GPS定位基本原理 GPS测量定位方法分类 定位模式: 绝对定位(单点定位) 相对定位 差分定位 定位时接收机天线的运动状态: 静态定位-天线相对于地固坐标系静止 动态定位-天线相对于地固坐标系运动 获得定位结果的时效: 事后定位 实时定位 观测值类型: 伪距测量 载波相位测量
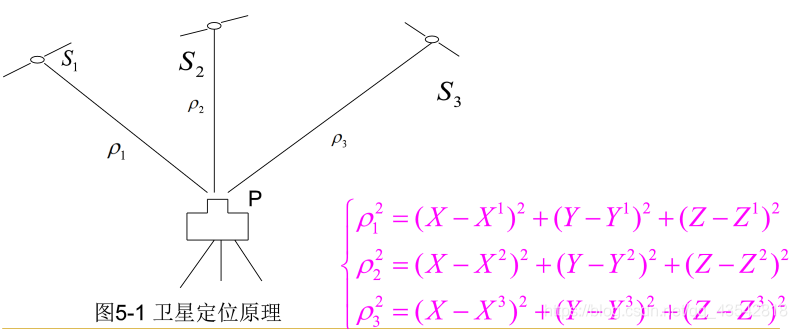
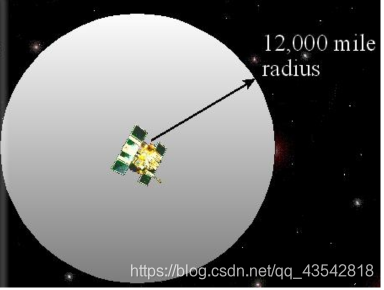
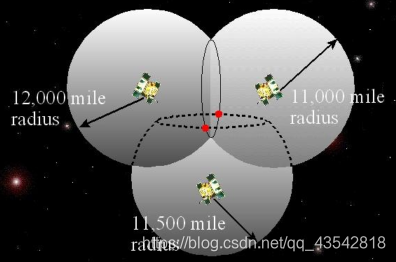
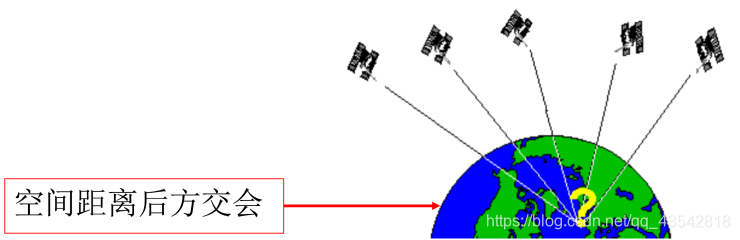
一个站星距离 测站位于以卫星为球心,站星距离为半径的球面上 两个站星距离 构成两个球面 两个球面相交为圆 测站位于圆圈上 三个站星距离 构成三个球面 三个球面两两相交 测站位于其中任意一点 三个站星距离+地球表面=一点
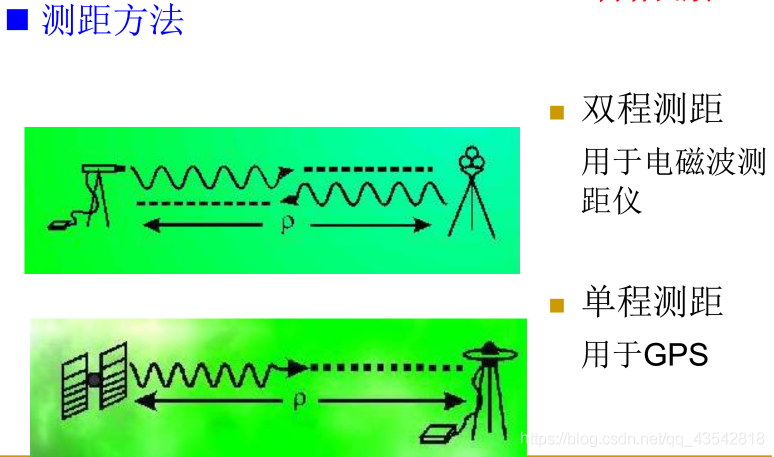
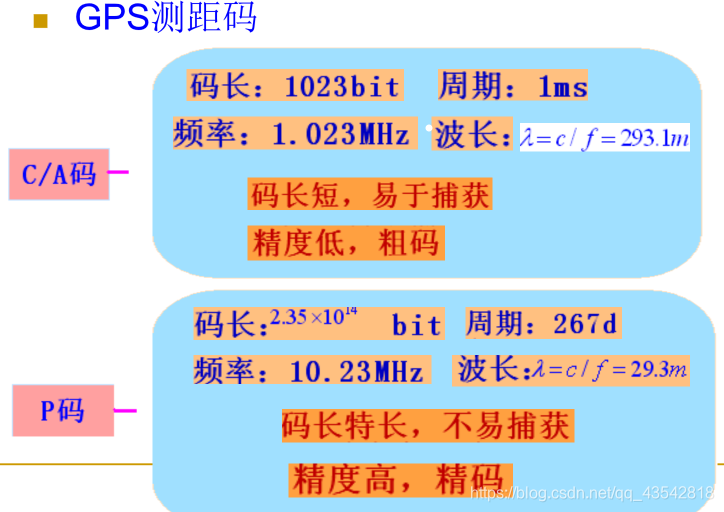
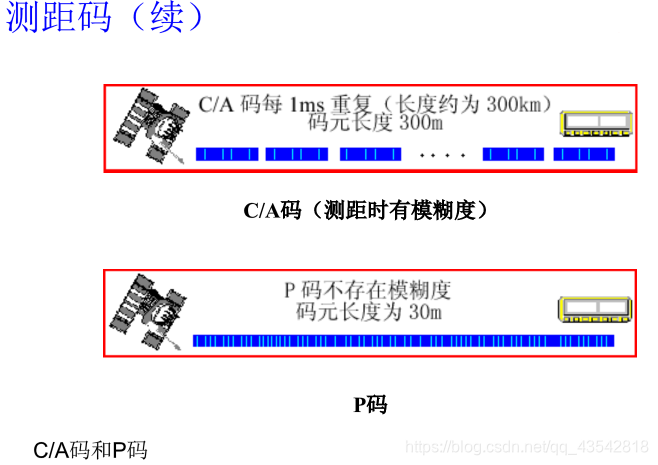
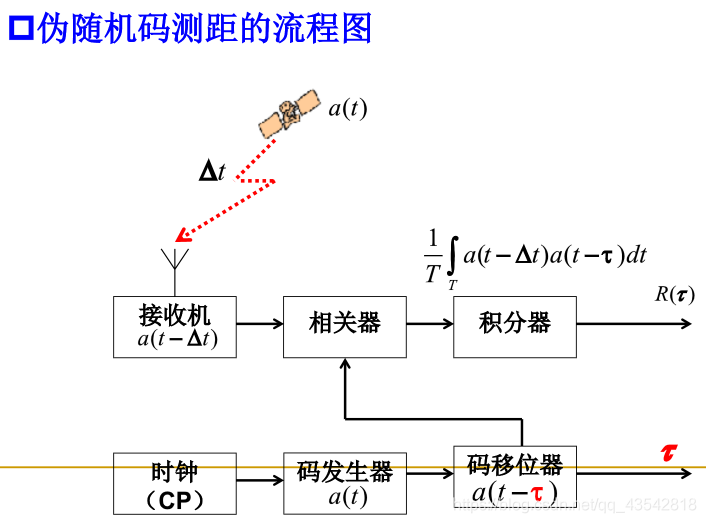
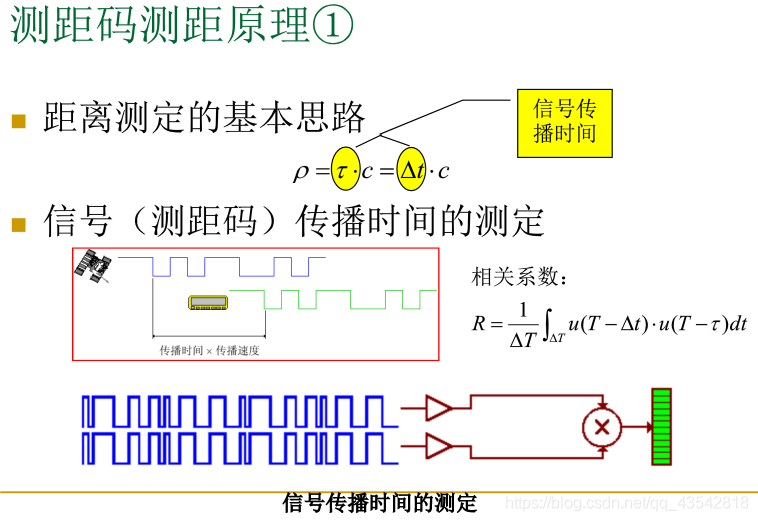
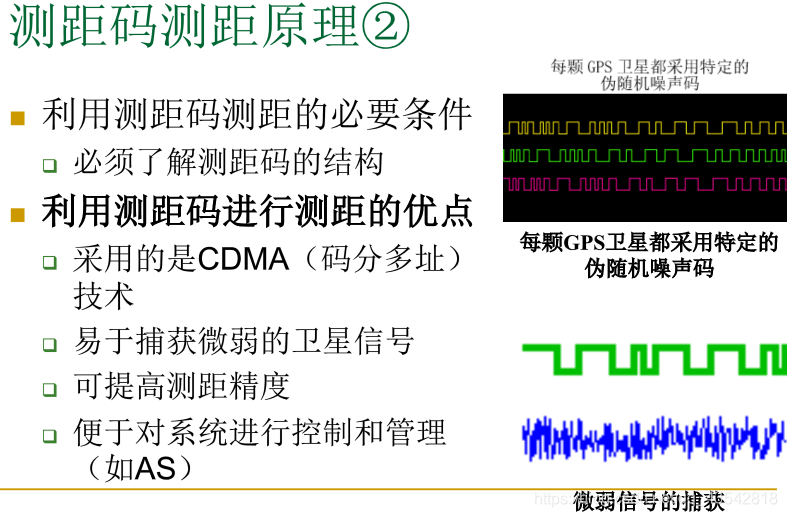
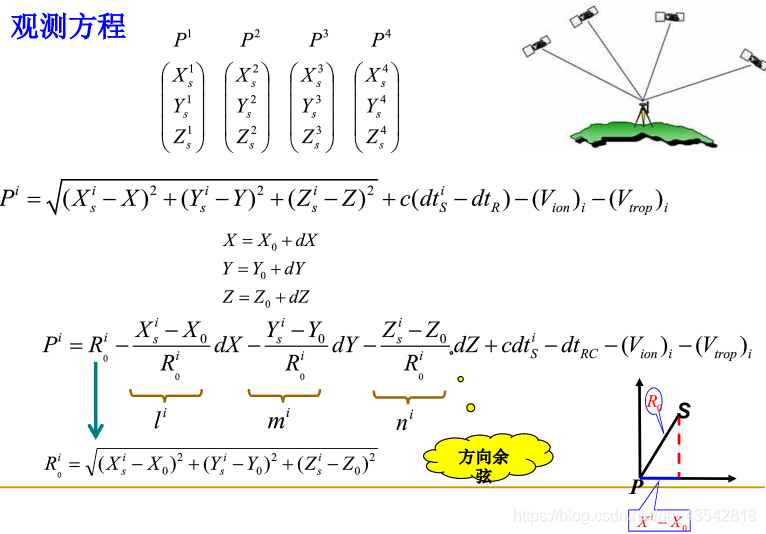
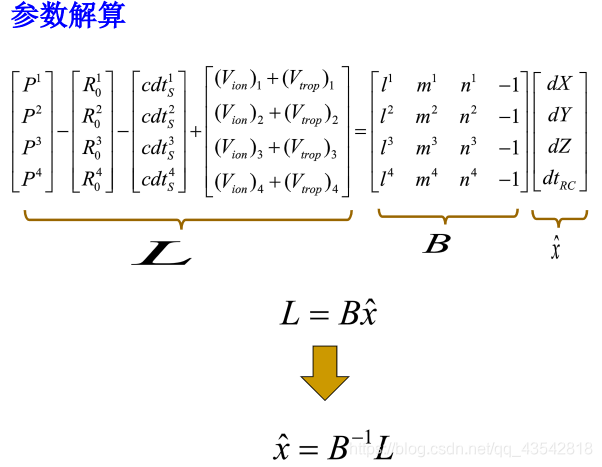
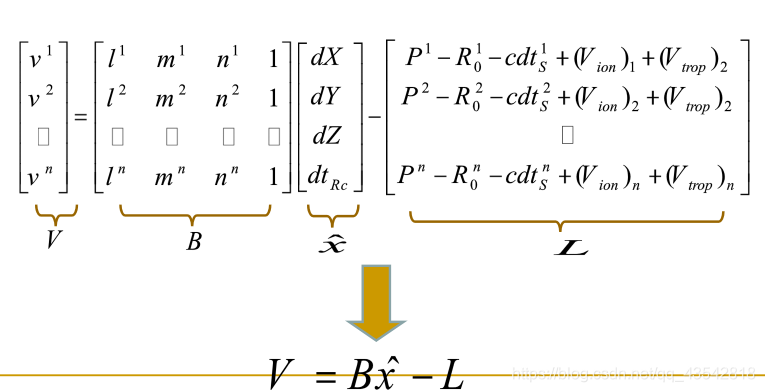
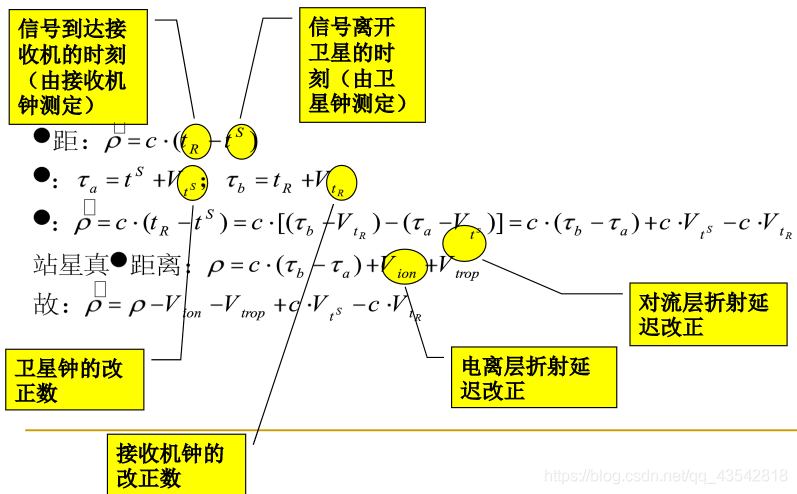
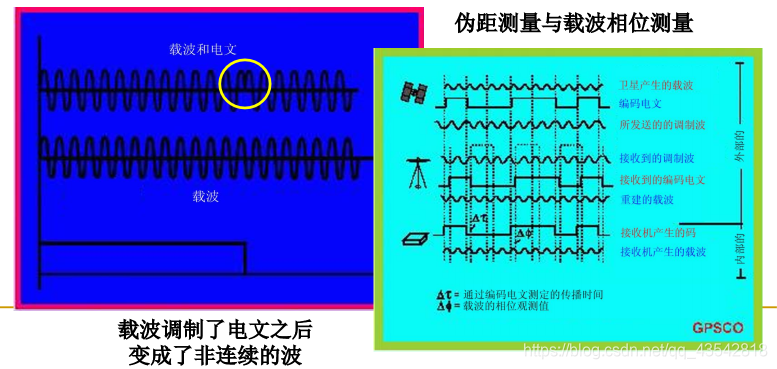
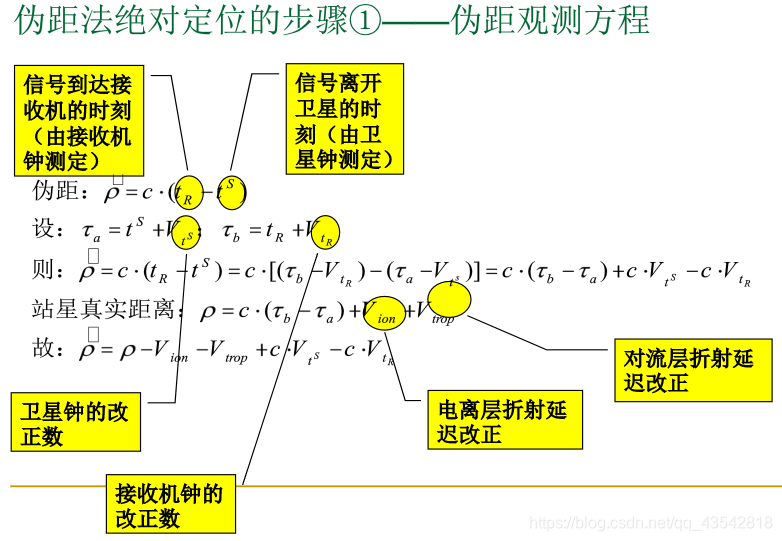
