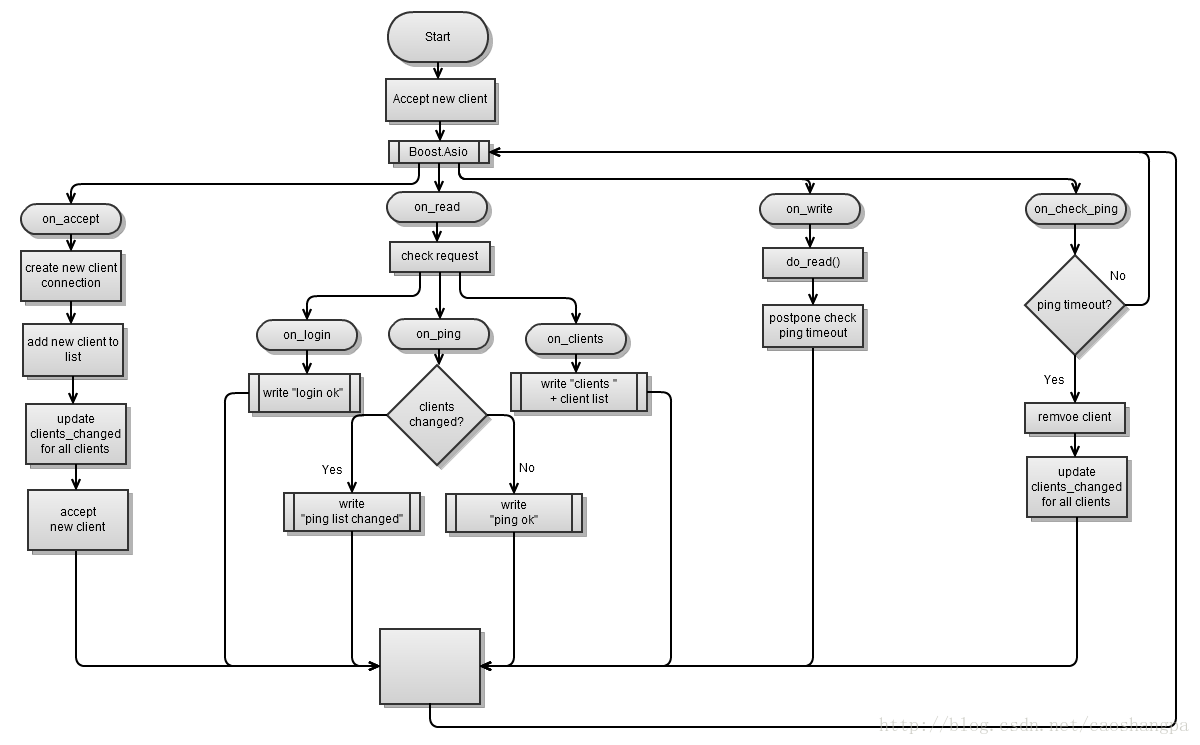
这个流程图是相当复杂的:从Boost.Asio出来你可以看到4个箭头指向on_accept,on_read,on_write和on_check_ping。这也就意味着你永远不知道哪个异步调用是下一个完成的调用,但是你可以确定的是它是这4个操作中的一个。
基于TCP的异步服务端
1.流程图
2.实现
#ifdef WIN32
#define _WIN32_WINNT 0x0501
#include <stdio.h>
#endif
#include <iostream>
#include <boost/bind.hpp>
#include <boost/asio.hpp>
#include <boost/shared_ptr.hpp>
#include <boost/enable_shared_from_this.hpp>
using namespace boost::asio;
using namespace boost::posix_time;
io_service service;
class talk_to_client;
typedef boost::shared_ptr<talk_to_client> client_ptr;
typedef std::vector<client_ptr> array;
array clients;
#define MEM_FN(x) boost::bind(&self_type::x, shared_from_this())
#define MEM_FN1(x,y) boost::bind(&self_type::x, shared_from_this(),y)
#define MEM_FN2(x,y,z) boost::bind(&self_type::x, shared_from_this(),y,z)
void update_clients_changed();
/** simple connection to server:
- logs in just with username (no password)
- all connections are initiated by the client: client asks, server answers
- server disconnects any client that hasn't pinged for 5 seconds
Possible client requests:
- gets a list of all connected clients
- ping: the server answers either with "ping ok" or "ping client_list_changed"
*/
class talk_to_client : public boost::enable_shared_from_this<talk_to_client>
, boost::noncopyable {
typedef talk_to_client self_type;
talk_to_client() : sock_(service), started_(false),
timer_(service), clients_changed_(false) {
}
public:
typedef boost::system::error_code error_code;
typedef boost::shared_ptr<talk_to_client> ptr;
void start() {
started_ = true;
clients.push_back(shared_from_this());
last_ping = boost::posix_time::microsec_clock::local_time();
do_read();
}
static ptr new_() {
ptr new_(new talk_to_client);
return new_;
}
void stop() {
if (!started_) return;
started_ = false;
sock_.close();
ptr self = shared_from_this();
array::iterator it = std::find(clients.begin(), clients.end(), self);
clients.erase(it);
update_clients_changed();
}
bool started() const { return started_; }
ip::tcp::socket & sock() { return sock_; }
std::string username() const { return username_; }
void set_clients_changed() { clients_changed_ = true; }
private:
void on_read(const error_code & err, size_t bytes) {
if (err) stop();
if (!started()) return;
// process the msg
std::string msg(read_buffer_, bytes);
if (msg.find("login ") == 0) on_login(msg);
else if (msg.find("ping") == 0) on_ping();
else if (msg.find("ask_clients") == 0) on_clients();
else std::cerr << "invalid msg " << msg << std::endl;
}
void on_login(const std::string & msg) {
std::istringstream in(msg);
in >> username_ >> username_;
