Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
Ardupilot IMU恒温控制代码学习
2023-05-16
目录
文章目录
目录
摘要
第一章原理图学习
第二章恒温代码学习
1.目标温度怎么设置
摘要
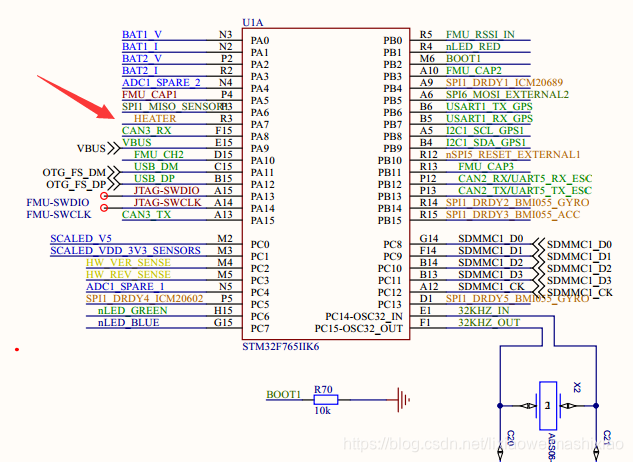
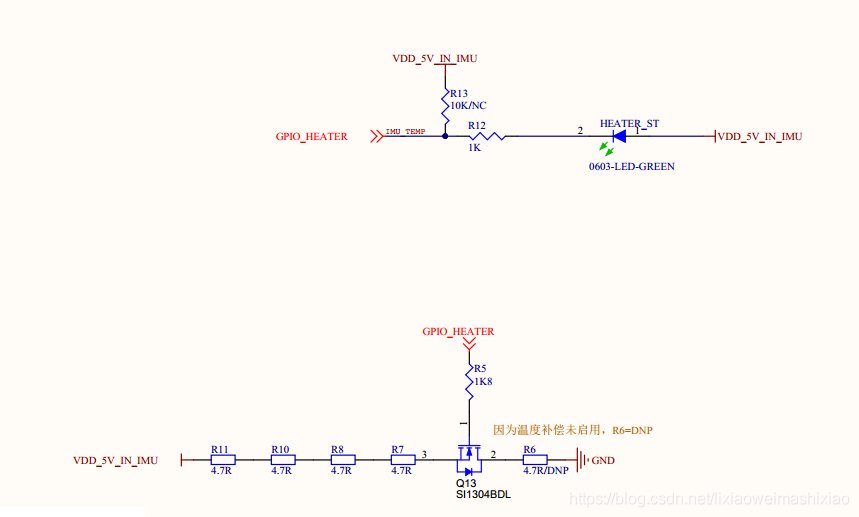
本节主要学习ardupilot的IMU恒温控制代码,采用的飞控是pixhawk_v5,欢迎一起交流学习。
第一章原理图学习
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
ArduPilot
IMU
恒温控制代码学习
Ardupilot IMU恒温控制代码学习 的相关文章
Ubuntu18下xsens IMU的驱动安装及使用imu_utils标定
最近在做xsens IMU的标定工作 xff0c 网上资源很多很杂 xff0c 打算按自己的操作过程 细节及遇到的问题记录一下 xff0c 里面有参考的博文都附了链接 主体可参考此博文 xff1a VIO 中 IMU 的标定流程 1 3 i
Docs » Learning the ArduPilot Codebase » EKF » Extended Kalman Filter Navigation Overview and Tuning
原文 xff1a http ardupilot org dev docs extended kalman filter html extended kalman filter navigation overview and tuning 本
无人机飞控平台ArduPilot源码入门教程 - 首页
原文链接 简介 ArduPilot代码库有点大 核心的ardupilot git树大概有70万行代码 对新人来说这有点吓人 这个文档打算给出一点建议 关于如何快速上手相关代码 我们假设你熟悉C 43 43 的关键概念 另外好多例子都是假设你
ORB-SLAM3测试:数据集(单目/双目/imu)& ROS (D435 T265)
ORB SLAM3环境配置 安装各种依赖库 orb slam3非常友好 xff0c 不用自己下载各种依赖库 xff0c 因为他们全部在thirdParty文件夹中 xff0c 编译orb slam3的同时会自动编译各种依赖库 Eigen3
关于imu的介绍
1 imu时惯性运动丹云 xff0c 包含加速度计和陀螺传感器的组合 它被用来检查加速度和角速度 xff08 IMU传感器 xff0c 你所需要知道的全部 知乎 xff09 虽然时外文翻译的 xff0c 凡是整体风格清晰 2 imu的使用
关于VIO中IMU预积分的讲解
Why VIO 转自 xff1a https zhehangt github io 2019 03 23 SLAM Basic VIOInit 首先我们先简单回顾一下为什么要做VIO xff0c 以及为什么要做VIO初始化 我们知道单目相机
RealSenseD345I —— imu + camera标定
目录 1 标定目的 2 标定准备 3 标定步骤 nbsp nbsp nbsp nbsp 1 IMU标定 nbsp nbsp nbsp
Ardupilot添加自定义日志(AP_LOG)
1 在libraries AP Logger LogStructure h中添加自定义的结构体 span class token keyword struct span span class token class name PACKED
Ardupilot 编译Bootloader
1 清理之前的编译中间文件 xff0c 一定要清理一下 xff0c 能避免很多奇怪的问题 span class token punctuation span span class token operator span waf distcl
ros 下面同步相机和IMU 两个topic
This file is used for collecting data fromm imu and camera at the same time One camera and one imu include lt ros ros h
IMU让无人机控制变得更轻松
多翼无人机广泛应用于监视和侦察 航空摄影和测量 搜索和救援任务 通信中继和环境监测 目前无人机的手动控制大部分基于视觉反馈 xff0c 所以操作环境中的障碍物会造成干扰 因此 xff0c 需要其他感官反馈 xff0c 例如触觉 xff0c
IMU误差模型简介及VINS使用说明
1 IMU误差来源 2 IMU噪声模型 Noise and Bias kalibr中的imu noise model 参考 xff1a https github com ethz asl kalibr wiki IMU Noise Mode
利用IMU数据来计算位移
