陈苏的最优控制 https://www.wendangwang.com/doc/1b3fea9be6dd6e50a295238b/3 文章是对陈苏的最优控制PPT的原理部分进行的简单总结,若文中存在错误,请友友们批评指正,感谢!
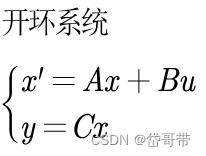
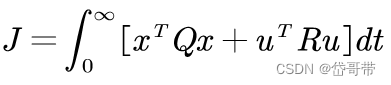
LQR(linear quadratic regulator):线性二次型控制器 对象:现代控制理论中以状态空间形式给出的线性系统。 目标函数:对象状态和控制输入的二次型函数 特点:主要用于线性系统的控制,其可损耗较小代价将非平衡状态分量调整至平衡状态,线性系统一般由状态空间方程表示,性能指标由二次型函数表示。 LQR控制器可通过Riccati(黎卡提)微分方程求得,其根据线性系统的状态方程和性能指标得到线性反馈的最优控制律,从而得到最优的控制量输入。 Riccati(黎卡提)微分方程形如
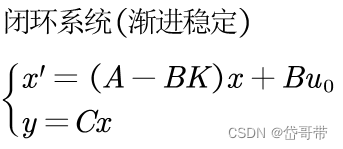
LQR最优设计是指设计出的状态反馈控制器使二次型目标函数取最小。
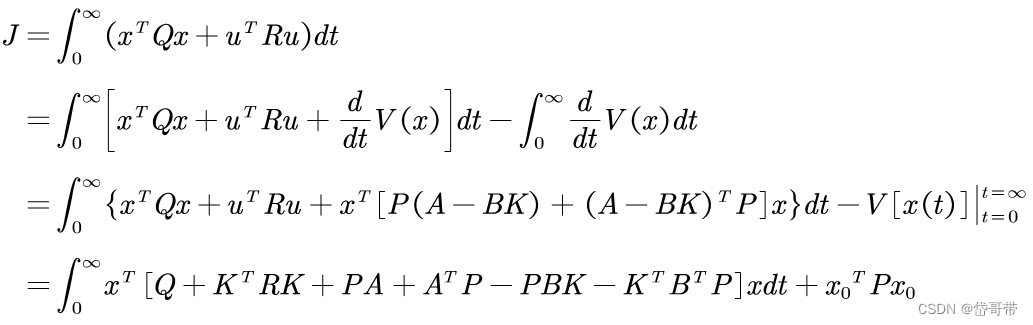
对其求时间的导数 则有代价函数(性能指标)
利用配方法,代价函数(性能指标): 选取一个合适的增益矩阵K,使得性能指标J最小,必须满足以下方程:
求解Riccati(黎卡提)微分方程
就可获得P值与增益K,从而达到LQR控制器最优设计的目的(Q,R的取值一般由经验法或迭代的方法求得)









 就可获得P值与增益K,从而达到LQR控制器最优设计的目的(Q,R的取值一般由经验法或迭代的方法求得)
就可获得P值与增益K,从而达到LQR控制器最优设计的目的(Q,R的取值一般由经验法或迭代的方法求得)