宾夕法尼亚大学kumar实验室2018年发布《Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight 》,基于MSCKF基础上实现双目视觉惯导里程计。刚好这篇很新颖,又是双目,我这个方向深入了解进去才知道真JB难啊,自己写程序简直就是异想天开,我就想那来跑跑看老外写的这些高深莫测的开源到底能不能跑,这也决定了我毕设能不能po出来成果图啊。
于是乎我又踏上了配置环境的漫漫长路 ,这学期为了opencv这个小婊子真是没少费我的时间。这次整整三天时间,全都用来为编译这个文件准备环境,不攻克这个难关就仿佛一口淤血卡在我的肺部。接下来便是修行之路了,特别在此感谢苗哥一路为我找错误,最后还贡献出了自己的主机
,这学期为了opencv这个小婊子真是没少费我的时间。这次整整三天时间,全都用来为编译这个文件准备环境,不攻克这个难关就仿佛一口淤血卡在我的肺部。接下来便是修行之路了,特别在此感谢苗哥一路为我找错误,最后还贡献出了自己的主机
先不说后面的,我第一个大错特错就是我没有和作者用同样的系统,
The software is tested on Ubuntu 16.04 with ROS Kinetic.

而我,是18.04和ROS melodic。这基本就奠定了失败,而单纯可爱天真的我,以为前方就是光明大道,未曾想还没出发就已经注定了失败 初生牛犊不怕虎来吧,继续接下来的配置。前两天的工作不说了,都是没有用的,直接说我换了苗哥的主机重新下载了系统之后的工作吧!
初生牛犊不怕虎来吧,继续接下来的配置。前两天的工作不说了,都是没有用的,直接说我换了苗哥的主机重新下载了系统之后的工作吧!
1.第一呢,配置个opencv,打这句话的时候我整个人内心一万头。。。opencv啊!不知道安装过多少次了,linux下的,windows下的,带contrib的链接c++的,链接python的,能做的基本都来一遍了,以后谁找我配置!30块钱一位!感觉可以去万能的淘宝开个店,专门配置opencv了,linux下配置opencv讲良心是比较容易的。直接按着官网来就ok