**伪距概念:**就是由卫星发射的测距码信号到达GPS接收机的传播时间 码相关伪距测量原理: 1.卫星依据自己时钟(钟脉冲)发出某一结构的测距码,经过Δt时的传播到达GPS接收机。 2.接收机在自己钟脉冲驱动下,产生一组结构完全形图的复制码。 3.通过时延器使之延迟时间τ,对两码进行相关比较。 4.直至两码完全对齐,相关系数R(t)=max=1,则该事件延迟τ即为传播时间Δt(τ=Δt) 5.距离ρ=c•Δt=c•τ。 为什么采用码相关技术来确定伪距? GNSS卫星发出的测距码是按照某一规律排列的,在一周期内每个码对应某一特定的时间。应该说识别每个码的形状特征,即用每个码的某一标志即可推出时延值Δt进行伪距测量。 GPS伪随机码的特性 伪距定位数学模型(四颗星) 伪距定位观测方程(另一种推导方式) 伪距测量的特点 优点:无模糊度 缺点:精度低
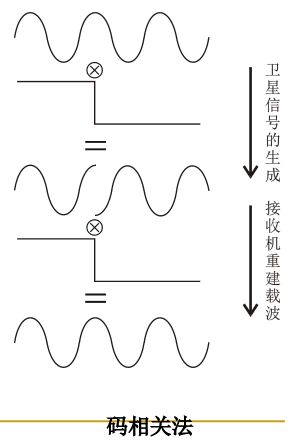
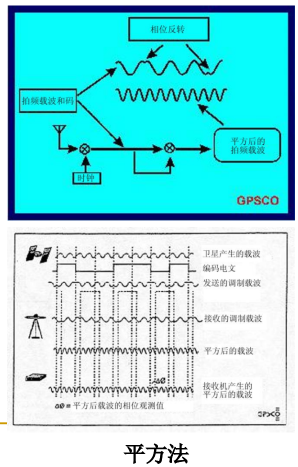
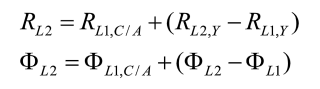
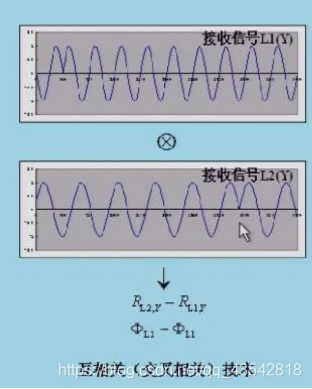
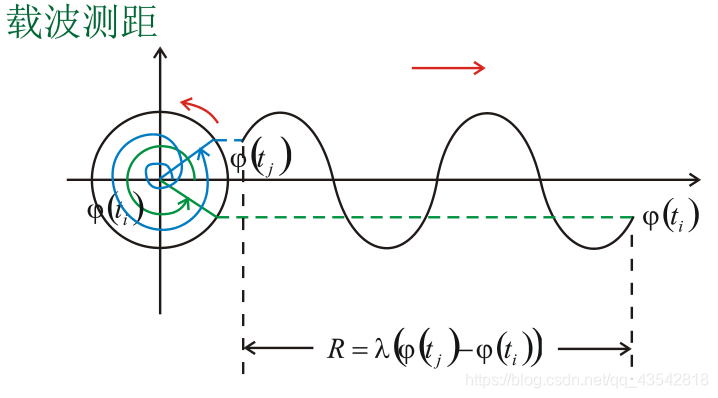
为什么采用载波相位测量? 1.测距码测距精度对于一些高精度的应用无法满足。 2.载波的波长短,所以就可达到很高的精度。 载波相位测量的特点 优点:精度高,测距精度可达0.1mm量级。 难点:整周未知数问题;整周跳变问题。 载波相位测量的关键技术—重建载波 重建载波:将非连续的载波信号恢复成连续的载波信号。 码相关法: 方法: 将所接收的调制信号(卫星信号)与接收机产生的复制码相乘。 技术要点:卫星信号(弱)与接收机信号(强)相乘 特点: 限制:需要了解码的结构 优点:可获得导航电文,可获得全波长的载波,信号质量好(信噪比高) 平方法: 方法: 将所接收到的调制信号(卫星信号)自乘 技术要点:卫星信号(弱)自乘 特点: 优点: 无需了解码的结构 缺点: 无法获得导航电文,所获载的波波长比原来波长的一半,信号质量较差(信噪比低,降低了30dB) 互相关(交叉相关) 