目标 xff1a 利用IMU测得的加速度信息来计算位移 xff0c 很简单假设是匀加速运动或是匀速运动都可以 xff0c 主要是看问题的背景来具体去确定运动模型 xff0c 这里我就取个简单的匀加速运动模型 学习过程 xff1a 1 了解I
Ardupilot飞控编译环境搭建
构建环境 Ardupilot具有完整的开发库 xff0c 其编译代码可以直接下载 xff0c 在Windows上 xff0c 可以利用Cygwin编译器来进行下载并编译 xff0c 对此怒飞垂云的教程中有详细的下载方法 xff1a 飞控固件
IMU 测量模型和运动学模型
一 概念 高斯白噪声 测量噪声是AD转换器件引起的外部噪声 xff0c 波动激烈的测量白噪声 随机游走 这里指零偏Bias 随机游走噪声 xff0c 是传感器内部机械 温度等各种物理因素产生的传感器内部误差的综合参数 xff0c 是变化缓慢
Ardupilot IMU恒温控制代码学习
目录 文章目录 目录 摘要 第一章原理图学习 第二章恒温代码学习 1 目标温度怎么设置 摘要 本节主要学习ardupilot的IMU恒温控制代码 采用的飞控是pixhawk v5 欢迎一起交流学习 第一章原理图学习
Ardupilot SITL——arducopter 操作步骤
打开cygwin输入 cd ardupilot ArduCopter Tools autotest sim vehicle py map console xff08 默认master下版本arducopter xff0c 默认模拟 四轴 x
IMU-Allan方差分析
使用Allan方差来确定MEMS陀螺仪的噪声参数 陀螺仪测量模型为 使用长时间静止的陀螺仪数据对陀螺仪噪声参数进行分析 上式中 三个噪声参数N 角度随机游走 K 速率随机游走 和B 偏差不稳定性 背景 Allan方差最初由David W A
浙江大学提出自感知IMU网络精准捕获3D变形
运动捕捉目前有两种主流方法 视觉捕捉能捕获复杂的三维几何变形 但依赖于昂贵的光学设备并且存在视线遮挡问题 基于IMU的方法虽然简便 但难以捕获细微的3D变形 为了解决这个问题 浙江大学的研究者们提出了一种可配置的自感知IMU传感器网络 解决
IMU用于上肢功能评估
来自日本团队牵头研究揭示了利用九轴运动传感器评估上肢Fugl Meyer FMA 的潜力 该探索侧重于将惯性测量单元 IMU 集成到 FMA 的方法中 并探究是否可以出现标准化和更客观的测量 从而解决动态运动评估中的一个紧迫问题 九轴 IM
随机推荐
Ubuntu:pip安装时unable to execute ‘gcc‘: No such file or directoryerror: command ‘gcc‘ failed with
unable to execute 39 gcc 39 No such file or directory error command 39 gcc 39 failed with exit status 1 使用命令 xff1a sudo
python的print的使用 %d ; format等
python基础 格式化输出 xff08 用法和format用法 xff09 fat39 博客园 目录 用法 format用法 用法 1 整数的输出 o oct 八进制 d dec 十进制 x hex 十六进制 2 浮点数输出 xff08
mmdetection中如何保存save best epoch的checkpoints;MMdetection如何保存训练过程中评价指标最好/最优的轮次的模型
api的训练文件中需要 eval hook 61 DistEvalHook if distributed else EvalHook runner register hook eval hook val dataloader save be
NVIDIA Jetson Xavier NX入门(3)——pytorch和torchvision安装
NVIDIA Jetson Xavier NX入门 xff08 3 xff09 pytorch和torchvision安装 1 安装pytorch NVIDIA下载pytorch官方网址是 xff1a https forums develo
Jetson xavier NX等Jetson系列开发板设置Python脚本的开机自启动(需要激活conda环境下)
Jetson xavier NX开机自启动python程序 失败案例 xff1a 本人使用shell脚本进行开机自启动失败 xff1a 当时严格按照Jetson nano开机自启动python程序的相关操作进行设置 新建start sh文件
在Windows环境下使用C++编译,编译器指出cout是一个未定义变量的三种解决方法
1 在头文件下加入 using namespace std span class token macro property span class token directive keyword include span span class
