1.在libraries/AP_Logger/LogStructure.h中添加自定义的结构体
struct PACKED log_HMSRV {
LOG_PACKET_HEADER;
uint64_t time_us;
uint8_t srv_id;
uint16_t pwm_input;
float pos_cmd;
float pos_sensor;
float voltage;
float current;
float pcb_temp;
float motor_temp;
uint8_t status_info;
};
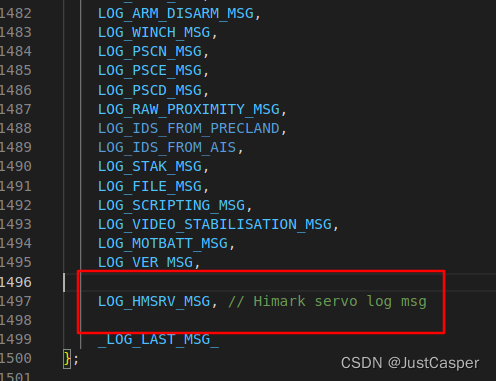
2.添加日志枚举类型(enum LogMessages)
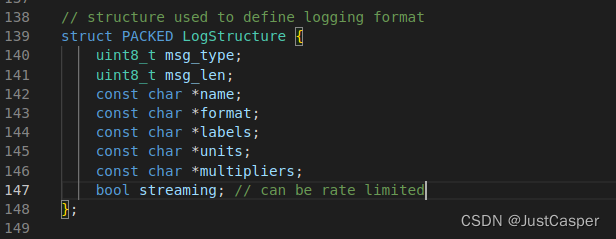
3.在LOG_COMMON_STRUCTURES中添加日志数据格式

日志项格式为:
{type,len,name,format,label,unit,multiplier,streaming}
日志数据格式类型参考如下(在libraries/AP_Logger/README.MD)
# Logger Notes
## Format Types
The format type specifies the amount of storage required for the entry
and how the content should be interpreted.
| Char | C Type |
|------|--------|
|a | int16_t[32]|
|b | int8_t|
|B | uint8_t|
|h | int16_t|
|H | uint16_t|
|i | int32_t|
|I | uint32_t|
|f | float|
|d | double|
|n | char[4]|
|N | char[16]|
|Z | char[64]|
|L | int32_t latitude/longitude (so -35.1332423 becomes -351332423)|
|M | uint8_t flight mode|
|q | int64_t|
|Q | uint64_t|
Legacy field types - do not use. These have been replaced by using the base C type and an appropriate multiplier column entry.
| Char | CType+Mult |
|------|--------------|
| c | int16_t * 100|
| C | uint16_t * 100|
| e | int32_t * 100|
| E | uint32_t * 100|
## Units
All units here should be base units.
This means battery capacity uses "amp \* second" not "milliAmp \* hours".
Please keep the names consistent with Tools/autotest/param_metadata/param.py:33
| Char | Unit Abbrev. | Description | Notes |
|-----|---|---|---|
| '-' | "" | no units e.g. Pi or a string |
| '?' | "UNKNOWN" | Units which haven't been worked out yet....|
| 'A' | "A" | Ampere|
| 'd' | "deg" | of the angular variety | -180 to 180|
| 'b' | "B" | bytes|
| 'k' | "deg/s" | degrees per second | Not an SI unit, but in some situations more user-friendly than radians per second|
| 'D' | "deglatitude" | degrees of latitude|
| 'e' | "deg/s/s" | degrees per second per second | Not an SI unit, but in some situations more user-friendly than radians per second^2|
| 'E' | "rad/s" | radians per second|
| 'G' | "Gauss" | Gauss | Not an SI unit, but 1 tesla = 10000 gauss so a simple replacement is not possible here|
| 'h' | "degheading" | 0.? to 359.?|
| 'i' | "A.s" | Ampere second|
| 'J' | "W.s" | Joule (Watt second)|
| 'l' | "l" | litres|
| 'L' | "rad/s/s" | radians per second per second|
| 'm' | "m" | metres|
| 'n' | "m/s" | metres per second|
| 'N' | "N" | Newton|
| 'o' | "m/s/s" | metres per second per second|
| 'O' | "degC" | degrees Celsius | Not an SI unit, but Kelvin is too cumbersome for most users|
| '%' | "%" | percent|
| 'S' | "satellites" | number of satellites|
| 's' | "s" | seconds|
| 'q' | "rpm" | revolutions per minute| Not an SI unit, but sometimes more intuitive than Hertz|
| 'r' | "rad" | radians|
| 'U' | "deglongitude" | degrees of longitude|
| 'u' | "ppm" | pulses per minute|
| 'v' | "V" | Volt|
| 'P' | "Pa" | Pascal|
| 'w' | "Ohm" | Ohm|
| 'W' | "W" | watt |
| 'X' | "W.h" | watt hour |
| 'Y' | "us" | pulse width modulation in microseconds|
| 'z' | "Hz" | Hertz|
| '#' | "instance" | (e.g.)Sensor instance number|
## Multipliers
This multiplier information applies to the raw value present in the
log. Any adjustment implied by the format field (e.g. the "centi"
in "centidegrees" is *IGNORED* for the purposes of scaling.