方法:在不同频率的调制信号(卫星信号)进行相关处理,获取两个频率间的伪距差和相位差 技术要点: 不同频率的卫星信号(弱)进行相关 特点: 优点: 无需了解Y解码的结构,可获得导航电文,可获得全波波长的载波,信号质量较平方法好(信噪比降低了27dB) Z跟踪 方法:将卫星信号在一个W码码元内与接收机复制出的P码进行相关处理 技术要点:在一个W码码元内进行卫星信号(弱)与复制信号(强)进行相关 特点:无需了解Y码结构,可测定双频伪距观测值,可获得导航电文,可获得全波波长的载波,信号质量较平方法好(信噪比降低14dB)
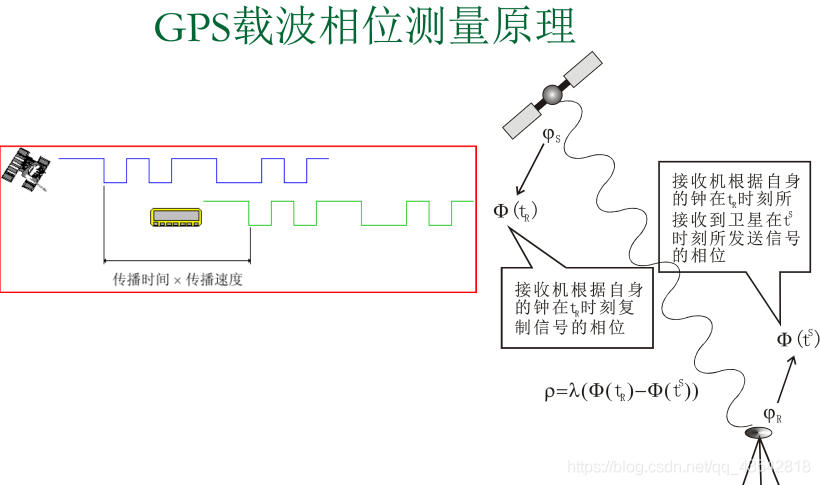
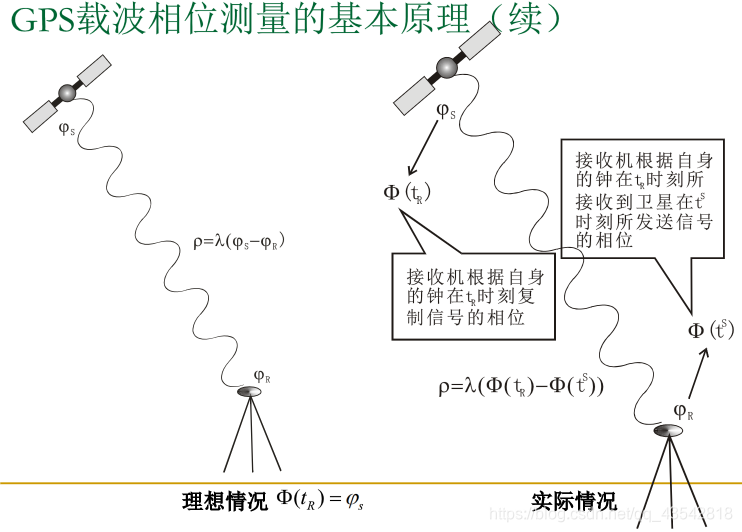
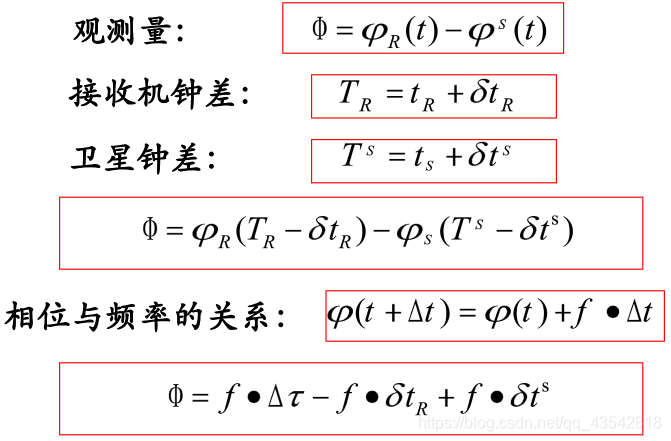
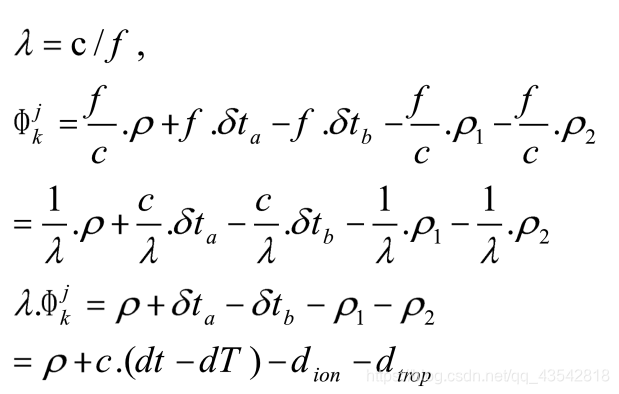
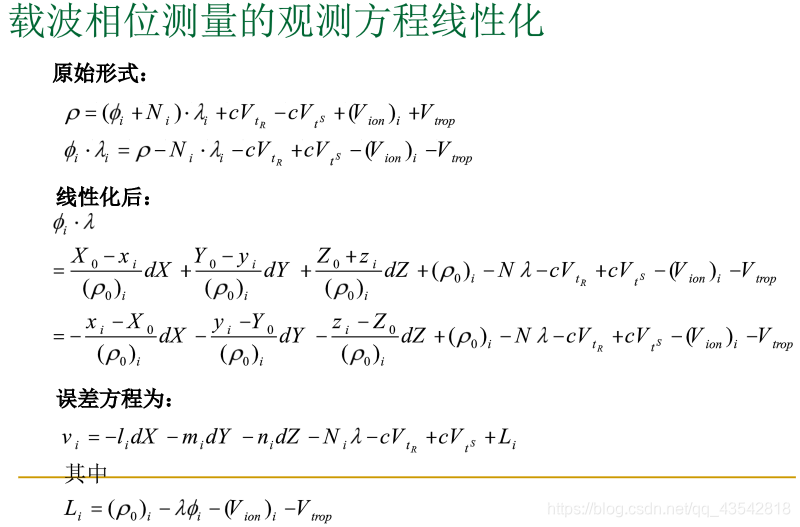
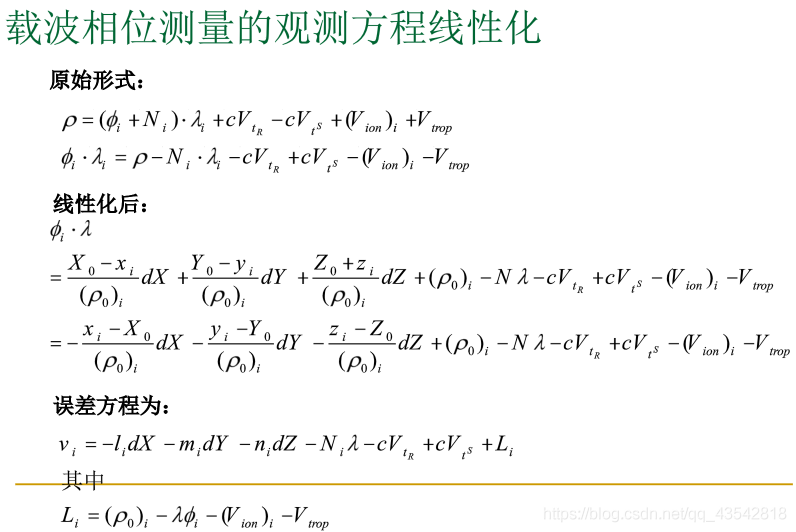
载波相位观测的观测量定义:是GNSS接收机所接收的卫星载波信号与接收机本振擦模考信号的相位差。 载波相位测量和伪距测量的比较 相同点:距离交会定位 不同点: 1.伪距定位通过测距码测距,载波相位定位通过载波相位定位。 2.伪距定位数据处理简单,精度低,载波相位定位数据处理复杂,精度高。 伪距测量与载波相位测量的观测方程的联系:
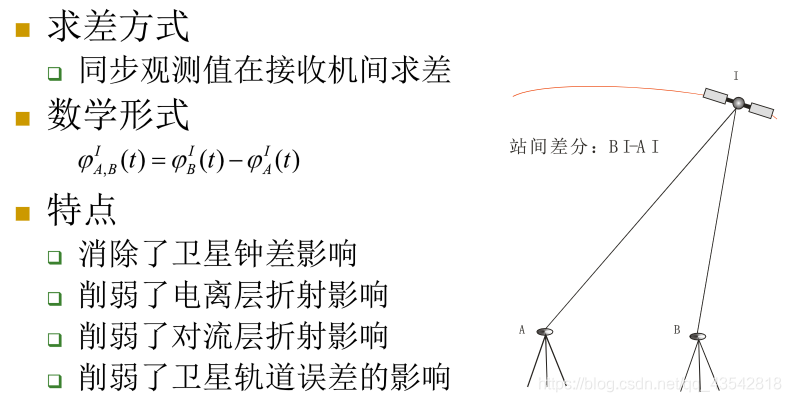
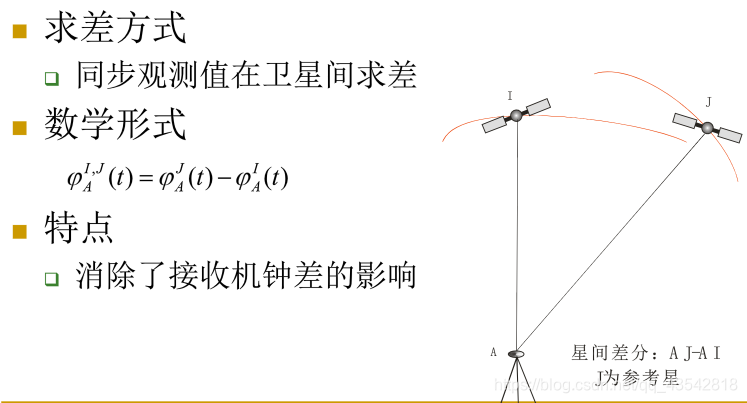
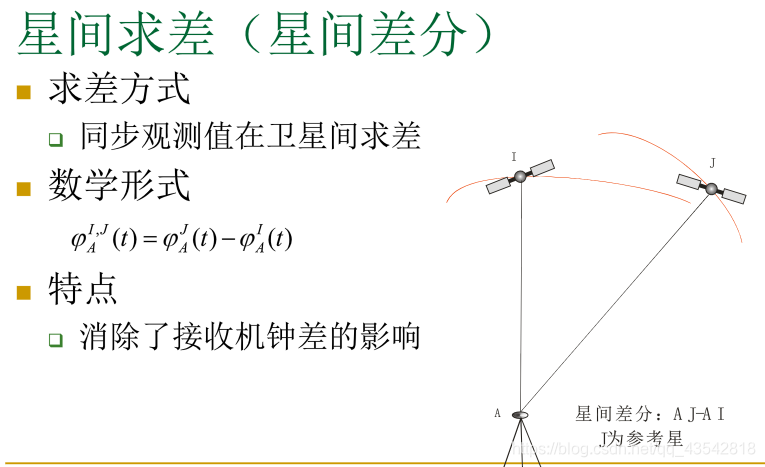
概述 定义:确定进行同步观测的接收机之间相对位置的定位方法,称为相对定位。 差分观测值的定义:将相同频率的GPS载波相位观测值依据某种方式求差所获得的新的组合观测值(虚拟观测值) 定位结果:与所用星历同属于一坐标系的基线向量(坐标差)及其精度信息。 