实际变成操作中,需要对ardupilot代码进行修改并添加对应的调试参数,这样,可以通过地面站很方便的进行修改参数。
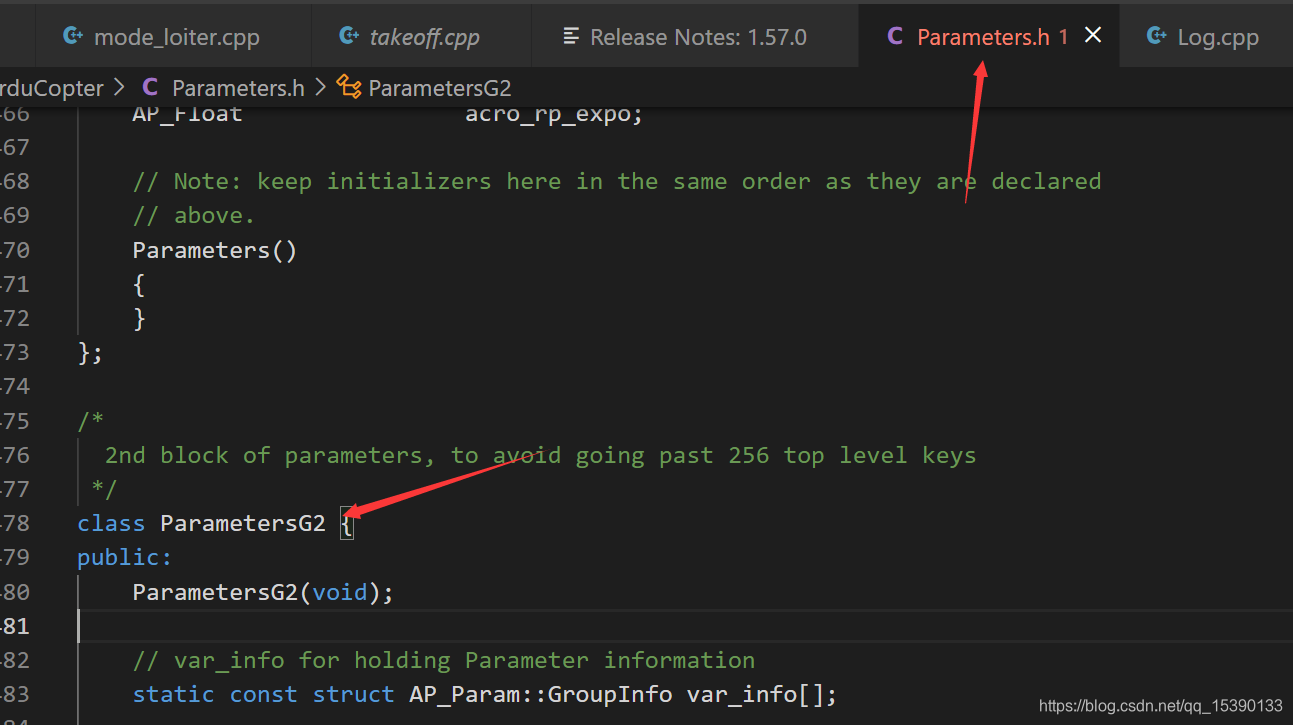
目前修改代码在parameter.h中的G2类,表示为全局的参数列表。
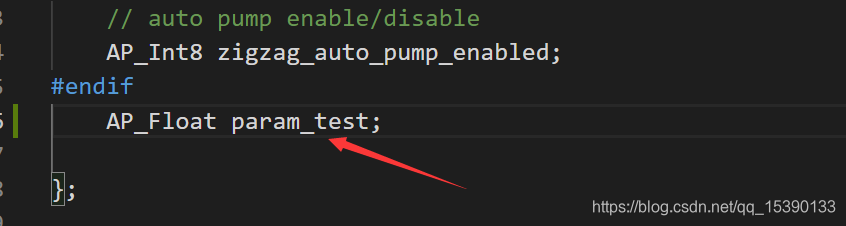
参数类型需要是以下几种
AP_PARAMDEF(float, Float, AP_PARAM_FLOAT);
