目录
赛道环境
红外传感器的特征
TCRT5000传感器
LM339单限电压比较器
LM339简介
编辑
单限电压比较器仿真
红外循迹模块的设计
红外循迹模块原理图
红外循迹模块原理图讲解
赛道环境

红外传感器的特征
TCRT5000传感器
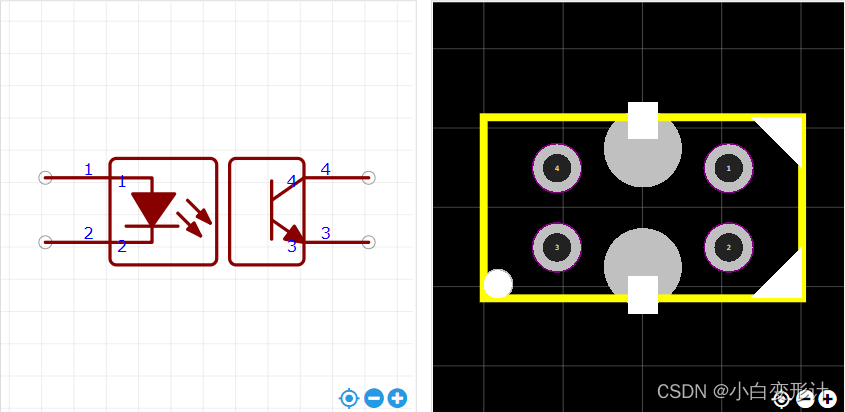
- 红外传感器由一个红外发光二极管和一个光电三极管组成
- 当检测到面积为黑色时,接收端检测的光线很弱,接收端处于截止状态
- 当检测到面积为白色时,接收端检测的光线很强,接收端处于导通状态
LM339单限电压比较器
LM339简介
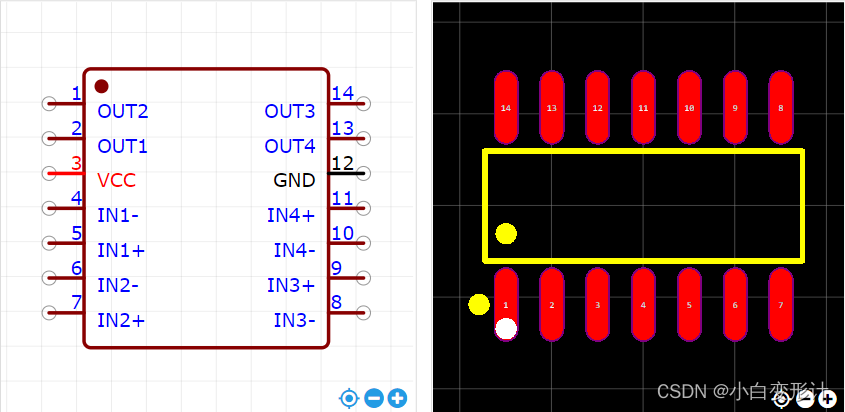
- LM339为四路输出比较器
- 每路比较器有两个输入端一个输出端
- 输入端分为同向输入端(+)与反向输入端(-)
- 当 (+)>(-)输出端为截止信号 (故需要加上拉电阻,拉至高电平)
- 当(+)<(-) 输出端为低电平
单限电压比较器仿真


- 上图为单限电压比较器仿真图
- 反向输入端为比较电压比较基准电压(5v)
- 同向输入端采取单刀双掷开关,可接10v与GND
- R1为上拉电阻,当(+)>(-)时,比较器截止,为后续电路提供高电平
- 当 同向输入端接 GND时 ,比较器输出低电平
- 当 同向输入端接 10V 时,比较器截止
红外循迹模块的设计
红外循迹模块原理图

红外循迹模块原理图讲解
红外检测模块:
- 当光电三极管接收到足够光照时导通,+IN 输出低电平
- 当光电三极管接收到光照不足时截止,+IN 输出高电平
输入基准电压:
- 调节滑动变阻器,使 -IN 输出电压,低于 +IN 输出高电平电压
比较器:
- 将两输入电压进行比较,当 +IN>-IN 时 OUT 输出截止,反之OUT输出低电平
输出指示模块:
- 当 OUT 截止时,指示灯VCC与上拉电阻VCC抵消,LED不导通
- 当 OUT 输出低电平时,LED导通
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)