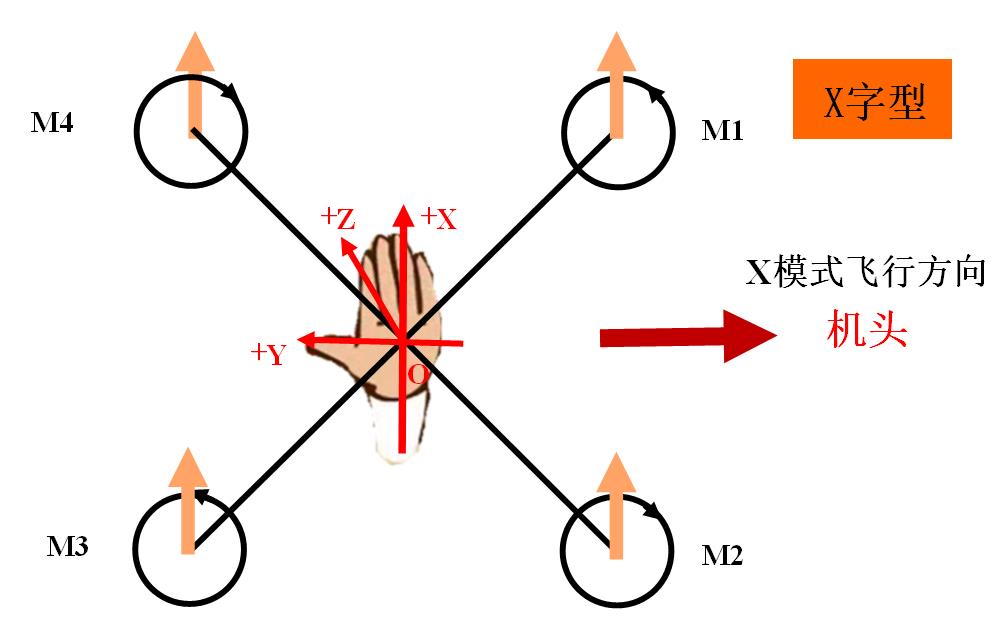
说明:陀螺仪和加速度计摆放坐标如下:机头方向可以任意设置,如图所示X型和十字型无人机的机头方向。
由于电机转动会产生一个扭力,故相邻的两个电机转动方向相反。
在实际实验中,当姿态角变化时,具体如何变化自行脑补,下面给出其中一种三轴姿态分解变化时候的各个电机PWM增加、减小示意公式: