之前博客《ROS学习笔记之——基于QGC的PX4在线仿真调PID》已经学习了如何在仿真环境下,调节PID位置环与姿态环。本博文细细的看一下PX4位置环PID调节。
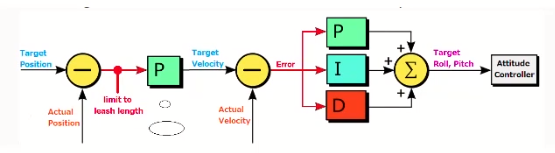
如下图所示。输入的是期望的位置,然后外环是P控制。而内环是速度环,速度环用PID控制。而机器人实际的位置与速度也是需要测准的,以此来保证控制的质量
参考资料
https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video&mod=video&cid=39&vid=1135
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)