ArduPilot开源飞控系统之简单介绍
- 1. 源由
- 2. 了解&阅读
- 2.1 ArduPilot历史
- 2.2 关于GPLv3
- 2.3 ArduPilot系统组成
- 2.4 ArduPilot代码结构
- 3. 后续
-
- 4. 参考资料
ArduPilot是一个可信赖的自动驾驶系统,为人们带来便利。为此,提供了一套全面的工具,几乎适用于任何车辆、无人机、潜艇、气球等设备。
作为一个开源项目,在用户社区的快速反馈的基础上不断发展。相应的开发团队与社区和商业合作伙伴合作,为ArduPilot添加惠及所有人的功能。
尽管ArduPilot不生产任何硬件,但ArduPilot固件可在各种不同的硬件上工作;加上地面控制软件,运行ArduPilot的无人驾驶设备可以具有高级功能,包括与操作员的实时通信。
1. 源由
在2022年5月份开始逐步尝试更多的了解飞控系统:
- 从基于Betaflight的果冻F450开始,搭建了第一台稳定的Betaflight Mark4
- 后来基于iNavflight策划SnapDragonfly,打通技术链路,并规划编程无人机产品系统,更加紧密的结合Snap可视化编程和无人机应用
从商业角度看,其实比较成功的开源飞控系统,在大陆这边更多的是PX4。
主要原因是PX4是BSD 3-clause license,换句话说,就是修改代码可以不开源,从开源的角度,这个显然不利于技术的发展。
而与之相应的ArduPilot飞控系统是基于GPLv3。这个从技术发展的角度就非常友好,即修改了代码,必须开源出来。
当然规避方法不是没有,那就是Companion Computer通过标准协议接口进行解耦。这种就是非常好的技术与商业的二合一。
今天开始我们陆续的学习下的各个组成以及模块化设计实现的方法。
2. 了解&阅读
对于一个现有成熟系统,最好的了解方式:阅读代码、文档,以及上手使用该系统以获取第一手信息。
撰写这篇之前,我已经开始了一段时间的摸索:
- 从ArduPilot飞控之DIY-F450计划起步
- 目前已经可以手动stabilize模式下试飞
后续,计划是采用Mission Planner进行地面站的控制,进行轨迹巡航和自动降落等功能,当然里面还有很多好的内容,相信后续有时间逐步的研究,学习。
2.1 ArduPilot历史
关于ArduPilot的历史,官网上有非常详细的描述,这里就笔者比较关注的重点,特别列出,详见:History of ArduPilot
- 2007年5月 Chris Anderson创办DIYDrones.com。
- 2008年9月 Jordi制造了能够自主飞行的传统直升机无人机,并赢得了第一届Sparkfun AVC比赛。
- 2009年 Chris Anderson和Jordi Munoz建立了3D Robotics。
- 2012年 3D Robotics发布了APM2.5/2.6
- 2013年1月 ArduPilot代码从google code搬迁到了github。
- 2014年10月 DroneCode基金会成立。
- 2016年3月 3DR因裁员而停止对ArduPilot社区的直接资助。同年,成立ardupilot.org非营利组织和新网站。
个人感觉前面这些历史变迁,值得回顾下,开源最后的好处就是大家都能使用到最先进的技术。
同时,大陆某宝上售卖的很多APM的版本都是2.6/2.8,大家看下就能知道,这个的水平基本上是2012年的,而现在已经是2023年了。10年的变迁,技术突飞猛进,所以建议大家买个相对靠近的飞控来学习。
这里有比较成熟且在官网有记录的硬件,详见:Autopilot Hardware Options
注:笔者这款就是Closed hardware里面的一个Holybro Kakute F7 AIO,点进去就能看到使用上述板子需要注意的配置项。
2.2 关于GPLv3
可能很多人并不太了解软件代码遵循的License是什么?其实换句话说,就是知识产权归属的问题。之前有整理过使用最多的9种License,有兴趣的朋友可以参考。
这里强调一下,主要目的是更好的让大家理解该GPLv3的好处,同时也给需要应用规避的商业操作做了技术指导。
首先,根据ArduPilot项目的性质,可以根据许可证条款自由使用Github存储库中提供的所有代码和工具,而无需任何授权或参与。非常感谢那些将此软件纳入其产品中进行销售的公司和个人。相当多的人已经这样做了。但是,许可证需要指出一些内容:
- 告知您的客户该软件是开源的,并提供产品中的实际源代码,或提供可以找到源代码的链接
- 与个人开发人员的贡献一样,如果您能通过电子邮件向我们通报包含该软件的产品,我们将不胜感激partners@ardupilot.org。
- 此外,对于那些可能对更广泛的社区有用的更改,如果您可以使用pull请求将它们贡献回来,以考虑添加到原始代码库中,我们将不胜感激。
为什么我们选择这个许可证而不是其他许可证?