std::cout << username_ << " logged in" << std::endl;
do_write("login ok\n");
update_clients_changed();
}
void on_ping() {
do_write(clients_changed_ ? "ping client_list_changed\n" : "ping ok\n");
clients_changed_ = false;
}
void on_clients() {
std::string msg;
for (array::const_iterator b = clients.begin(), e = clients.end(); b != e; ++b)
msg += (*b)->username() + " ";
do_write("clients " + msg + "\n");
}
void do_ping() {
do_write("ping\n");
}
void do_ask_clients() {
do_write("ask_clients\n");
}
void on_check_ping() {
boost::posix_time::ptime now = boost::posix_time::microsec_clock::local_time();
if ((now - last_ping).total_milliseconds() > 5000) {
std::cout << "stopping " << username_ << " - no ping in time" << std::endl;
stop();
}
last_ping = boost::posix_time::microsec_clock::local_time();
}
void post_check_ping() {
timer_.expires_from_now(boost::posix_time::millisec(5000));
timer_.async_wait(MEM_FN(on_check_ping));
}
void on_write(const error_code & err, size_t bytes) {
do_read();
}
void do_read() {
async_read(sock_, buffer(read_buffer_),
MEM_FN2(read_complete, _1, _2), MEM_FN2(on_read, _1, _2));
post_check_ping();
}
void do_write(const std::string & msg) {
if (!started()) return;
std::copy(msg.begin(), msg.end(), write_buffer_);
sock_.async_write_some(buffer(write_buffer_, msg.size()),
MEM_FN2(on_write, _1, _2));
}
size_t read_complete(const boost::system::error_code & err, size_t bytes) {
if (err) return 0;
bool found = std::find(read_buffer_, read_buffer_ + bytes, '\n') < read_buffer_ + bytes;
return found ? 0 : 1;
}
private:
ip::tcp::socket sock_;
enum { max_msg = 1024 };
char read_buffer_[max_msg];
char write_buffer_[max_msg];
bool started_;
std::string username_;
deadline_timer timer_;
boost::posix_time::ptime last_ping;
bool clients_changed_;
};
void update_clients_changed() {
for (array::iterator b = clients.begin(), e = clients.end(); b != e; ++b)
(*b)->set_clients_changed();
}
ip::tcp::acceptor acceptor(service, ip::tcp::endpoint(ip::tcp::v4(), 8001));
void handle_accept(talk_to_client::ptr client, const boost::system::error_code & err) {
client->start();
talk_to_client::ptr new_client = talk_to_client::new_();
acceptor.async_accept(new_client->sock(), boost::bind(handle_accept, new_client, _1));
}
int main(int argc, char* argv[]) {
talk_to_client::ptr client = talk_to_client::new_();
acceptor.async_accept(client->sock(), boost::bind(handle_accept, client, _1));
service.run();
}
我们已经学到了怎么写一些基础的客户端/服务端应用。我们已经避免了一些诸如内存泄漏和死锁的低级错误。所有的编码都是框架式的,这样你就可以根据你自己的需求对它们进行扩展。
参考链接:http://download.csdn.net/download/caoshangpa/10229882
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)