采用广播星历时属WGS-84 采用IGS- International GPS Service精密星历时ITRF- International Terrestrial Reference Frame 基线向量中含有:2个方位基准(一个水平方法个垂直方位)和1个尺度基准,不含有位置基准。 优点:定位精度高 缺点:多态接收共同作业,作业复杂;数据处理复杂;不饿能直接获取绝对坐标。 应用:高精度测量定位及导航 观测值之间的线性组合:利用观测量的不同组合(求差)进行相对定位,可以有效的消除误差。 差分观测值的特点:可以消去某些不重要的参数,或将某些对确定待定参数由较大负卖你影响的因素消去或消弱其影响。 求差方式:站间求差;卫星间求差;历元间求差
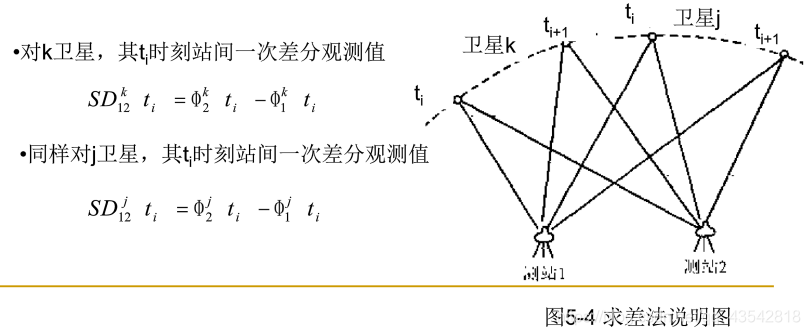
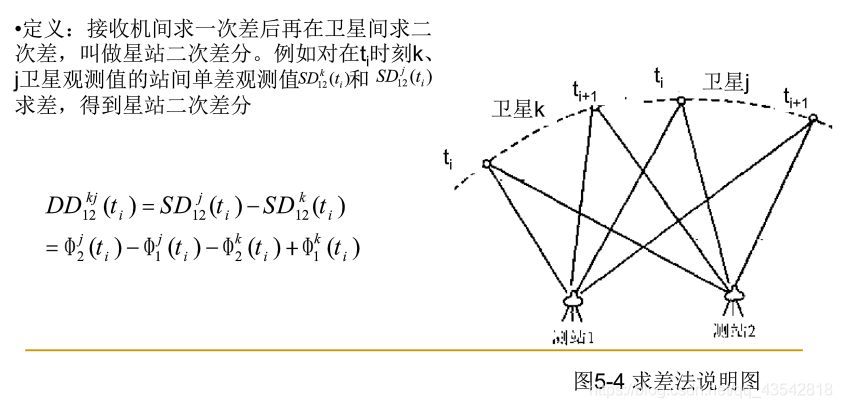
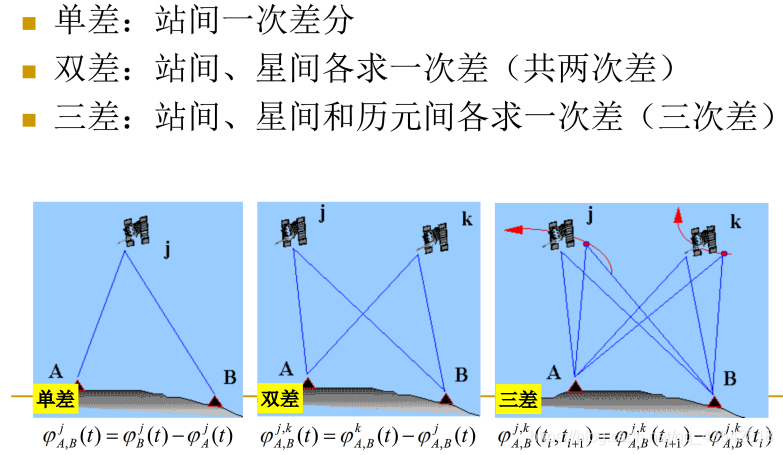
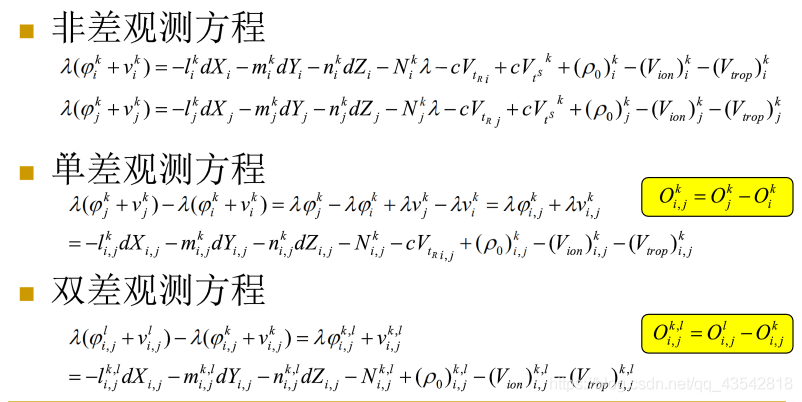
**站间求差:**GPS载波相位观测值可以在卫星间求差,在接收机间求差也可以在不同历元间求差。将观测值直接相减的过程叫做一次差。 二次差或双差——卫星间求差 星间求差(星间差分)
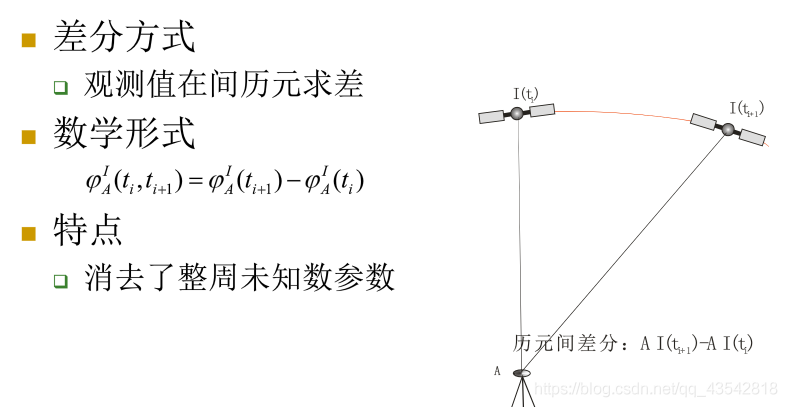
三差——历元间求差 单插、双差和三差 采用差分观测值的缺陷: 数据利用率低:只有同步数据才能进行差分 引入基线矢量代替了位置矢量 差分观测值间具有了相关性,是处理问题复杂化:参数估计时,观测值的权阵 某些参数无法求出:某些信息在差分观测值钟被消除
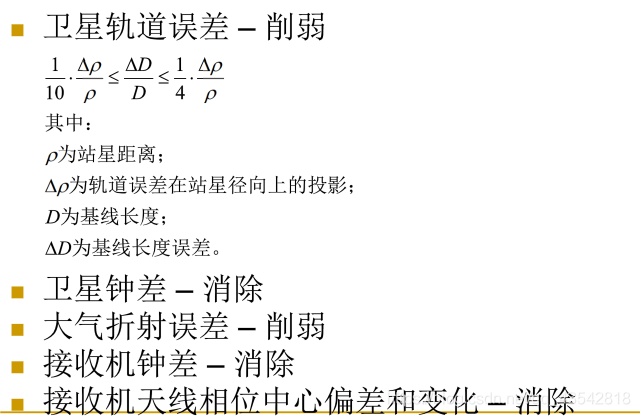
观测方程的线性化及平差模型 各种误差对相对定位结果的影响
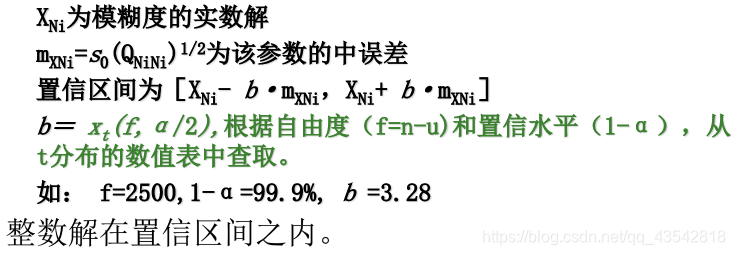
待定参数法—经典方法 1.取整法 2.置信区间法 3。模糊函数法 整数解: 基本方法: 1.求初始解:确定基线向量的实数解和整周未知数的实数解 2.将整周模糊度固定为整数 3.求固定解 实数解:基线较长,误差相关性减弱,初始解的误差将随之增大,从而使模糊度参数很难固定,整数化的意义不大。