- 为项目贡献bug修复和增强(或者至少向最终客户提供这些修复)的需求增加了贡献者之间的合作。如果没有这一要求,参与者会倾向于对自己进行哪怕是微小的改进,以获得相对于其他贡献者的优势。有证据表明,这很快导致了项目中许多不兼容的分支,对所有人都不利。
- 许可证的“v3”部分确保购买设备的客户有权升级或更换飞行控制器上的ArduPilot版本。许可证并不要求它实际工作,只要求升级是可能的。这确保了即使制造商停止支持产品(这可能是出于非常合理的原因),如果所有者或开发社区决定获得支持,产品也可以继续发挥作用。ArduPilot已经出现了这样的例子。请注意,此要求仅适用于“用户产品”和制造商在技术上可以升级设备固件的产品。
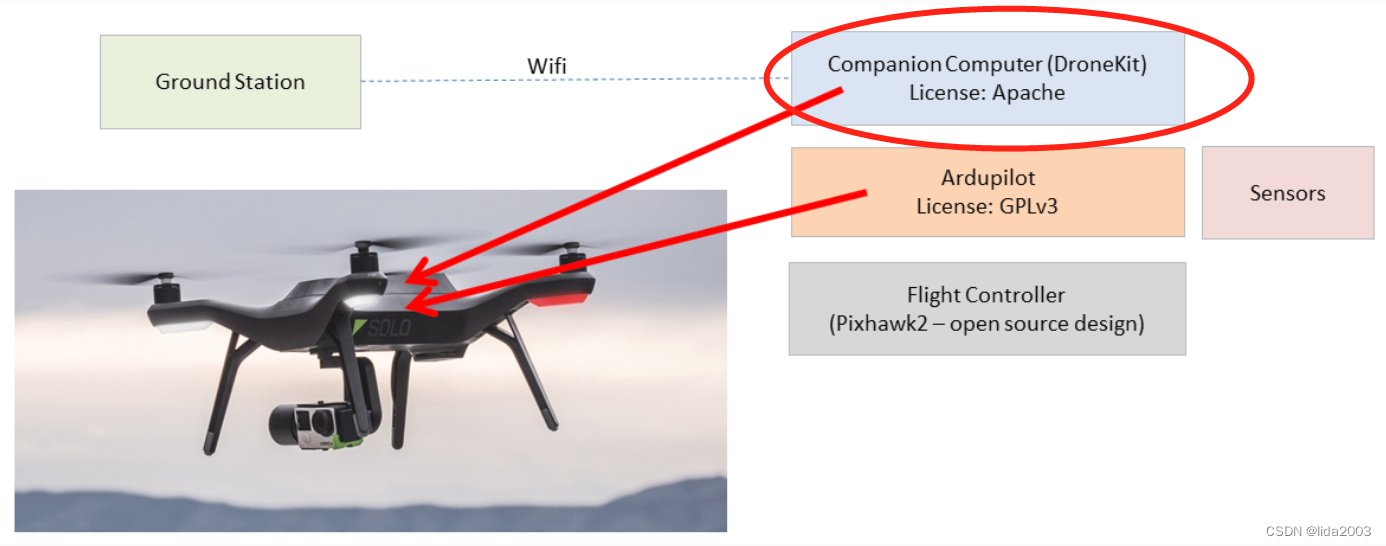
可以集成封闭源代码(即专有)和开放源代码吗?