2.照着十四讲把Eigen库配置上了
3.完全忘记第一次配置boost是什么过程了,这次很混乱,有些语句是需要自己理解的,大概是按照这篇博文做的https://www.cnblogs.com/findumars/p/6253092.html
4.ROS 基本是按着这个博客照做的,ROS其实不难https://blog.csdn.net/softimite_zifeng/article/details/78632211
5.建立一个ROS工作区,作者把他这个开源叫做PACKAGE,在ROS系统范畴内应该译作--功能包,对就是功能包,把这个功能包复制到catkin/src文件夹下,我们得catkin_make一下,下面这张图创建--初始化--编译都详细写了。
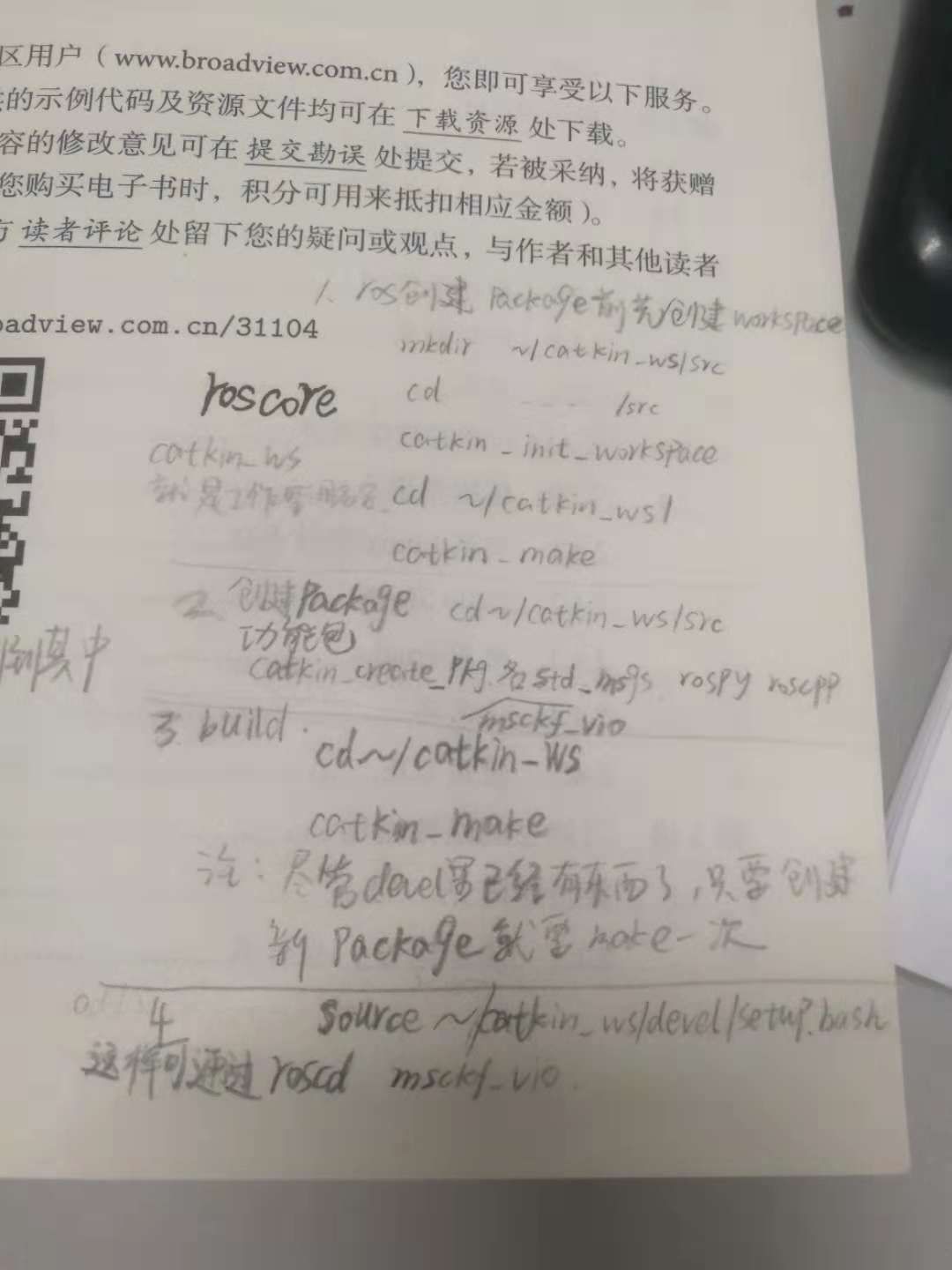
6.到了编译了,这句话是很重要的,把ROS工作空间添加到ROS路径上,我第一次都没有做

具体做法

一旦添加成功,再次查看路径的时候就会有两个了,中间以:分隔开。
以上一系列配置工作,都是本小主亲身光脚踩过的坑啊,每一步都抓耳挠腮、痛不欲生
到这里,就可以执行编译了,就按着readme给的就ok,这次可能是系统一致没有在编译过程中出现错误,真的 我输入编译那条命令的时候,我整个人都凉下来了,非常害怕再出错,好在好在 可能是看我太辛苦了,放我一马,一次成功。明天该加上数据试试了,希望顺利。
注:用我的电脑的时候,一只参考一个人的分享过程,全网只有这个人分享了博客,很感谢。https://blog.csdn.net/amazingren/article/details/82381801
我很希望有同方向的小伙伴一起讨论,可以关注公众号:老鹿蹒跚磕盐,是我个人记录学习用的,留言给我,我们一起学习进步吧
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)