STM32识别圆——色块追踪法
前言 识别圆采用OpenCV来做比较简单 xff0c 可以用HoughCircles函数 xff0c 但是如何在内存和资源都很紧张的STM32上面实现圆识别算法 xff0c 是本文的写作目的 本文的算法采用Python实现 xff0c 不采
字符串处理
在C语言中 xff0c 有时候要将数组转换成字符串 xff0c 可以使用strcat buf buf2 将buf2连接到buf之后 xff0c 讲一个数字转换成字符串输出 xff0c 可以用sprintf buf2 34 3 2f 34 r
rosdep update timeout问题终极解决办法
rosdep update timeout问题终极解决办法 问题描述 rosdep update reading in sources list data from etc ros rosdep sources list d Hit htt
Gazebo常见问题
Gazebo常见问题 问题目录1 Gazebo打不开2 how to build and launch a world in Gazebo 问题目录 在Gazebo仿真运行中或者之前 xff0c 会经常出现这样那样的问题 xff0c 以下列
Reinforcement Learning学习笔记(程序)Shusen Wang老师的深度强化学习系列课程
目录 xff1a p1基本概念continued p1基本概念 continued span class token keyword from span numpy span class token punctuation span ran
matlab机器人工具箱10.3.1 rne()函数报错 无法执行赋值,因为左侧的大小为 1-by-1,右侧的大小为 0-by-0。
昨天调用matlab机器人工具箱的动力学函数rne 出现了一个很奇怪的报错 xff1a span class token operator span 三连杆的质量 质心位置 惯性张量 电机惯量定义 xff1a m span class to
struct结构体使用
今天学习了结构体 xff0c 平常写项目中几乎没有用到过 xff0c 还是好奇他的用法 xff0c 就去学习了 xff0c 为了加深印象 xff0c 也顺便记录了一下 我理解的结构体是相比枚举和泛型集合定义更牛的结构 xff0c 有成员变量
stm32串口dma加空闲中断 实现fifo接收数据 串口高效收发思路
我做这个串口数据接收 dma 43 空闲中断 加fifo 实现串口的高效收发 xff0c 主要是串口接收的数据长度不定长 xff0c 时间超时也不好做 xff0c 还要串口收发的效率要高 xff0c 采用串口数据的接收 dma 43 空闲中
JVM中的堆和栈到底存储了什么
JVM数据区 先上一张Java虚拟机运行时数据区中堆 栈以及方法区存储数据的概要图 xff0c 如下所示 xff1a 然后我们来具体解析一下堆和栈 堆 堆是存储时的单位 xff0c 对于绝大多数应用来说 xff0c 这块区域是 JVM 所管
详解使用VS code搭建C语言环境遇到的那些坑(适合小白)
Vs code搭建C语言环境 为啥想起来要装c环境 xff1f 是因为亲属家的大一新生小朋友问我关于c的问题 xff01 好吧 xff0c 学c语言那是20年前的事儿了 xff0c 但是在小朋友面前也不能跌份 xff0c 于是乎准备温习一下
# Android中的任务和返回栈总结
Android中的任务和返回栈 任务栈的基础知识 xff1a 任务是指在执行特定作业时与用户交互的一系列 Activity 这些 Activity 按照各自的打开顺序排列在堆栈 xff08 即 返回栈 xff09 中 为什么要用任务栈 为了
低成本DIY:4G/5G网络遥控无人机-无人车-图传/数传/遥控一体!
方案概述 无人机 无人车 无人船等机器 通过数据线连接安卓手机 xff0c 手机4G上网于是就可以实现超远程图传 数传和遥控 再在控制端手机上通过 2R酷玩 App远程操控 如果你本来就有一套常规遥控器控制的无人机 无人车的东西 xff0c
你知道底层自旋锁是如何实现的吗
我们在开发中 xff0c 经常会用到自旋锁 xff0c 对于使用接口来讲 xff0c 仿照例子谁都会用 xff0c 但是你知道其是如何实现自旋的吗 xff1f 今天我们就来讨论一下其实现原理 1 首先 xff0c 我们需要实现一个结构体用于
Ardupilot IMU恒温控制代码学习
目录 文章目录 目录 摘要 第一章原理图学习 第二章恒温代码学习 1 目标温度怎么设置 摘要 本节主要学习ardupilot的IMU恒温控制代码 采用的飞控是pixhawk v5 欢迎一起交流学习 第一章原理图学习
热门标签
dtf
keymapping
tvos
angularpwa
codereuse
sfsymbols
sse4
synonym
sparklyr
smime
mifare
xpath20
reactrails