走走停停和快速静态定位法是两种具有代表性的快速定位法。 确定整周未知数的方法: 1.走走停停法 已知基线法:将已修复周跳、提出粗差后的双差载波相位观测值组成法方程式。然后将已知的基线向量代入法方程并求解模糊度参数,最后再用取整法或置信区间法将得到的实数模糊度固定为整数。 交换天线法
2.快速静态定位法 快速模糊度解算法
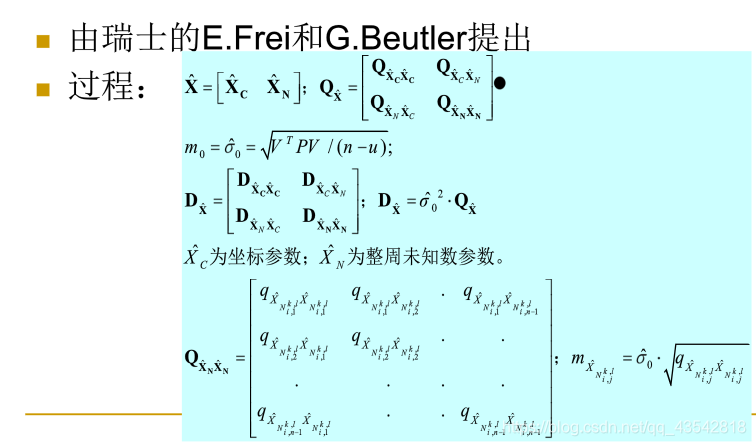
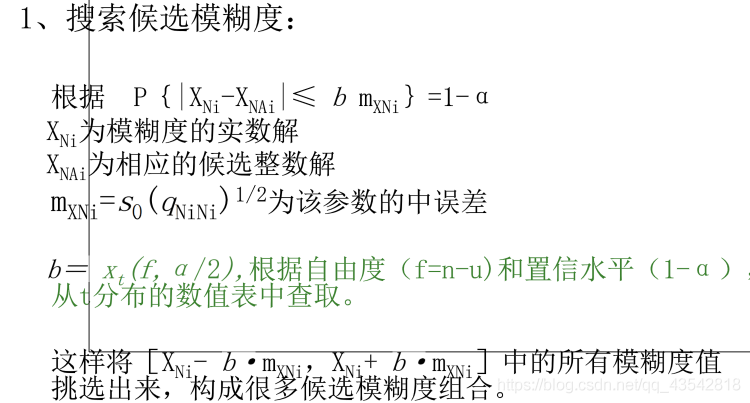
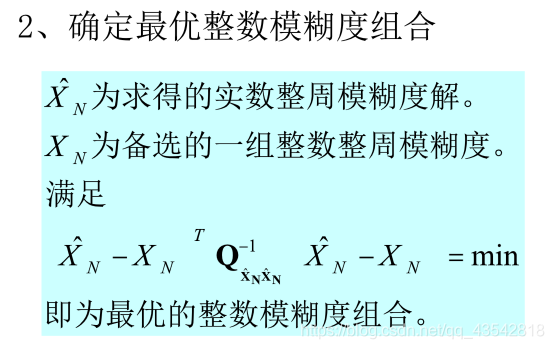
初始化法: 运动载体处于静止状态时与地面基准站一起通过”初始化“来确定整周模糊度,然后运动载体开始运动,进行定位。 实时阶段模糊度的方法: 1.确定搜素区域: 坐标搜索法 模糊度搜索法 2.可采用的方法 模糊度函数法 最小二乘模糊度搜索法 FARA法 会所模糊度搜索滤波法 LAMBDA法
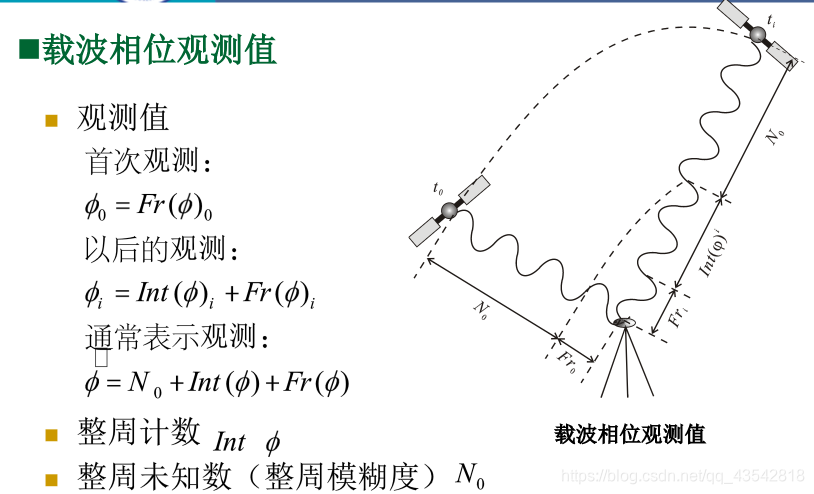
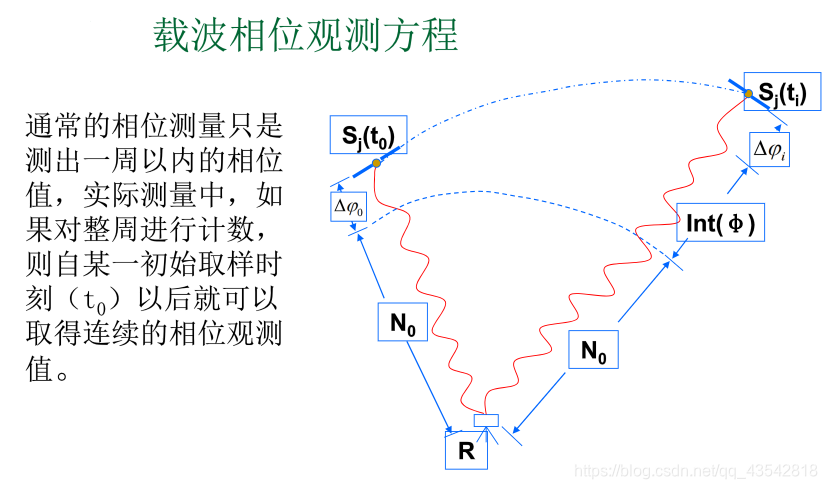
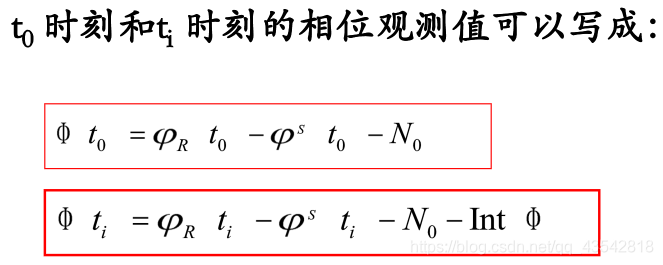
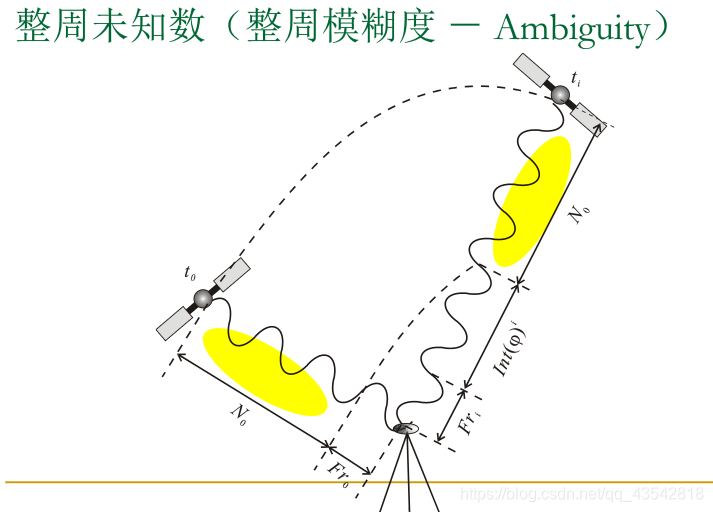
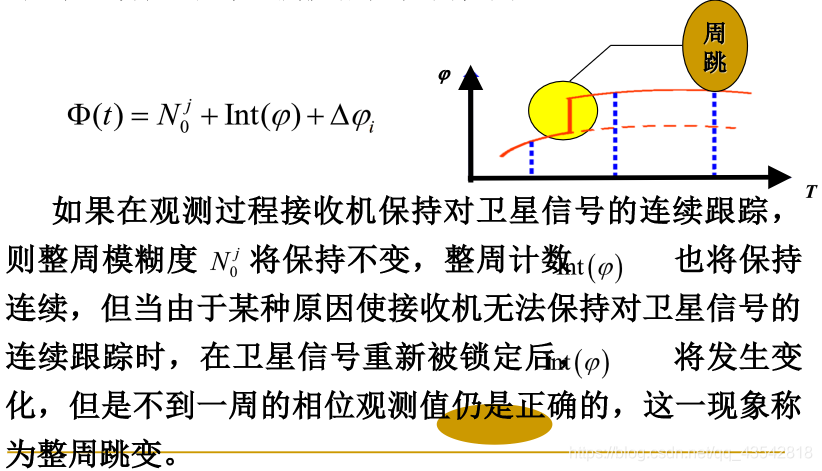
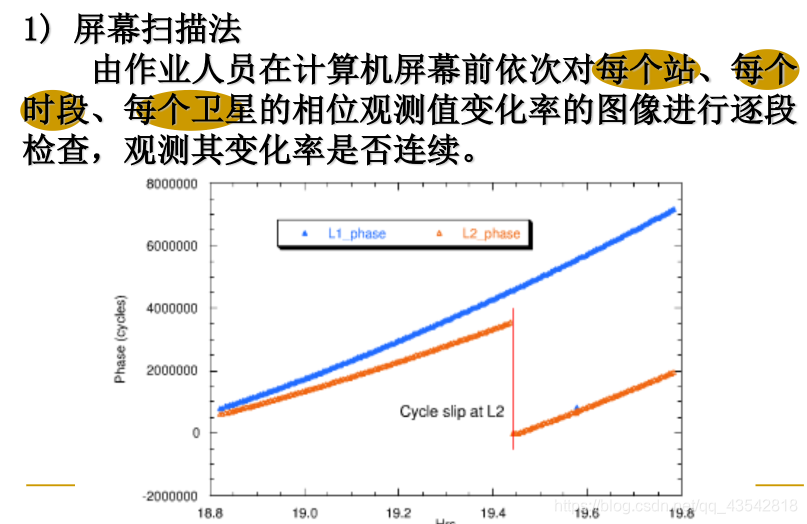
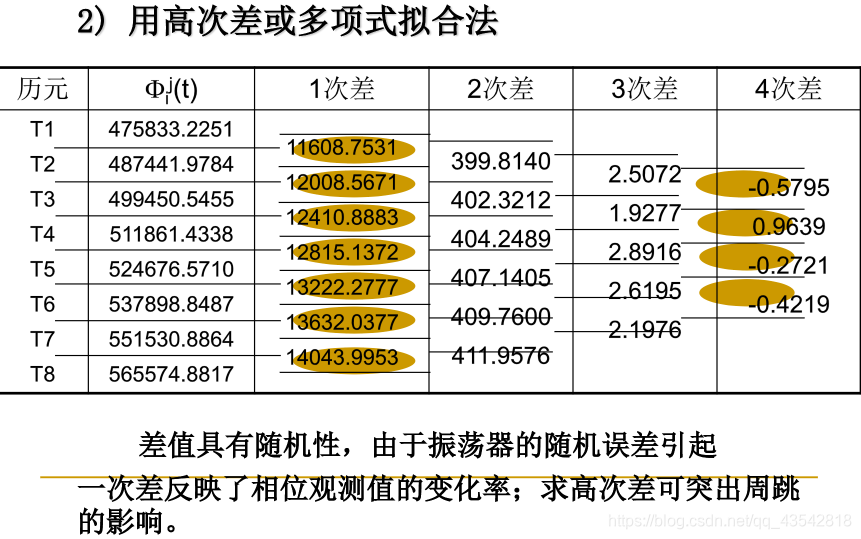
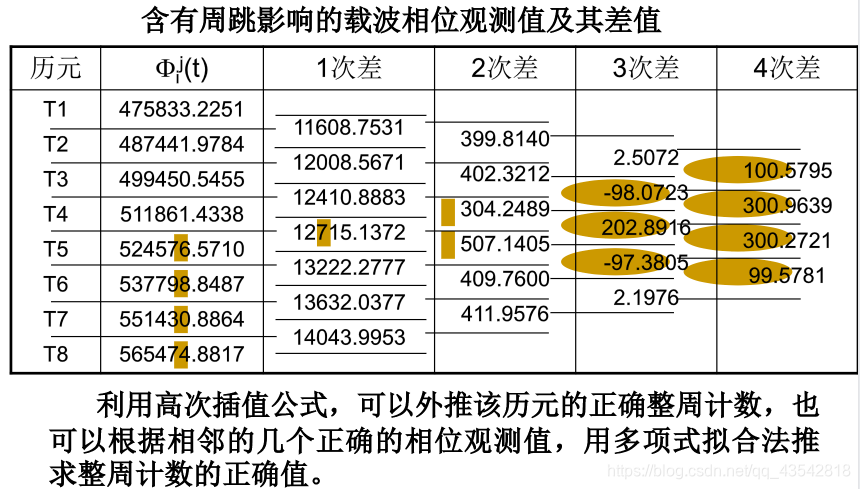
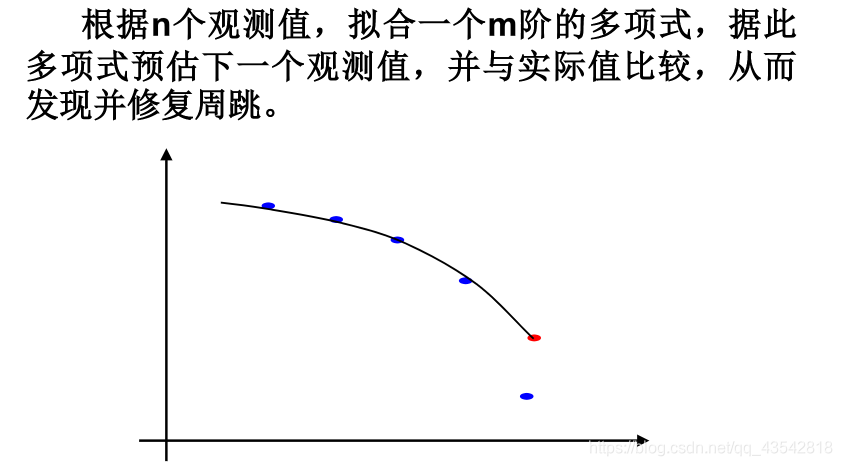
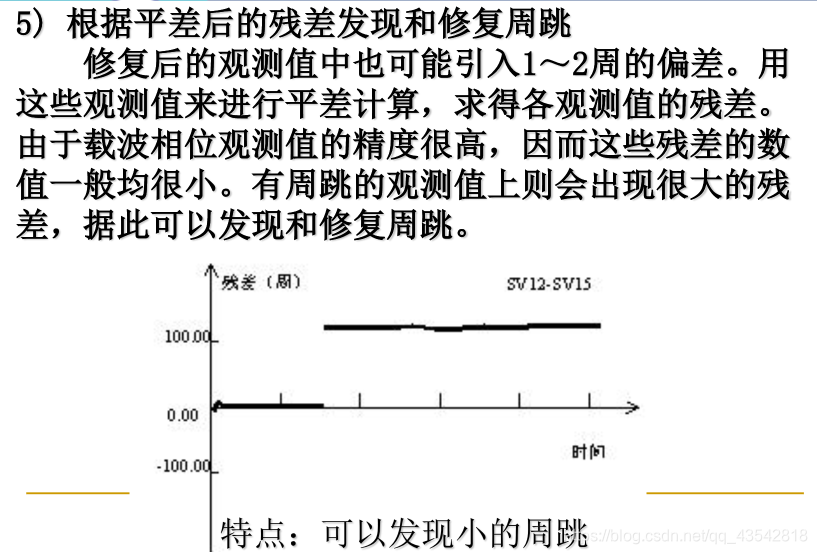