ArduPilot是开源的(GPLv3),但可以使用配套计算机运行封闭源代码,以方便将ArduPilet集成到您的系统中,或者添加更高级别的功能,使自己与竞争对手区别开来。建立在免费低级别飞行代码的可靠性之上,这样你就可以投资于更高级别的功能。我们相信ArduPilot与领先的封闭系统一样可靠,您不必受制于特定的制造商。以下是一家制造商如何做到这一点的图片。
2.3 ArduPilot系统组成
从整体上看下ArduPilot系统,其实不难发现主要组成归纳:
- 设备(应用):AntennaTracker/ArduCopter/ArduPlane/ArduSub/Rover/Blimp
- 库(组件):libraries
- 模块(三方):modules
- 地面站软件:Mission Planner/APM Planner 2.0/QGroundControl
- 标准协议:MAVLink/UAVCAN
- SDK、工具:MAVProxy/DroneKit
- 遥控接收机 + 遥控器
- 外部传感器(GPS/Compass/Lidar etc)
- 维测工具(调试工具,配置工具)
- 视频系统(单独拎出来,其实视频/照片都是摇杆的一部分)
注:可能有偏颇,但是这里重点是想说明我们想要了解整个系统运作,就需要了解系统的组成结构。
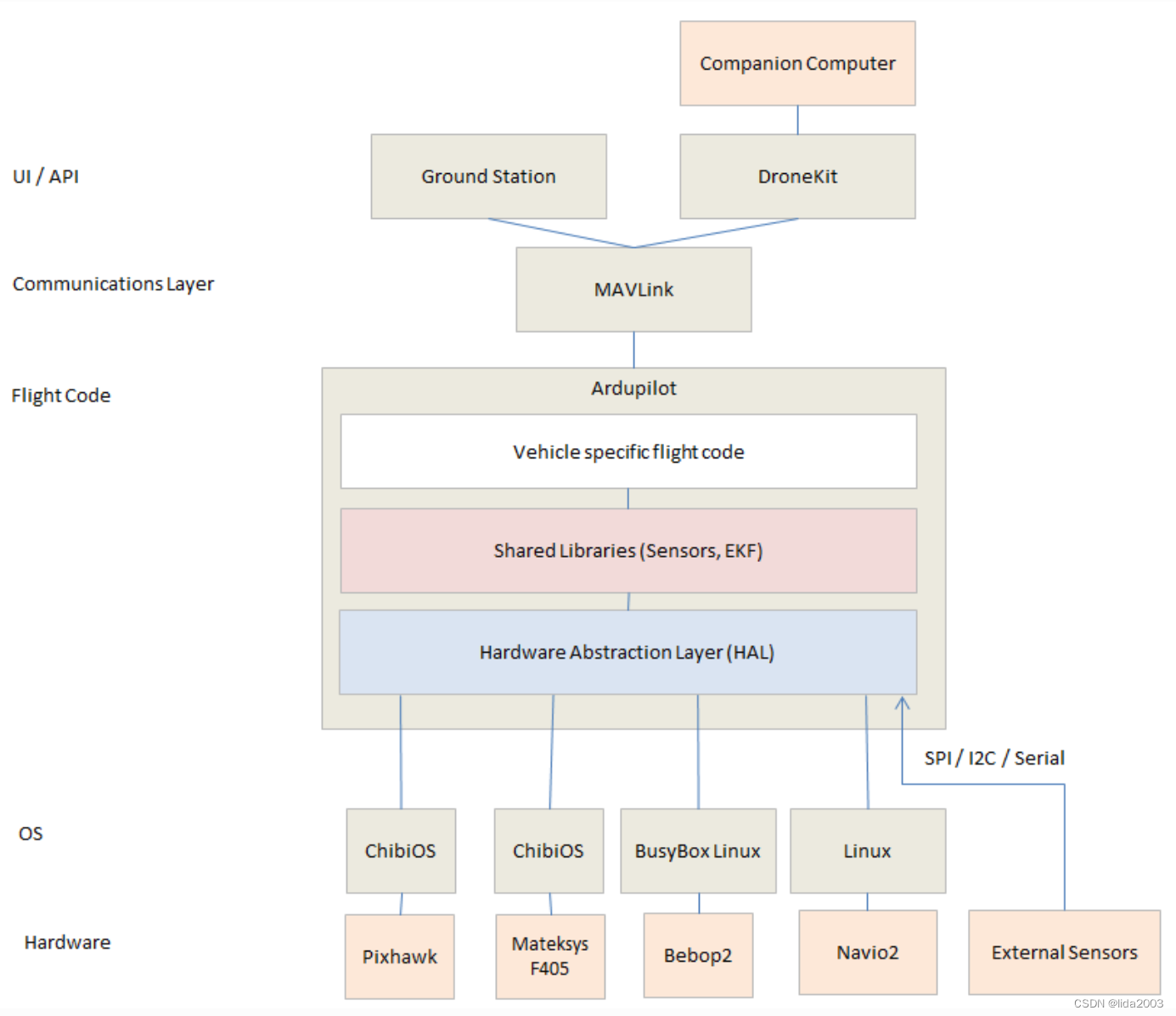
2.4 ArduPilot代码结构
ArduPilot的基本结构分为5个主要部分:
- 设备代码(AntennaTracker/ArduCopter/ArduPlane/ArduSub/Rover/Blimp)
- 共享库
- 硬件抽象层
- 工具目录
- 外部支持代码(即mavlink、dronekit)
.(工程目录结构)
├── AntennaTracker
├── ArduCopter
├── ArduPlane
├── ArduSub
├── Rover
├── Blimp
├── libraries
├── modules
└── Tools
注:MAVLink作为一种标准协议,将飞控从系统中独立出来,完成最为基本的飞行控制动作。
