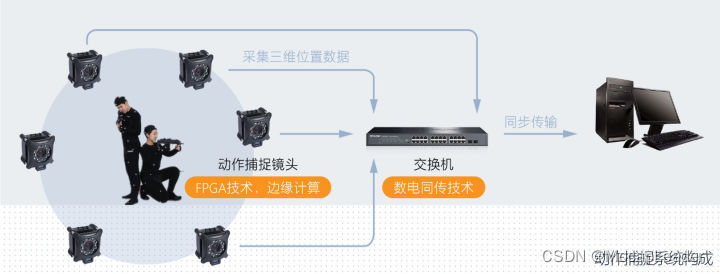
一套光学动作捕捉系统由红外动作捕捉镜头、动作捕捉软件、反光标识点、POE交换机、和若干配件组成(如标定框和镜头固定装置等)。其本质是定位系统,通过计算分析,来获取与其相关的速度、加速度等多种运动学数据。
动作捕捉镜头
光学动作捕捉镜头是动作捕捉系统的核心,镜头的分辨率与视场角等数据决定了整个动作捕捉系统的动作捕捉效果与精度。
以红外光为原理,通过多个镜头对特定标记点的观察定位来获取标记点的具体空间位置。光学动作捕捉镜头面板上的LED灯发出特定波长的红外光,照到被捕捉物,也就是反光标记点,反光标记点表面的反光材料将红外光反射回镜头,反射回的红外光经过信号处理,FPGA进行图像抓取和算法处理,从而获得反光标记点在镜头中的二维坐标。一套动捕系统里通常有多个动作捕捉镜头,多个镜头通过标定获取每个镜头的具体位置,从而得到三维坐标。

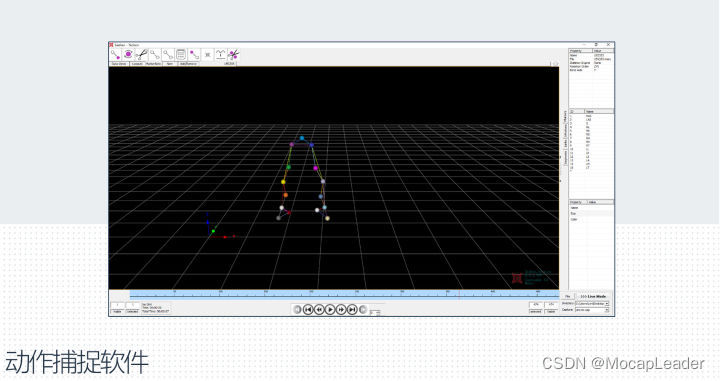
动作捕捉软件
动作捕捉操作及分析处理软件seeker,可结合系统中多个镜头获取的二维坐标以及每个镜头在空间中的位置信息,通过软件端的计算,得到六自由度(6Dof)、偏航角(Yaw)、横摇角(Roll)、俯仰角(Pitch)、欧拉角等数据。
同时具备实时处理,支持操作完成系统标定、校正及数据采集、导出工作,得到的数据可以通过VRPN传输,或通过SDK(C++语言)端口广播与ROS、Labview、Matlab(包含Simulink)等软件通信进行二次开发。
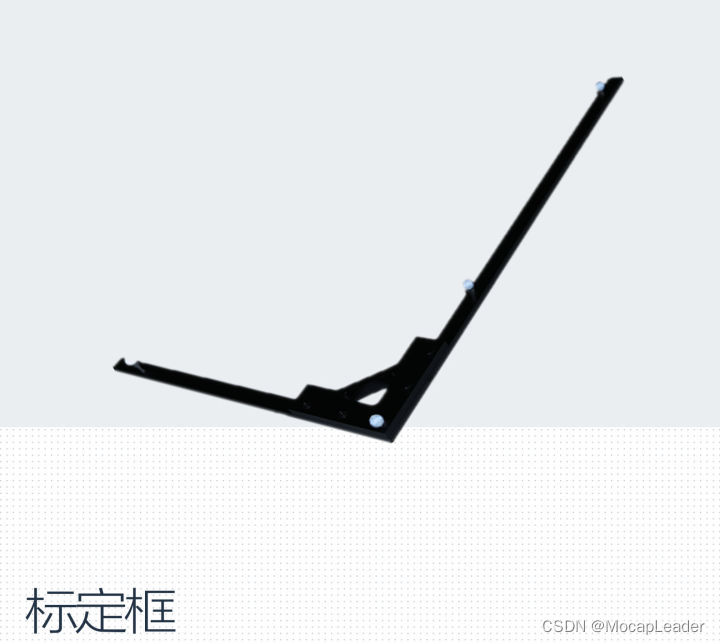
标定框
标定框是光学动作捕捉系统在校准时使用的标定工具。动作捕捉软件计算出镜头的准确空间位置和角度后,建立三维空间坐标(XYZ轴),通过L型标定工具,即标定框,确定空间中的X、Y、Z三个坐标轴的方向和原点位置,为精确的动作捕捉做好准备。
反光标识点
在光学动作捕捉系统中,被捕捉的目标上附着了能够反射红外光线的标识点(Marker),反光标识点表面的反光材料反射的红外光会被多个镜头上的感应器矩阵接收,进而获取相关数据。

连接线
即普通网线,采用数电同传技术,通过网线即可实现数据传输与供电。

POE交换机
在数据传输中,POE交换机通过网线接收光学动作捕捉镜头传输过来的三维位置数据,并传输到电脑上,以便利用动作捕捉软件对数据进行进一步的算法处理,从而获取三维坐标、加速度等运动数据,POE交换机同时也可通过网线对镜头进行供电。

镜头固定装置
包含三脚架、云台、大力夹等。 三脚架可在缺少安装条件、较为空旷的场景使用,大力夹和云台同样用于适应多种环境条件下的镜头固定。

(选配)动作捕捉服
动作捕捉服可使反光标识点固定在人体表面。常用于影视动画、虚拟现实、运动分析、步态康复等领域。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)