相关概念 整周跳变(周跳)——Int(φ)有误差。 信号失锁:由于GPS卫星信号被某些建筑物、障碍物暂时阻断,致使接收到的卫星信号产生中断。 在某一特定时刻的载波相位观测值为 整周跳变产生的原因 信号被遮挡,导致卫星信号无法连续跟踪 仪器故障,导致基准信号无法与卫星信号混频产生 由于外界干扰或接收机所处的动态条件恶劣(动态定位),使载波跟踪环路无法锁定信号 卫星信号信噪比过低,导致整周计数错误 卫星瞬时故障,无法产生信号 周跳的特性: 只影响整周计数-周跳为波长的整数倍 具有继承性:将影响从周跳发生时刻(历元)之后的所有观测值 周跳探测与修复的方法 整周跳变的修复: 在平差之前数据预处理阶段利用一定的探测方法探测出在何时产生了整周跳变,采取相应的模型确定丢失的整周数,将其恢复为正确的计数,这一过程称为整周跳变的修复。 基本思想: 载波相位观测值体现了卫地距离的变化,它应该是一个连续的变化量。 周跳的探测方法 检测周跳的几点说明: 1、检测周跳是个复杂的过程,需要上面各种方法的综合。 2、通常使用的时候,使用双差观测值进行探测。
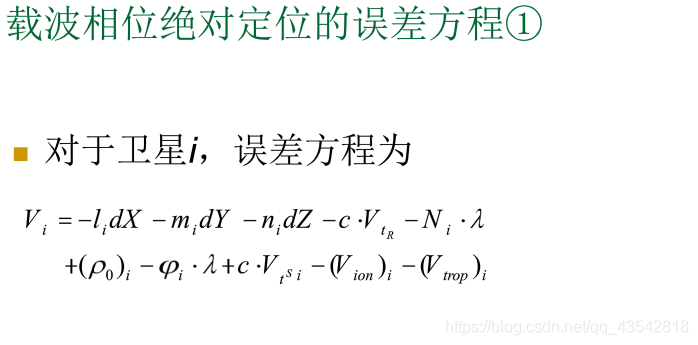
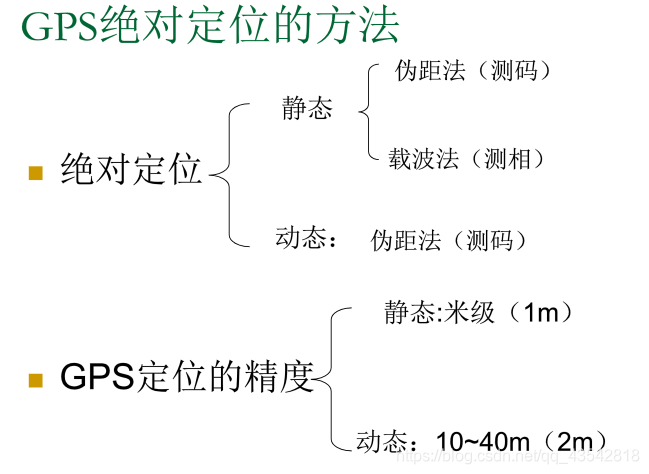
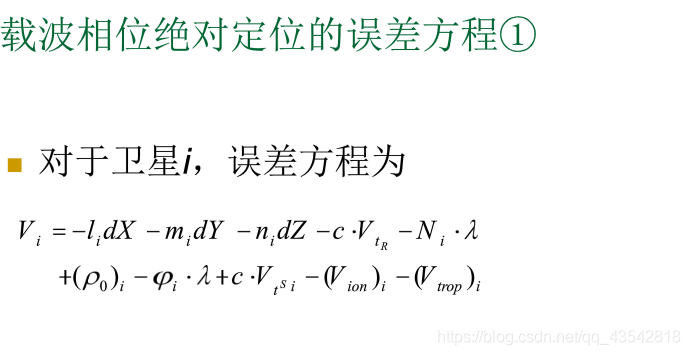
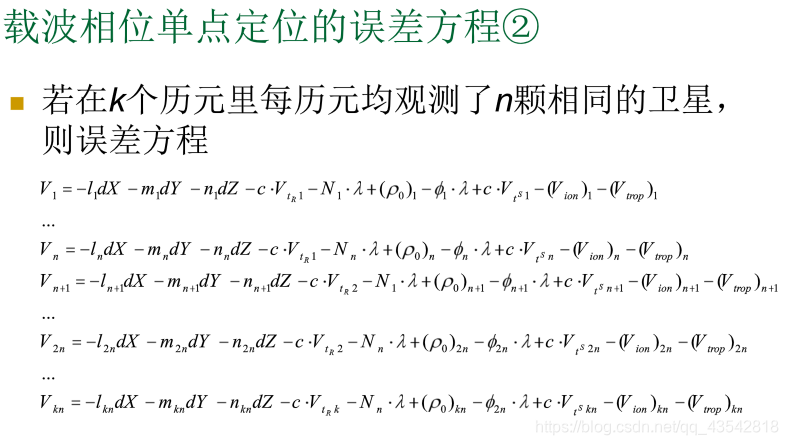
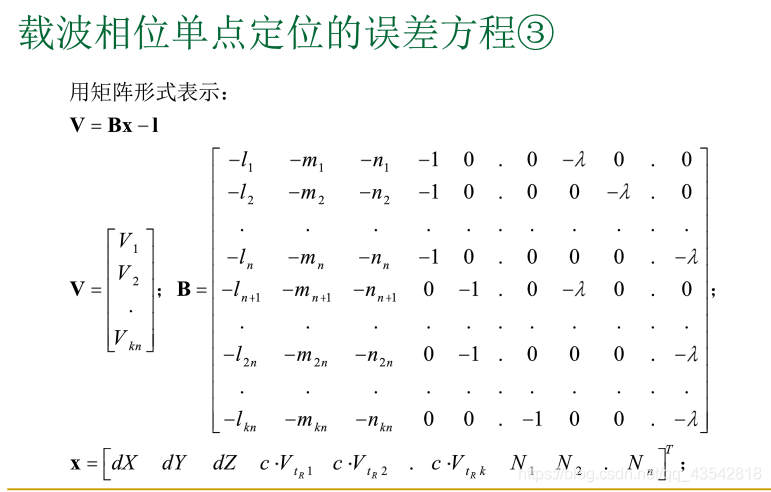
单点定位简介 定义:单独利用一台接收机确定待定点在地固坐标系中的绝对位置的方法 定位结果—与所用星历同属于同一坐标系的绝对坐标 特点 优点:一台接收机单独定位,观测简单,可瞬间定位 缺点:精度主要受系统性偏差的影响,定位精度低 应用领域:低精度导航、资源普查、军事。。。 绝对定位的实质 绝对定位:接收机天线处于静止状态下,确定观测站坐标的方法称为常态绝对定位。这时,可以连续地在不同历元同步观测不同的卫星,测定卫星至观测站的伪距,获得处分的多余观测量。测后通过数据处理求得观测站的绝对坐标。
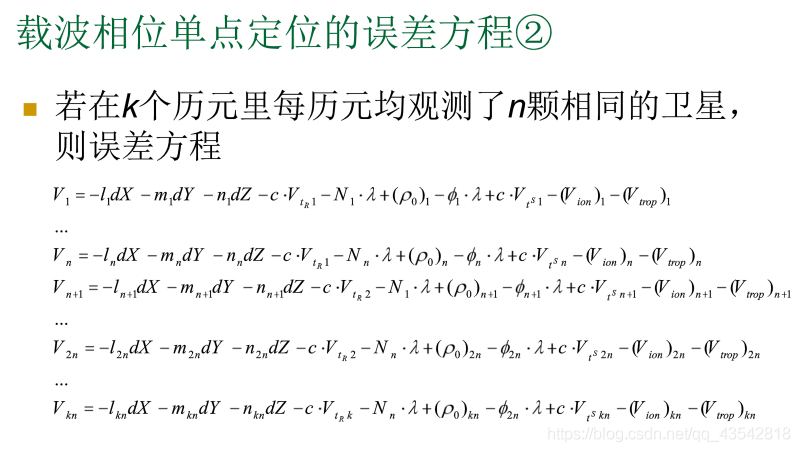
说明应用测相伪距法进行静态绝对定位时,由于存在整周不确定性,在同样观测4颗卫星的情况下,至少于3个不同历元对4颗相同卫星进行同步观测。当观测时间较短,定位精度要求不高时,可把接收机钟差视为常数。