3. 后续
接下去,我们将逐步的基于现有DIY系统来逐步了解和学习ArduPilot系统,更新的章节会和Betaflight类似在此一并提供链接。
3.1 DIY-F450
- ArduPilot飞控之DIY-F450计划
- ArduPilot Kakute F7 AIO DIYF450 without GPS配置
- ArduPilot Kakute F7 AIO DIYF450 之GPS配置
- ArduPilot之posHold&RTL实测
- ArduPilot之GPS Glitch问题&M8N模块配置
- 持续更新中。。。。。。
3.2 软件设计
- ArduPilot之开源代码框架
- ArduPilot飞控之ubuntu22.04-SITL安装
- ArduPilot飞控之ubuntu22.04-Gazebo模拟
- ArduPilot飞控之Mission Planner模拟
- ArduPilot飞控AOCODARC-H7DUAL固件编译
- ArduPilot之开源代码Library&Sketches设计
- ArduPilot之开源代码Sensor Drivers设计
- ArduPilot之开源代码基础知识&Threading概念
- ArduPilot之开源代码UARTs and the Console使用
- ArduPilot之开源代码调试技巧
- ArduPilot飞控启动&运行过程简介
- 持续更新中。。。。。。
注:如果大家有兴趣研究和学习的,可以通过Welcome to the ArduPilot Development Site进行学习,源代码链接github-ArduPilot。
4. 参考资料
【1】BetaFlight开源工程结构简明介绍
【2】BetaFlight开源代码框架简介
【3】四轴飞控DIY简明步骤介绍
【4】四轴飞控DIY Mark4 - 减震
【5】关于穿越机FPV视频果冻效应的讨论
【6】Snap4iNav_Project
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)