AP_PARAMDEF(int8_t, Int8, AP_PARAM_INT8);
AP_PARAMDEF(int16_t, Int16, AP_PARAM_INT16);
AP_PARAMDEF(int32_t, Int32, AP_PARAM_INT32);
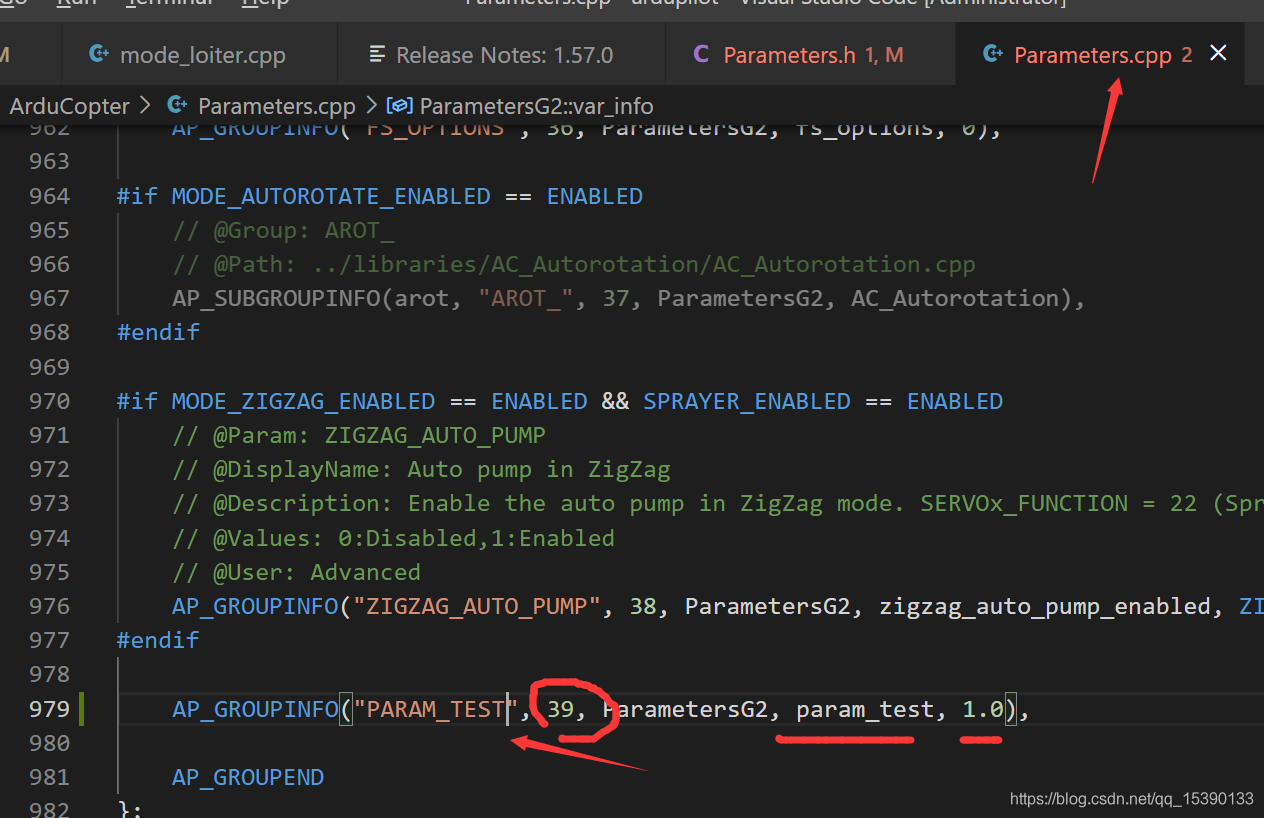
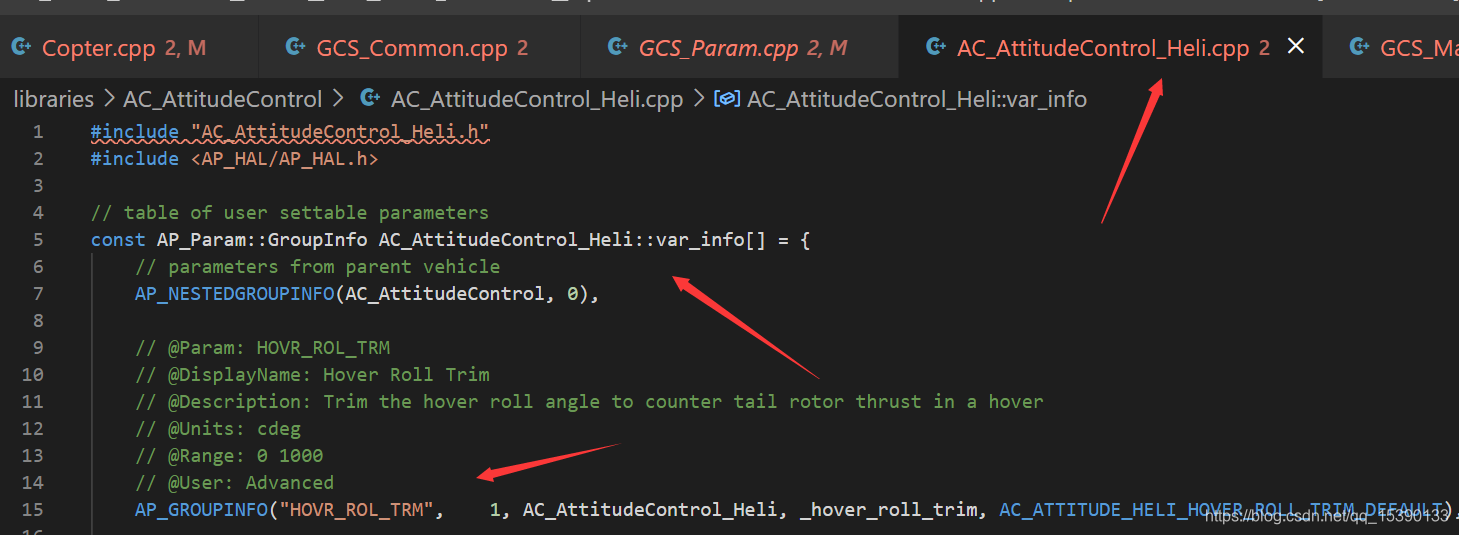
