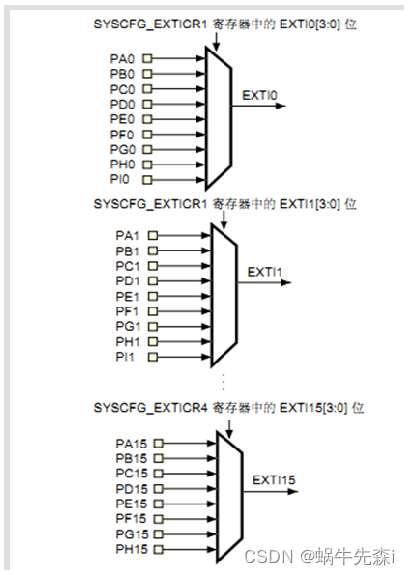
一、GPIO与中断线的映射关系
GPIO 的管脚GPIOx.0 ~ GPIOx.15(x=A,B,C,D,E,F,G,H,I)分别对应中断线 0~15。这样每个中断线对应了最多 9 个 IO 口,以线 0 为例:它对应了 GPIOA.0、GPIOB.0、GPIOC.0、GPIOD.0、GPIOE.0、GPIOF.0、GPIOG.0,GPIOH.0,GPIOI.0。而中断线每次只能连接到 1 个 IO口上,这样就需要通过配置来决定对应的中断线配置到哪个 GPIO 上了。
二、使用 IO 口外部中断的一般步骤
1)使能 IO 口时钟,初始化 IO 口为输入。
2)使能 SYSCFG 时钟,设置 IO 口与中断线的映射关系。
3)初始化线上中断,设置触发条件等。
4)配置中断分组(NVIC),并使能中断。
5)编写中断服务函数。
本实验实现的功能:使用的是中断来检测按键,还是KEY_UP 控制蜂鸣器,按一次叫,再按一次停;KEY2 控制 DS0,按一次亮,再按一次灭;KEY1控制 DS1,效果同 KEY2;KEY0 则同时控制 DS0 和 DS1,按一次,他们的状态就翻转一次。
三、实验代码
首先新建exti.c文件,保存在HARDWARE文件夹中,然后双击HARDWARE文件夹将exti.c添加到工程中。已同样的方式新建exti.h头文件,同样要将头文件路径添加到工程中
exit.c文件代码如下:
#include "key.h"
#include "stm32f4xx_exti.h"
#include "beep.h"
#include "led.h"
#include "sys.h"
void EXTIX_Init()
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
KEY_Init();
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG,ENABLE);
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE,EXTI_PinSource2);
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE,EXTI_PinSource3);
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE,EXTI_PinSource4);
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA,EXTI_PinSource0);
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
EXTI_InitStructure.EXTI_Line = EXTI_Line2 | EXTI_Line3 | EXTI_Line4;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void EXTI0_IRQHandler()
{
if(EXTI_GetITStatus(EXTI_Line0) != RESET)
{
