上一篇笔记 https://blog.csdn.net/qq_24182661 记录的是第一篇论文2015 Continuum Robots for Medical Applications A survey的论文笔记,主要做的笔记是文章前面对于以往continuum robot的一些总结的笔记,然后就看了一篇关于建模分析的论文Neuro-Adaptive Observer based Control of Flexible joint robot主要是在Flexible robot物理模型上利用RBF神经网络逼近位置函数建立自适应控制系统控制模型。
这篇记笔的原因
这篇文章主要记录就是第二篇论文的笔记,主要是对Flexible robot和continuum robot模型建立的区别和共通点分析笔记
GO
想说一下Flexible robot(柔性机器人)和continuum robot(连续体机器人)之间的区别
两种机器人模型,在体积上是由一定的区别的,Flexible robot可以做的很大,现在已经有研究协作机器人应用柔性机器人,柔性机器人的特点就在于它的灵活性,可以通过改变形态来完成任务,在结构上柔性机器人是一个完整连续的结构,体积可以做的大,像达芬奇医疗机器人系统,人体外部辅助机器人属于柔性机器人,还有一些类肌腱的水下机器人也是柔性机器人,主要是他们的材料还有结构上是比较特殊。
相对来说,continuum robot的体积在我的意识里是要小的,因为大了的话有类 i-snake robot,snake robot可以相对于continuum robot更加灵活和容易控制,continuum robot如果单单用外部控制的话(具体continuum robot在上一篇笔记中有介绍)会出现控制难度大的情况,但是体积可以做到伸入以及深入人体,这样可以减少在人体上开大刀的伤害。结构上,continuum robot是一种类机械臂的joint连接起来,但是每个joint之间是没有电机驱动的,实现类无穷多自由度的情况,利用机器人学的知识就可以建立几何模型来达到指定目标。
在读第二篇论文的时候,主要是在看完之后发现其结构不同于continuum robot,但是有类似刚体机械臂,所以Flexible robot可以通过刚体机械臂的受力模型来类比出Flexible robot的关节传动模型,论文中的具体传动模型如下

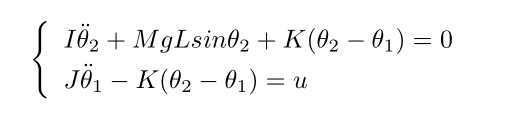
具体的数学模型构建我还没看的很懂,如果有哪个大神看懂了,请与我讨论一下!!!!!!
论文然后就是控制系统模型的推导,论文利用的是李雅普诺夫稳定判据来做模型收敛,收敛的值相对梯度下降方法会更有意义
论文选用RBF神经网络来做模型函数的逼近,主要是模型物理分析困难,会出现许多不可测量的参数,采用神经网络来逼近未知函数也是一个现在很多系统给研究上会使用的方法。
RBF神经网络直接鲁棒性系统仿真
论文采用的是两次RBF神经网络逼近的方法来逼近系统位置函数,参数以及推导式过多…我还没有完全看完,所以模型的复现还没有真的建立。。。在这里只做相关基础开源MATLAB模型的学习分析和笔记。
我利用的是上一次RBF神经网络模型仿真的后面的延申,这次主要是在直接鲁棒性上的系统仿真
主要的代码以及注释在这里
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)