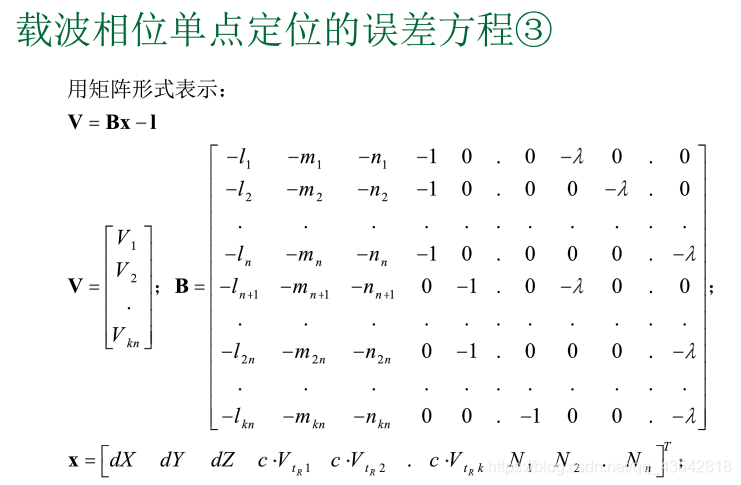
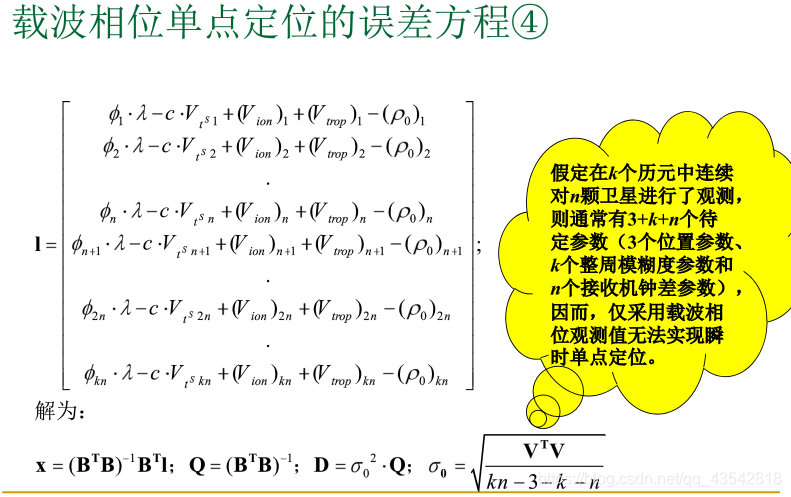
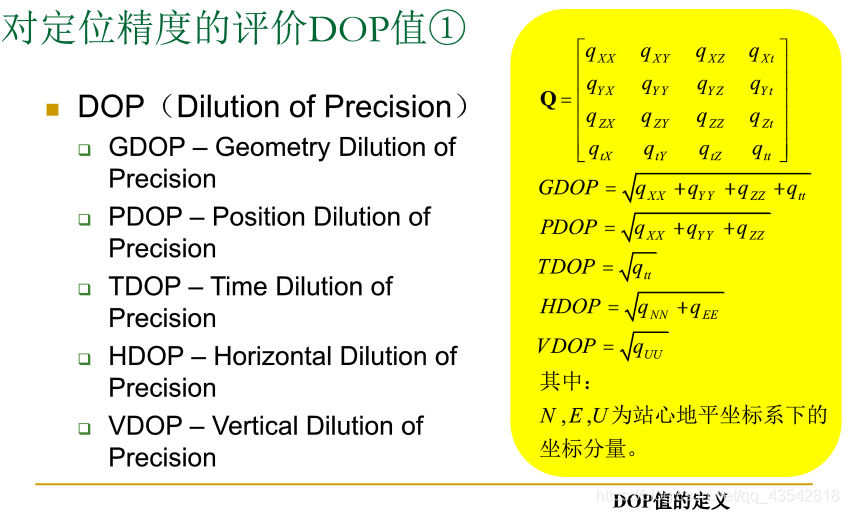
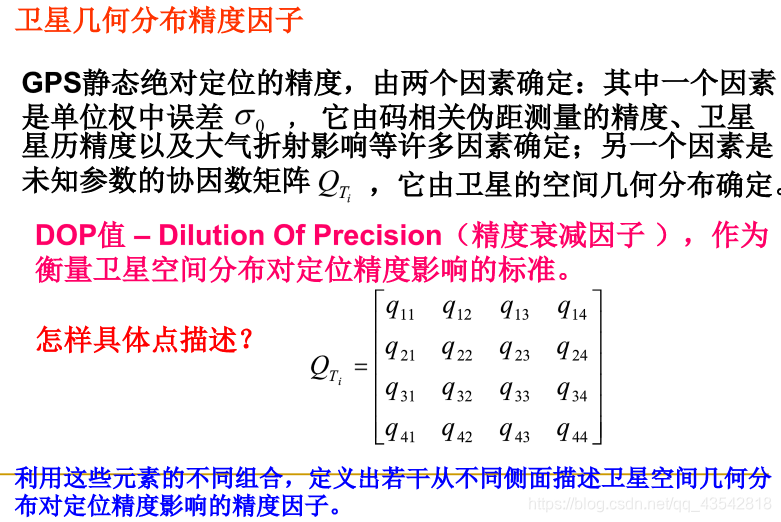
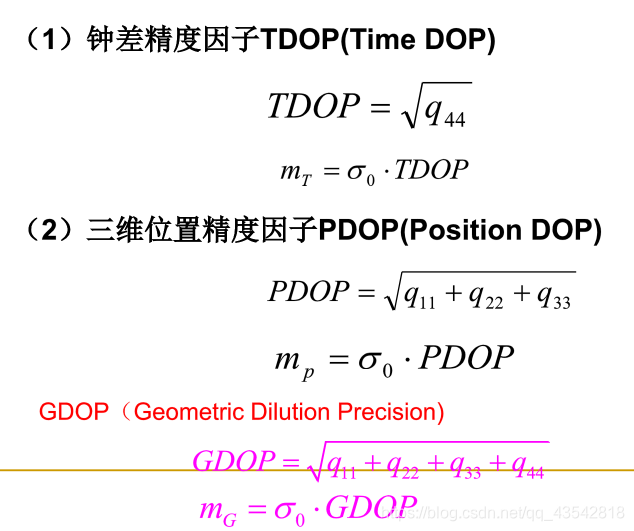
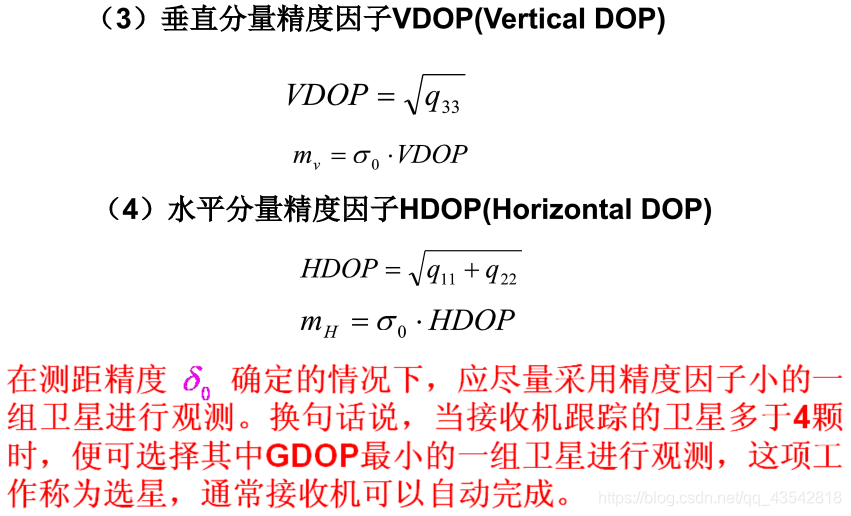
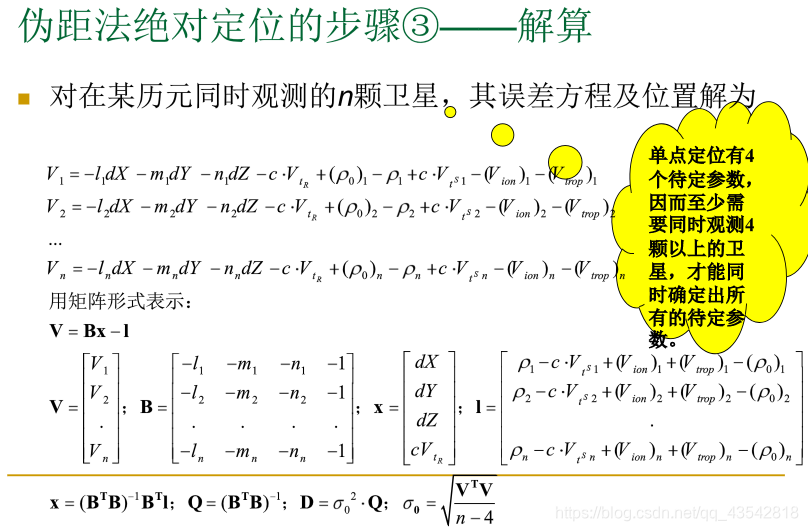
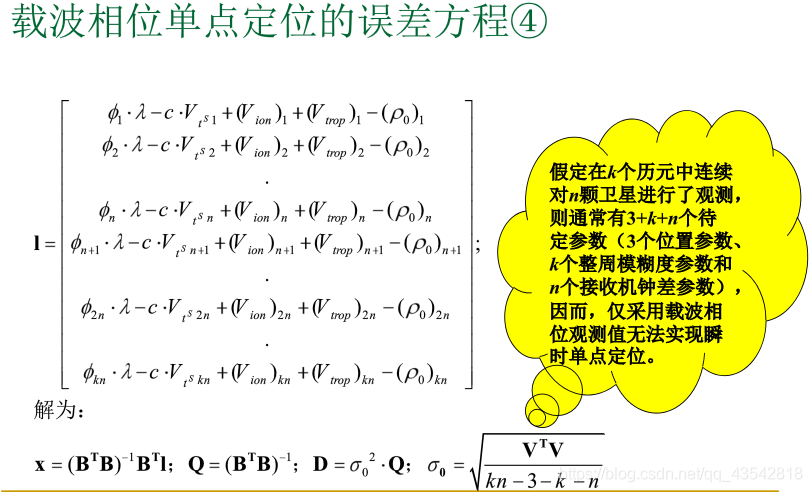
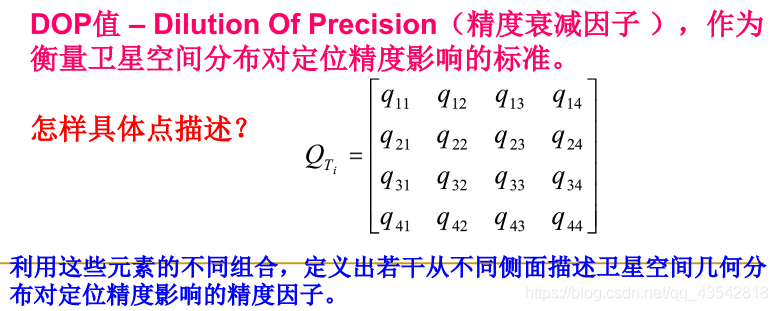
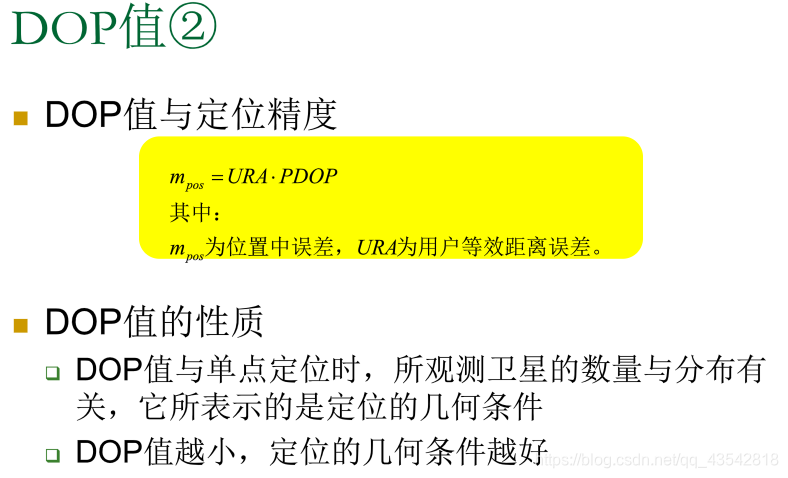
精度高于伪距法静态绝对定位。 定位中应加入电离层、对流层等各项改正,防止和修复周跳,以提高精度。 整周未知数结算后,不在为整数,可将解算出的观测站坐标称为固定解,否则为实数解。 载波相位静态绝对定位结算的结果可以为相对定位的参考站。 GPS静态绝对定位的精度,由两个因素确定:其中一个因素时单位权中误差σ0,它由码相关伪距测量的精度、卫星星历精度以及大气折射影响等许多因素确定;另一个因素是位置参数的协因数阵,它由卫星的空间几何分布确定。
卫星星历:精密星历 卫星钟差:精密钟差、地面跟踪 电离层延迟:双频改正 对流层延迟:模型改正 相对论效应改正 卫星姿态影响:卫星天线相位中心改正、相位缠绕(GPS卫星发射右旋极化的无线电波) 同观测站有关改正:地球固体潮汐、打样负荷潮汐、地球自转参数改正 天顶对流层参数估计 高采样率的卫星钟差 模型、改正和解算策略同IGS的兼容性