然后在对应的cpp文件中,g2中添加对应的groupinfo, 如下图所示。其中第一个参数为地面站显示的名称,第二个参数为序号,需要依次排列下来,第三个参数为类名称,这里为全局的parametersG2, 第四个为变量的名称,第五个参数为默认的参数值。
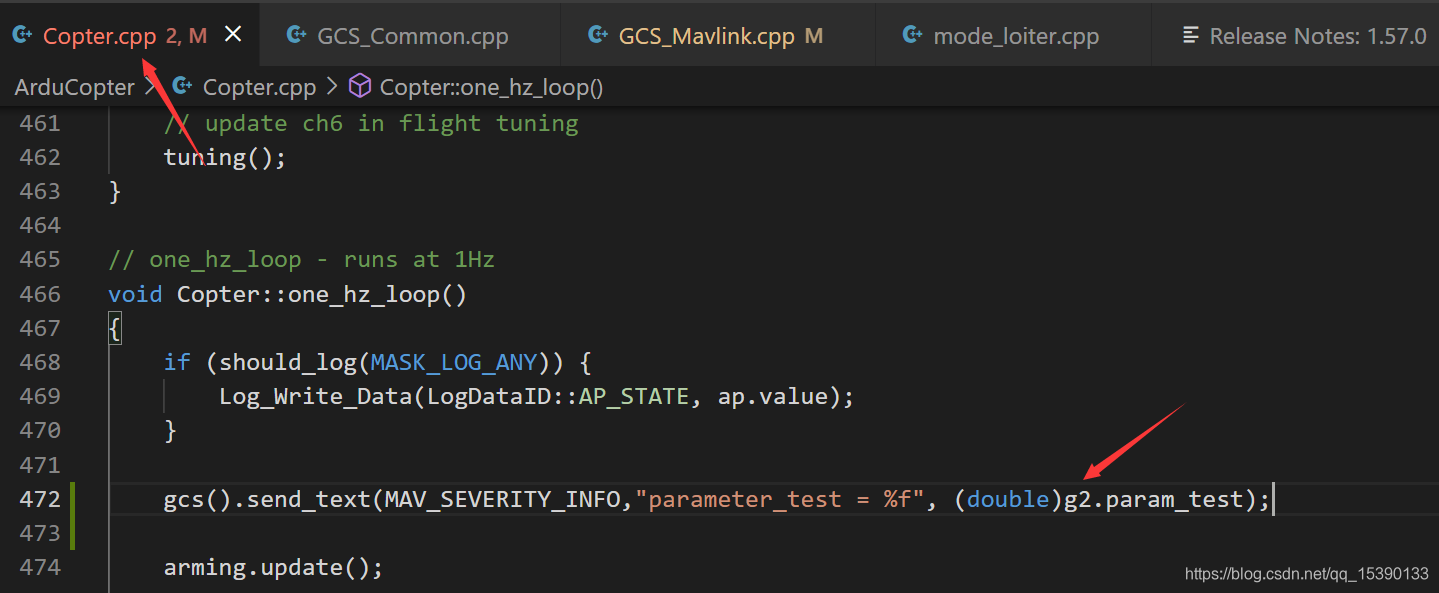
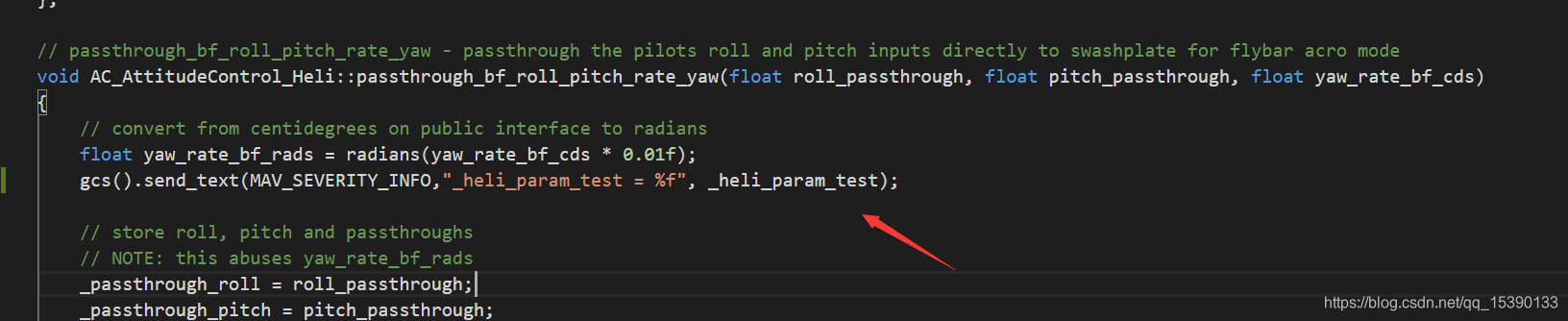
