2022 数学建模国赛B题 高教社杯 含半成品论文 部分代码 全部数学模型 和全套思路 定时更新!!
全部内容见:https://mianbaoduo.com/o/bread/mbd-Y5WUkppr

第一问
根据题目可知以下几点
1、无人机被动测距只能测得两个发射机的夹角,但是不能知道发射机位于接收机的绝对方位,因此传统的几何定位法是用不了的;另外虽然只是已知夹角但是根据图片应该是可以假设知道两个发射机的哪个在左边哪个在右边
2、虽然无人机的精确坐标是不知道的,但是无人机的阵型是已知的,而且大部分无人机的位置仅仅是略有偏差,因此可以认为每个无人机是知道自己的大概的位置的,定位时可以用理论位置排除不合理的解。
3、每个无人机独立定位修正以后,是可以作为新的发射基站给别的无人机定位的。
第一小问
首先简单介绍以下代码里用到的定位算法的基础理论
若已知图中角度X1,则可以正弦定理求得途中距离D1
正弦定理
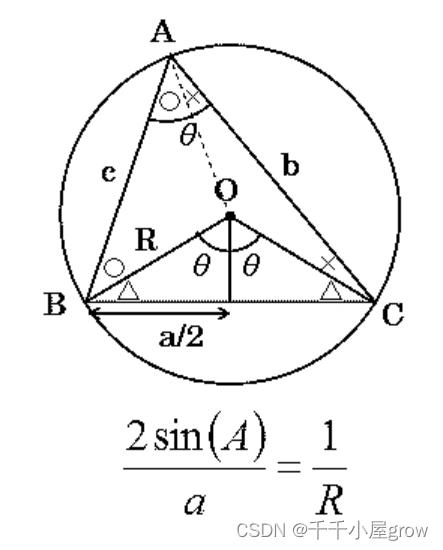

根据角度X1和目标D1既可以得到待测目标的位置如下式所示

根据上述式子可以建立目标函数
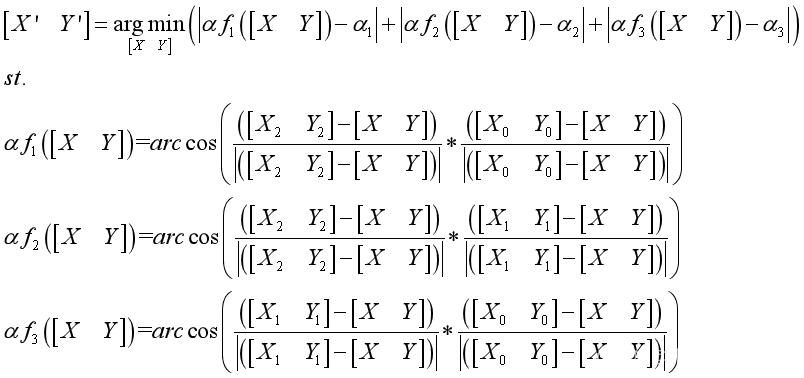
本文中采取遍历搜索的方式找到最优的X1和D1,是的观测角度和估计的角度的误差最小。
仿真结果如上图所示,各个方向的目标均被准确的定位出来了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)