F
−
k
x
−
c
x
˙
=
m
x
¨
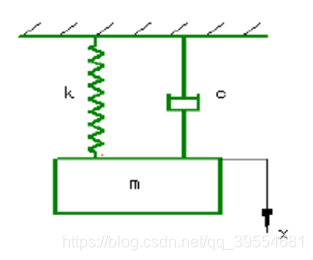
F-kx-c\dot{x}=m\ddot{x}
F−kx−cx˙=mx¨
F
F
F为施加在质量块上的外力,写成传递函数的形式即为:
X
(
s
)
F
(
s
)
=
1
m
s
2
+
c
s
+
k
=
1
k
1
m
k
s
2
+
c
k
s
+
1
\frac{X(\mathrm{s})}{F(\mathrm{s})}=\frac{1}{m s^{2}+c s+k}=\frac{1}{k} \frac{1}{\frac{m}{k} s^{2}+\frac{c}{k} s+1}
F(s)X(s)=ms2+cs+k1=k1kms2+kcs+11
ω
n
=
k
m
,
ζ
=
c
2
k
m
k
\omega_{n}=\sqrt{\frac{k}{m}}, \zeta=\frac{c}{2 k} \sqrt{\frac{m}{k}}
ωn=mk,ζ=2kckm
G
(
s
)
=
1
(
s
/
ω
n
)
2
+
2
ζ
(
s
/
ω
n
)
+
1
G(s)=\frac{1}{\left(s / \omega_{n}\right)^{2}+2 \zeta\left(s / \omega_{n}\right)+1}
G(s)=(s/ωn)2+2ζ(s/ωn)+11
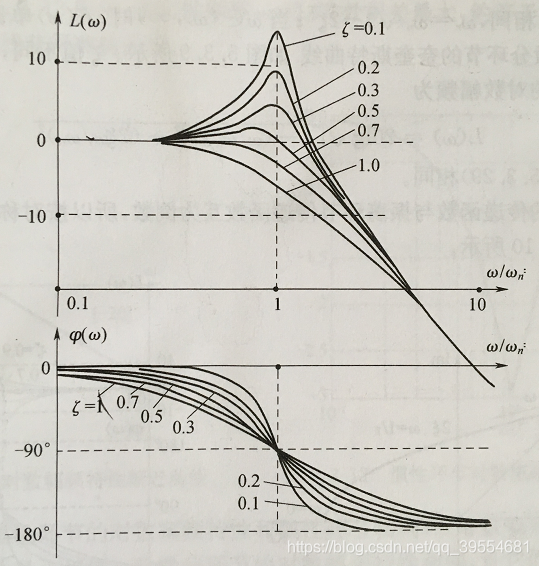
可以看出,增加质量
m
m
m后,系统的自然频率
ω
n
\omega_{n}
ωn减小了,这意味着系统的截止频率降低了,对高频噪声的滤除作用提高了。这相当于物理系统对传感器的初始数据做了低通滤波,这将有效提升传感器数据的稳定性。
实际上,应该使机体固有的震动频率处于减震系统的阻带中,并尽可能地远离谐振峰值,起到对机体振动的衰减,一般取
f
f
0
=
2.5
−
4.5
\frac{f}{f_0}=2.5-4.5
f0f=2.5−4.5,其中
f
f
f为机体的固有频率,
f
0
f_0
f0为减震系统的自然频率。
因此添加配重质量块可有效滤除机体高频振动带来的高频噪声。与此同时,我们希望IMU+减震海绵这个系统在受到外界的扰动后其振动状态能迅速收敛至零,这就需要增加系统的阻尼比;可以看到
ζ
=
c
2
k
m
k
\zeta=\frac{c}{2 k} \sqrt{\frac{m}{k}}
ζ=2kckm,而
c
,
k
c,k
c,k决定了减震海绵的软硬。