证件照选相信是我们大家日常所需,但是去照相馆真的有点麻烦,尤其是有时候仅仅只是需要换一个背景颜色,其实不用这么麻烦,现在手机上不仅能换背景颜色,还能制作证件照,还很简单,你们是不是还有很多人不知道,那就一起来看看吧!

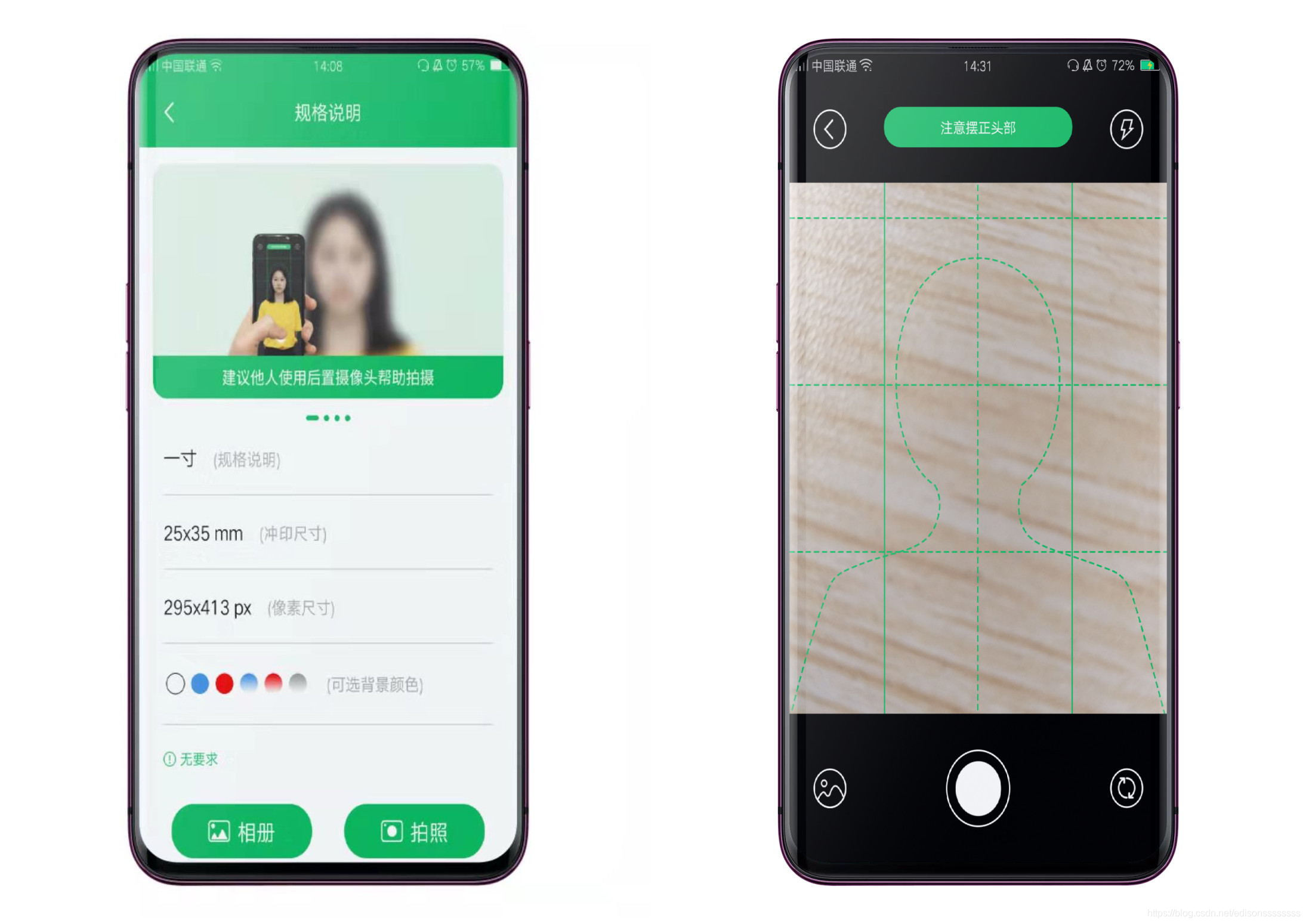
第一步:打开智能证件照相机,选择你想要的证件照尺寸,今天就以1寸证件照为例。选择你所需要的证件照应用场景,例如:出国旅游护照、四六级考试等证件照、还有生活类目面试等。

第二步:此时你可以化一点淡妆,保持气色,点击拍照,就能打开前置摄像头,按照屏幕上提示进行拍摄即可。
第三步:选择证件照背景色,因为不同场合需要的背景颜色不同,选中颜色,点击一键换背景色。然后保存,就能在我们手机相册中找到这张照片。

是不是很简单?新手小白也能超快完成,最后祝大家不管是面试还是旅游都顺顺利利,如果你觉得有用,记得分享给你的家人朋友!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)