Essentially "format" simply tells you the C-type, and format-type h
(int16_t) is equivalent to format-type c (int16_t*100)
tl;dr a GCS shouldn't/mustn't infer any scaling from the unit name
| Char | Multiplier | Description |
|------|------------|---|
| '-' | 0 | no multiplier e.g. char[4] |
| '?' | 1 | multipliers which haven't been worked out yet |
| '2' | 1e2 ||
| '1' | 1e1 ||
| '0' | 1e0 | x1 |
| 'A' | 1e-1 ||
| 'B' | 1e-2 ||
| 'C' | 1e-3 ||
| 'D' | 1e-4 ||
| 'E' | 1e-5 ||
| 'F' | 1e-6 ||
| 'G' | 1e-7 ||
| '!' | 3.6 | (milliampere \* hour => ampere \* second) and (km/h => m/s)|
| '/' | 3600 | (ampere \* hour => ampere \* second)|
4.在LogFile.cpp文件中添加日志记录入口函数,在AP_Logger类中添加成员
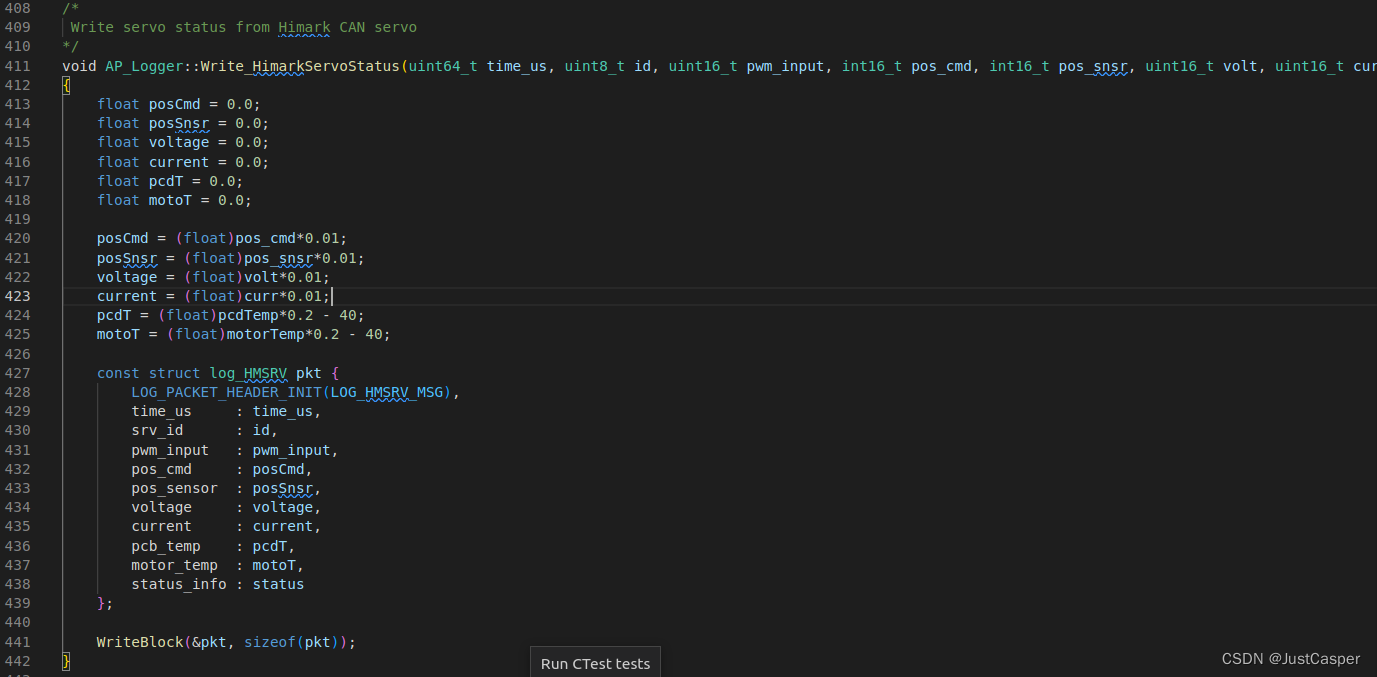
至此添加自定义日志项已完成,调用自定义的日志记录接口即可记录日志。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)