一. 添加传感器插件
(1)在rrbot.xacro中添加< link/>和< joint/>,内容如下:
<joint name="camera_joint" type="fixed">
<axis xyz="0 1 0" />
<origin xyz="${camera_link} 0 ${height3 - axel_offset*2}" rpy="0 0 0"/>
<parent link="link3"/>
<child link="camera_link"/>
</joint>
<!-- Camera -->
<link name="camera_link">
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="${camera_link} ${camera_link} ${camera_link}"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="${camera_link} ${camera_link} ${camera_link}"/>
</geometry>
<material name="red"/>
</visual>
<inertial>
<mass value="1e-5" />
<origin xyz="0 0 0" rpy="0 0 0"/>
<inertia ixx="1e-6" ixy="0" ixz="0" iyy="1e-6" iyz="0" izz="1e-6" />
</inertial>
</link>
上面是用于rviz加载
(2)在rrbot.gazebo中添加如下内容:
<!-- camera -->
<gazebo reference="camera_link">
<sensor type="camera" name="camera1">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<!-- Noise is sampled independently per pixel on each frame.
That pixel's noise value is added to each of its color
channels, which at that point lie in the range [0,1]. -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>rrbot/camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link_optical</frameName>
<!-- setting hackBaseline to anything but 0.0 will cause a misalignment
between the gazebo sensor image and the frame it is supposed to
be attached to -->
<hackBaseline>0.0</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
<CxPrime>0</CxPrime>
<Cx>0.0</Cx>
<Cy>0.0</Cy>
<focalLength>0.0</focalLength>
</plugin>
</sensor>
</gazebo>
<gazebo reference="camera_link">
首先这个link的名字必须与我们添加到xacro文件中的canera的link匹配。
<sensor type="camera" name="camera1">
其次传感器的名字必须是唯一的,除了在gazebo插件中,这个名字不能用在其它地方。
<update_rate>30.0</update_rate>
这是在仿真期间传感器尝试刷新的最大频率,但是当物理仿真速度快于传感器生成的速度时,它会低于这个目标值。
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
上面的取值是与自身相机物理硬件的规格相匹配。而< near>和< far>表示的是相机可以看到物体的最近和最远距离。
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
这个是实际文件gazebo_ros/gazebo_ros_camera.cpp所要链接的。
<cameraName>rrbot/camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
这里定义的是相机发布的话题。对于rrbot,我们所要订阅的话题为:
/rrbot/camera1/image_raw
/rrbot/camera1/camera_info
二. 运行launch文件
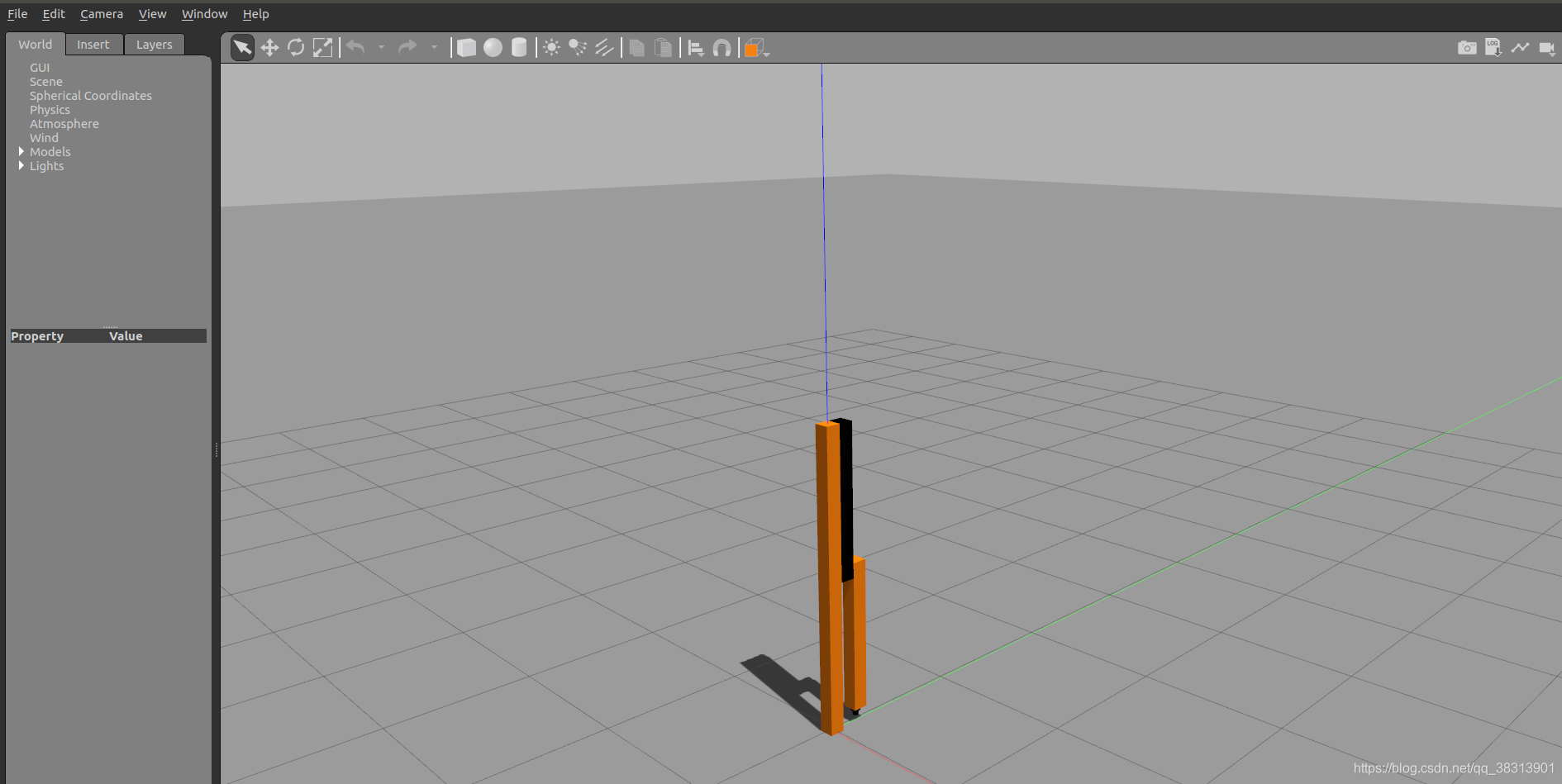
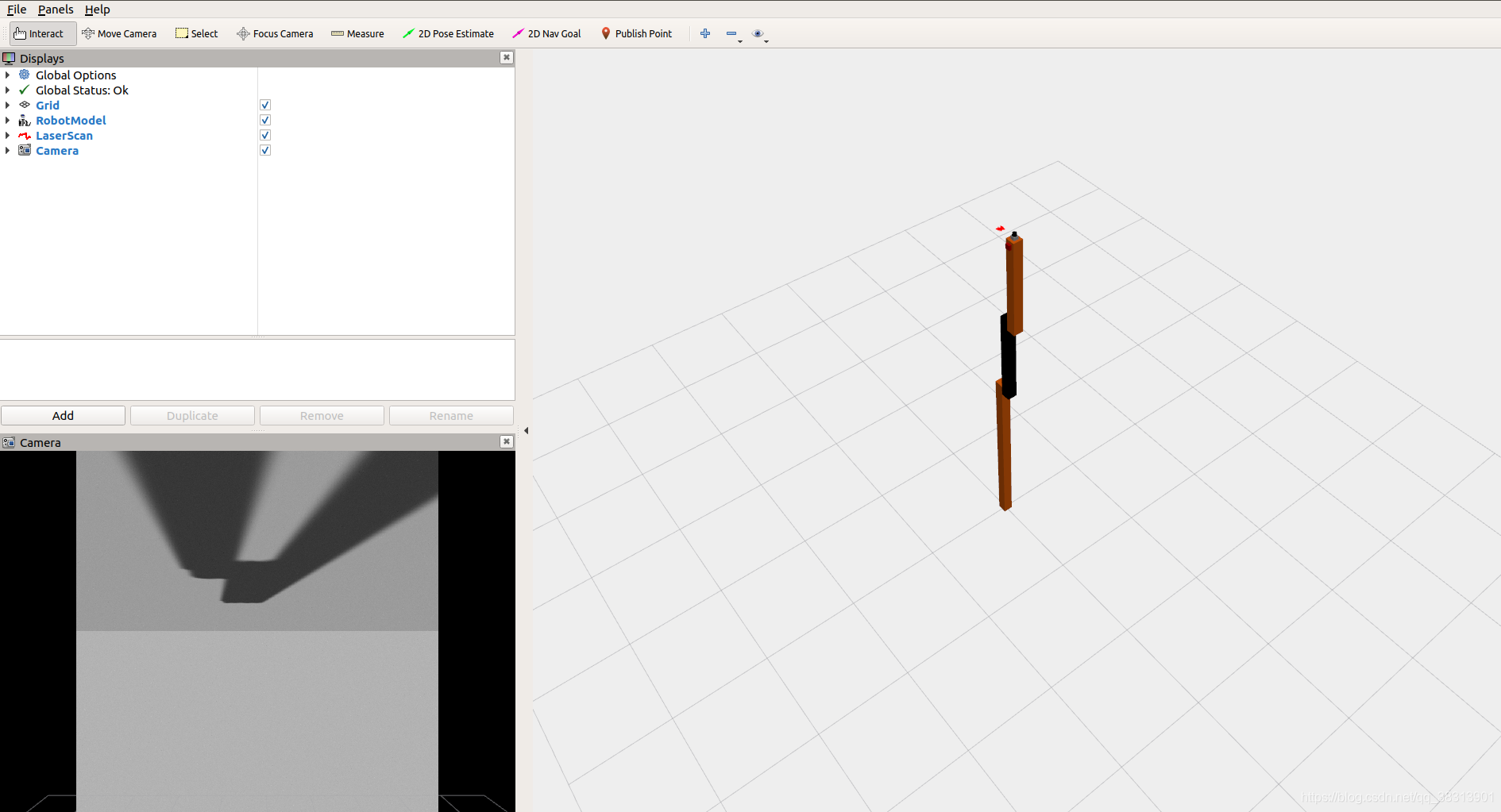
roslaunch rrbot_gazebo rrbot_world.launch
roslaunch rrbot_description rrbot_rviz.launch
结果如下图:
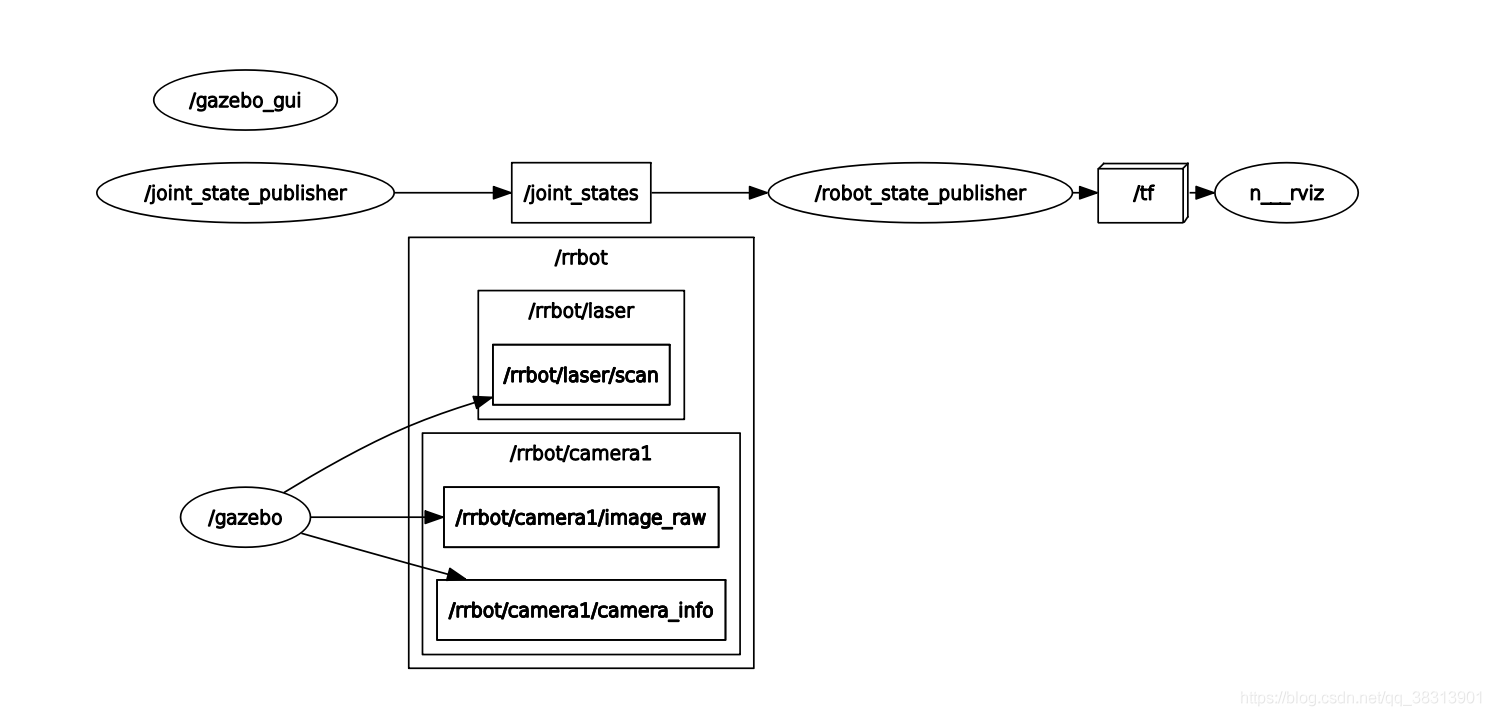
运行rqt_graph,显示节点图:
可以看出gazebo和rviz中的机器人状态不一致。
此时加载的rrbot_world.launch的内容如下:
<launch>
<!-- these are the arguments you can pass this launch file, for example paused:=true -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find rrbot_gazebo)/worlds/rrbot.world"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- Load the URDF into the ROS Parameter Server -->
<param name="robot_description"
command="$(find xacro)/xacro --inorder '$(find rrbot_description)/urdf/rrbot.xacro'" />
<!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model rrbot -param robot_description"/>
</launch>
rrbot_rviz.launch的内容如下:
<launch>
<param name="robot_description"
command="$(find xacro)/xacro --inorder '$(find rrbot_description)/urdf/rrbot.xacro'" />
<!-- send fake joint values -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="use_gui" value="true"/>
</node>
<!-- Combine joint values -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"/>
<!-- Show in Rviz -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find rrbot_description)/launch/rrbot.rviz"/>
</launch>
对于添加激光雷达插件是一样的原理。
参考:
http://gazebosim.org/tutorials?tut=ros_gzplugins
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)