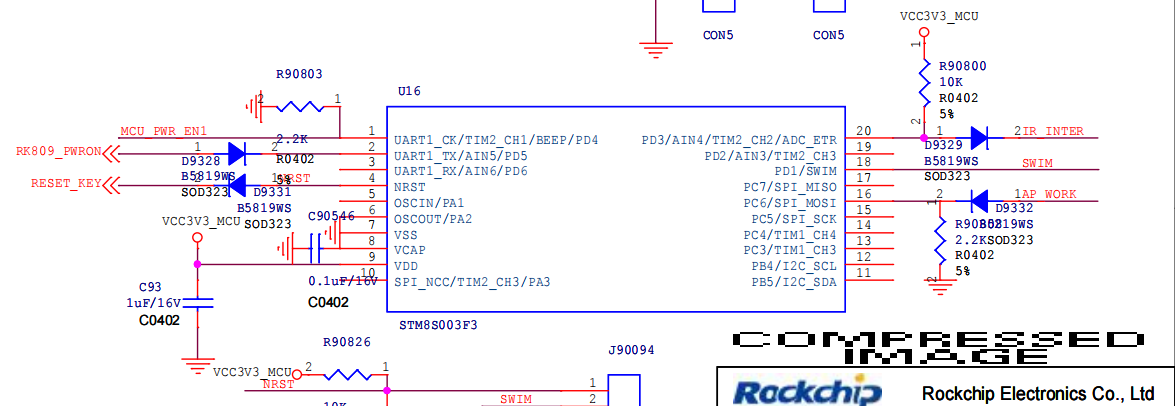
硬件原理图
IR_INTER:红外线(IR:Infrared Radiation)SWIM:SWIM引脚为开漏(OD)结构,以此实现双向通信。在NRST复位后,SWIM脚复位进入OFF 状态,此时不能使用此脚为普通 I/O 。通过软件配置可将 SWIM 脚设置为普通 I/O ,使用为普通 I/O 时可能会有较多限制,复位以后将恢复为OFF 状态AP_WORK:无线访问接入点(WAP:WirelessAccessPoint)MCU_PWR_EN1:电源使能RK809_PWRON:电源开(PWRON:Power On)NRST:NRST 引脚产生复位。当 NRST 为低电平时,MCU处于复位状态,重设所有的内部寄存器。
软件相关
软件开发环境
软件开发环境的作用是编写程序、调试软件功能、下载固件到单片机中。
STM8系列一般有 IAR 或者 STVD (ST Visual Develop) 这两个IDE(集成开发环境)选择:
IAR :内部集成了 C/C++编译器 和 调试工具链STVD:本身只能够用汇编进行编程,若要使用C进行编程,需要另外下载一个C编译器Cosmic
烧录工具的选择
(其实 IAR 既能编程也能烧录)
STVP:ST Visual Programmer,即ST的一套可视化编程工具。STVP 提供了一个面向ST单片机的Flash全功能烧写环境,可方便地用于读取、写入和校验芯片内部存储器与选项字节,作用总结如下:
STVP 软件可以将固件程序下载到单片机的 FLASH 存储器中- 可以修改STM8系列单片机
EEPROM 存储器中的内容 - 可以修改STM8系列单片机的选项字节
options bios 参数
ST官网STVP下载
下载 STVP-STM8 和 STVP-LIB-STM8(这个应该是单独源代码库),下载 STVP-STM8 后进行安装时,会自动安装 stvd 和 stvp 这两个工具,安装过程中也会自动安装 ST-Link 驱动。
下载器工具的选择
STM8需要 ST-Link 下载器,也是 仿真器 Debugger,虽然软件开发平台在进行编译时,能够指出语法上的错误,但逻辑上的错误却很难指出。这时,仿真器(专指硬件仿真器,下同)就派上用场了。它可用于实现硬件的仿真,可以实现对单片机程序运行的控制,例如单步执行、全速运行、设置断点,可以辅助查找程序中的问题。下图便是ST-LINK V2,中间的4P插针用于STM8硬件仿真,插针顺序(从左向右):目标的 TVCC、SWIM、GND、RESET。

TVCC:目标MCU的电源,这里不能为目标版供电(3.3V或5V可选?)SWIM:目标版SWIM引脚PD1GND:目标板GND(VSS)RESET:目标板NRST引脚1
ST-LINK的 SWIM 和 RST 与单片机芯片的 SWIM 和 RST 引脚相连后,即可对单片机进行调试和编程操作。
注意:STM32用到的是 NRST / SWDIO / SWCLK 这几个引脚进行的ST-Link调试,而STM8用到的是RESET / SWIM 这些引脚。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)