这样,该参数就可以在copter.cpp中进行赋值和修改了,如下图所示
对参数的读取部分,个人猜测是在ardupilot中,参数的设定在gcs_mavlink.cpp中handle_common_message(msg)函数中,-> handle_common_param_message(msg); 进去之后,会有message_set, message_read, list等参数
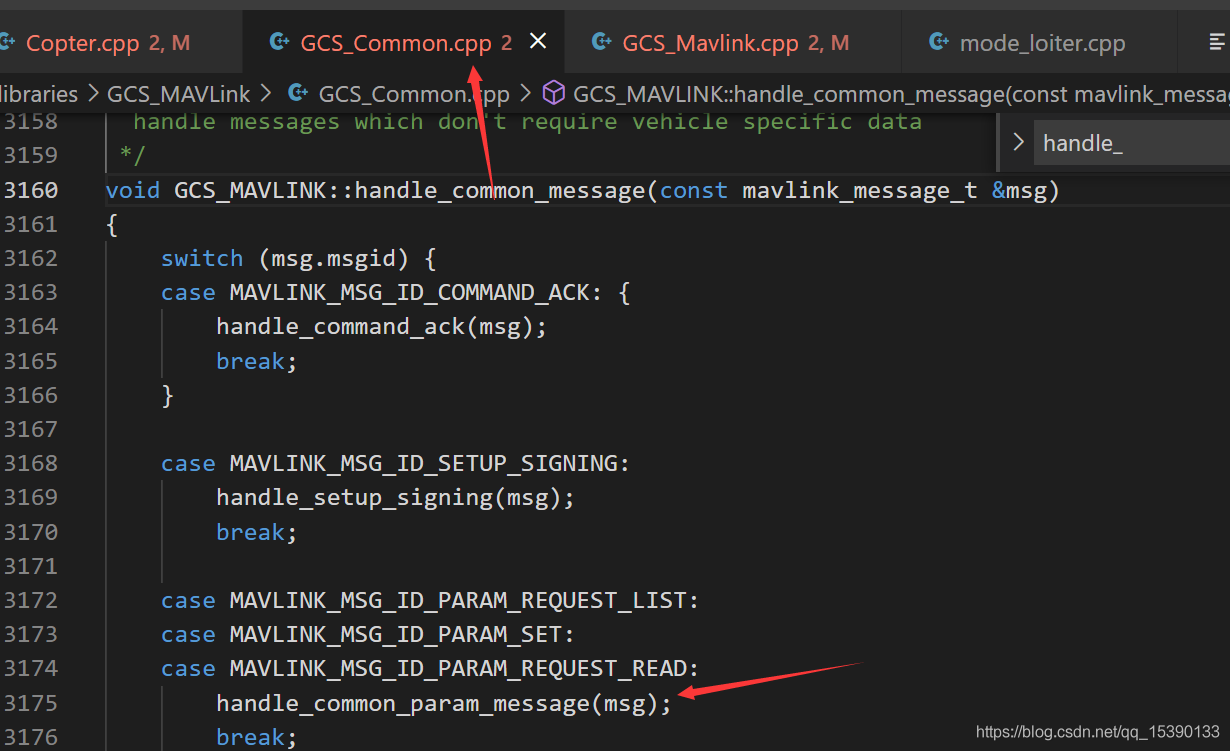
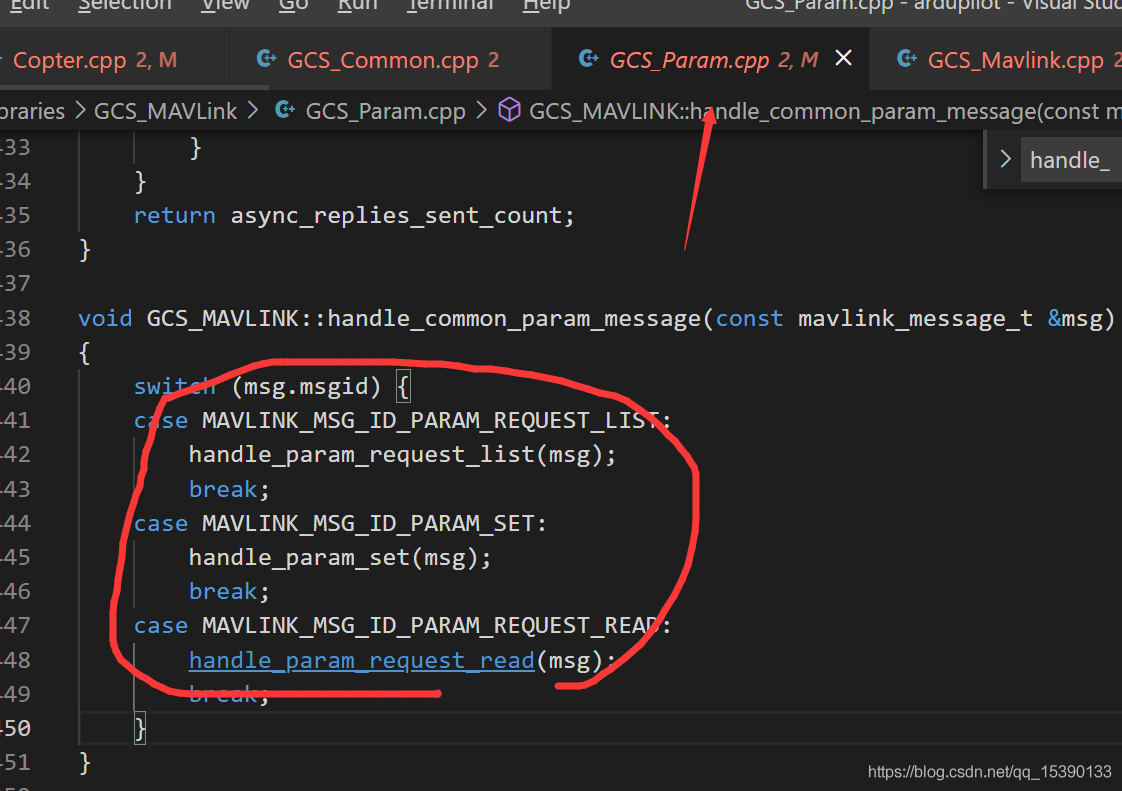
由于此处一般不需要进行修改,故不再进行展开操作。
但是上述操作是在copter对象中,如果对其他对象进行操作,则需要转到对应的参数表中完成。
如下图所示情况,是针对直升机的对象,又有一个参数表。
那么其修改方式,和上面的类似,是在类的私有变量中进行修改,跳转过去即可发现