delay_ms(10);
if(WK_UP == 1)
{
BEEP=!BEEP;
}
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
void EXTI2_IRQHandler()
{
if(EXTI_GetITStatus(EXTI_Line2) != RESET)
{
delay_ms(10);
if(KEY2 == 0)
{
LED0=!LED0;
}
EXTI_ClearITPendingBit(EXTI_Line2);
}
}
void EXTI3_IRQHandler()
{
if(EXTI_GetITStatus(EXTI_Line3) != RESET)
{
delay_ms(10);
if(KEY1 == 0)
{
LED1=!LED1;
}
EXTI_ClearITPendingBit(EXTI_Line3);
}
}
void EXTI4_IRQHandler()
{
if(EXTI_GetITStatus(EXTI_Line4) != RESET)
{
delay_ms(10);
if(KEY0 == 0)
{
LED0=!LED0;
LED1=!LED1;
}
EXTI_ClearITPendingBit(EXTI_Line4);
}
}
设置好中断后,当按键按下有上升下降沿时触发中断,进入中断服务函数,判断中断标志位,延时10Ms去抖动,再判断是否是高低电平执行相关操作。
头文件exit.h只有一个声明初始化外部中断函数
#ifndef __EXTI_H
#define __EXTI_H
void EXTIX_Init(void);
#endif
主函数main中只是初始化相关外设,在while(1)中等待即可
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "beep.h"
#include "key.h"
#include "exti.h"
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
delay_init(168);
uart_init(115200);
LED_Init();
BEEP_Init();
EXTIX_Init();
LED0=0;
while(1)
{
printf("OK\r\n");
delay_ms(1000);
}
}
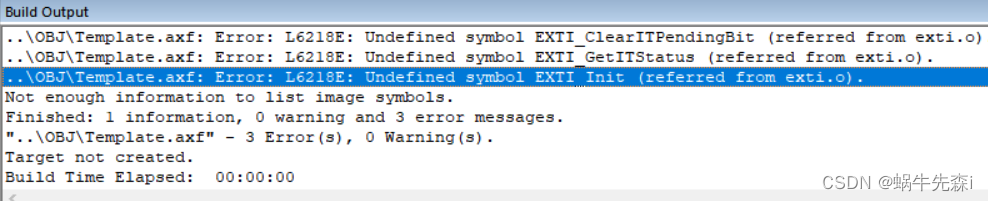
编译后报错,提示关于EXIT类函数未定义,这是因为在GPIO那一章节编译全部库文件比较慢把不相关的库文件从工程中删除了,所以操作找不到相关库函数
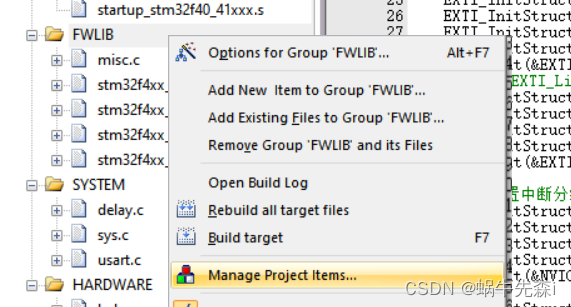
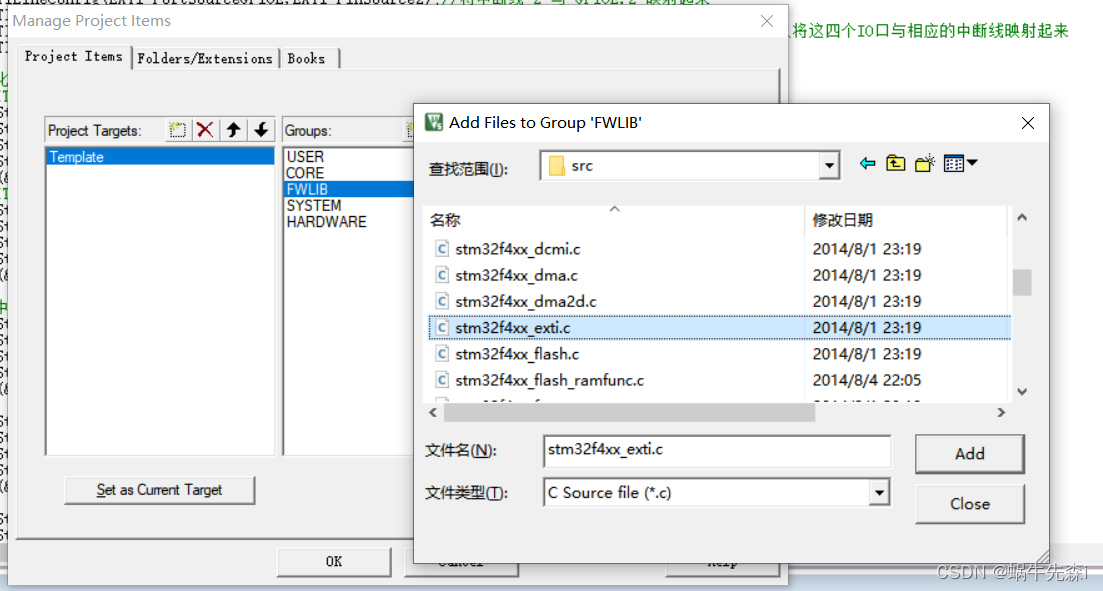
这章的代码主要分布在固件库的 stm32f4xx_exti.h 和 stm32f4xx_exti.c 文件中,所以右击FWLIB文件夹选择下面按钮
将库文件添加到工程中,再编译就没有报错了
烧录进开发板打开串口设备一直打印OK,表示设备正在运行,按下按键执行相关操作。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)