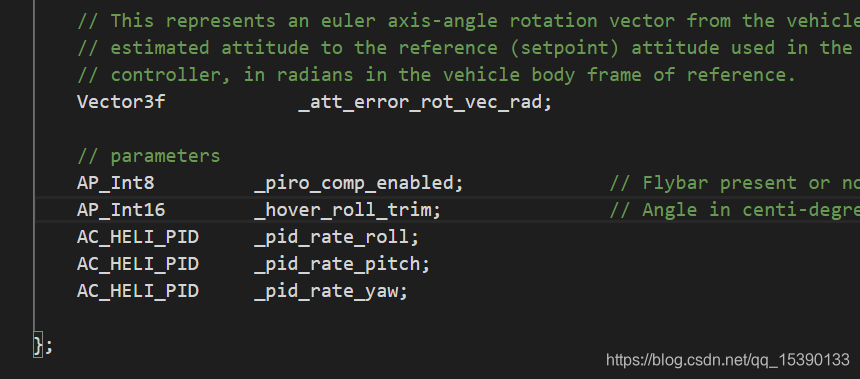
当然,这种情况的调用方式,是在该类下的公有函数中可以直接调用。
经过尝试,如果变量是定义在全局g2上的,通过指针,或者引用的方式,无法正常传递给其他类函数中的局部变量。其指针对应的地址会进行部分的改变(有人说是数据类型强制转换的锅)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)