精密单点定位 传统GPS单点定位利用伪距观测值以及官博星历所提供的卫星轨道参数和卫星钟改正数进行计算。 载波相位绝对定位较伪距单点定位的精度高,但由于涉及到整周未知数的求解问题,一般很难达到实时性求解,且卫星的星历误差、卫星钟差等主要误差仍然存在,其定位精度依然较低。 精密单点定位是利用全球若干IGS跟踪站数据计算出卫星的精密轨道参数和卫星钟差,再对单台接收机采集的相位和伪距观测值进行非差定位处理。 精密单点定位由如下关键之处: 1.在定位过程中需同时采用相位和伪距观测值; 2.卫星轨道精度需达到cm级水平; 3.卫星钟差改正精度需达到ns量级; 4.需考虑更精确的其他误差改正模型。
定义:确定进行同步冠词的接收机之间相对位置的定位方法,称为相对定位。 差分观测值的定义:将相同频率的GPS载波相位观测值依据某种方式求差所获得的新的组合观测值 定位结果:
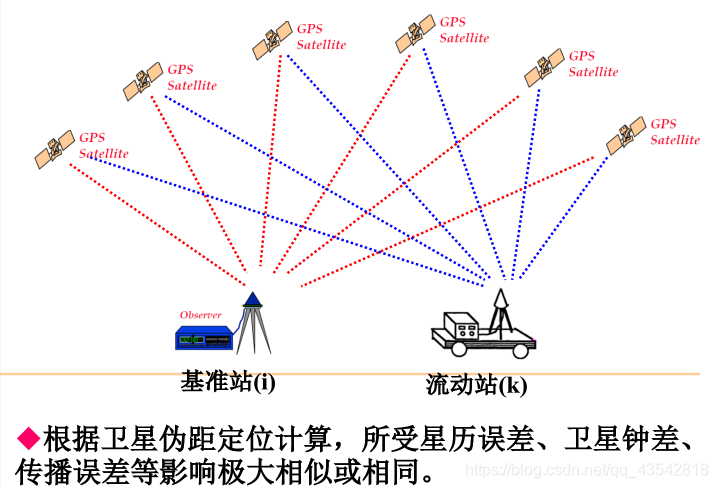
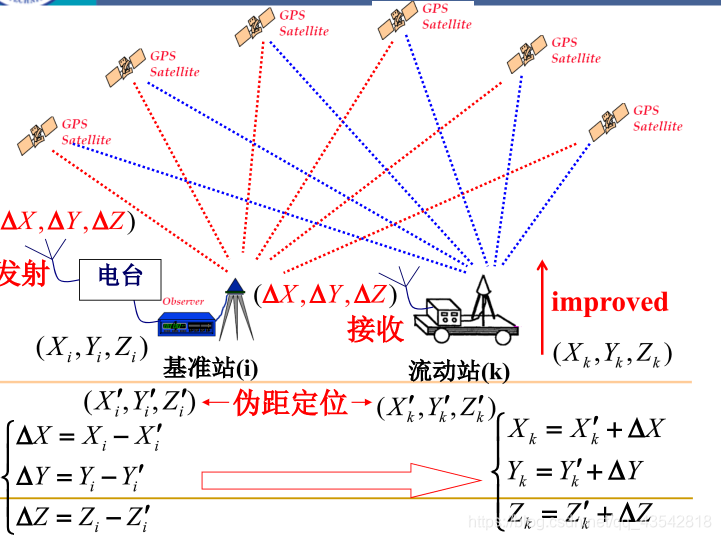
差分GPS基本原理: 对于相距不远的测站观测同一颗卫星,两个站观测值的误差存在着时空相关性。 在一定时间内,同一卫星相邻历元观测量中的误差及影响大体相同 根据基准站的已知坐标和所测卫星的已知瞬间位置,就可以计算出差分改正信息,以该值作为修正值传输给流动站的用户。 流动站根据修正值来改正同步观测的相应观测量,进而计算流动站的瞬间位置,以达到提高精度的目的。 差分GPS的方法 1。位置差分 优点:传输数据少,设备便于安装 缺点:基准站、流动站需同步观测相同的卫星
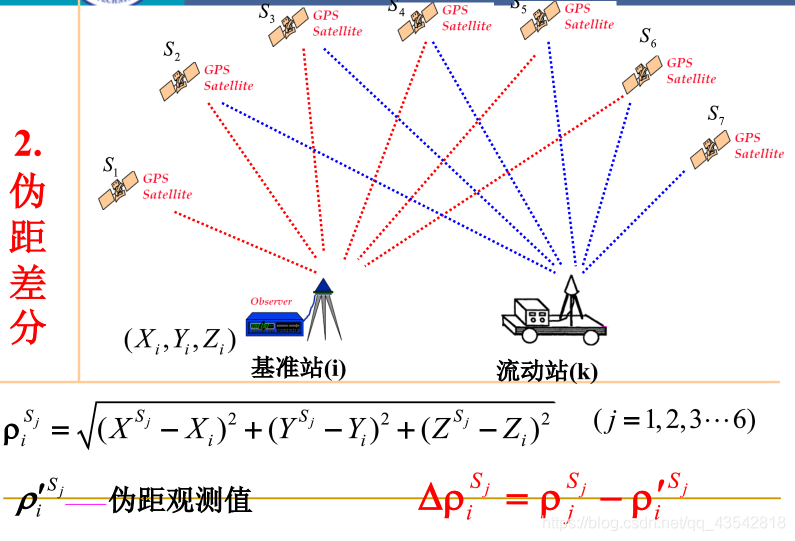
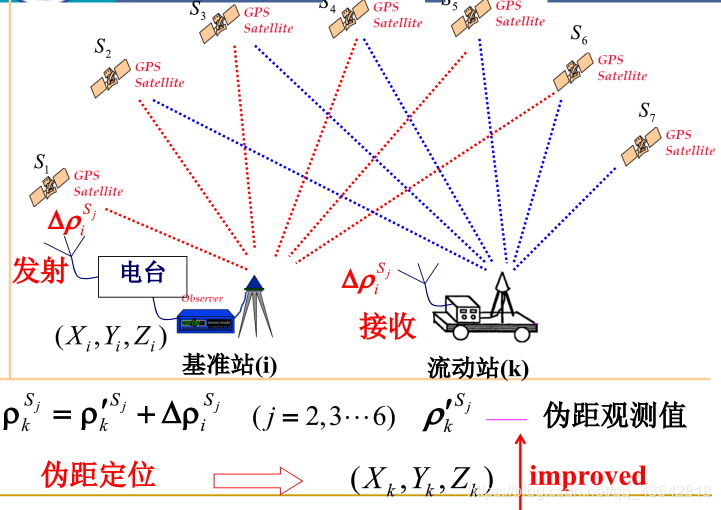
2.伪距差分 优点:基准站、流动站无需必须观测相同的卫星;可选星,改善空间几何分布,提高精度。 局限:误差抵消的程度取决于基准站于流动站的距离;随着基准站与流动站的距离增加,出现系统误差。
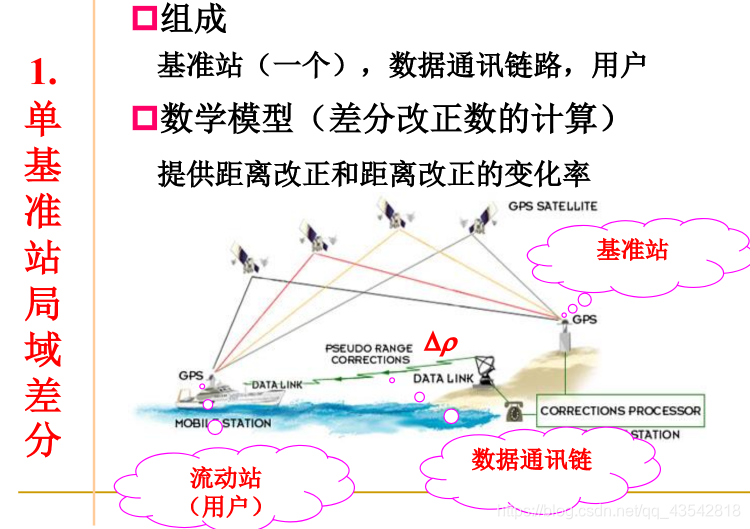
局域差分GNSS 1.但基准站局域差分 优点:结构、模型简单 缺点:差分范围小,精度随基准站距离的增加而下降,可靠性低
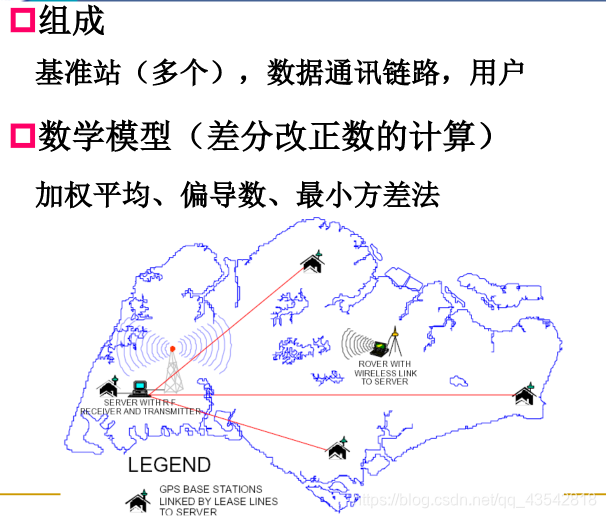
2.多基准站局域差分 优点:差分精度高,可靠性高,差分范围增大 缺点:差分范围仍然有限,模型不完整
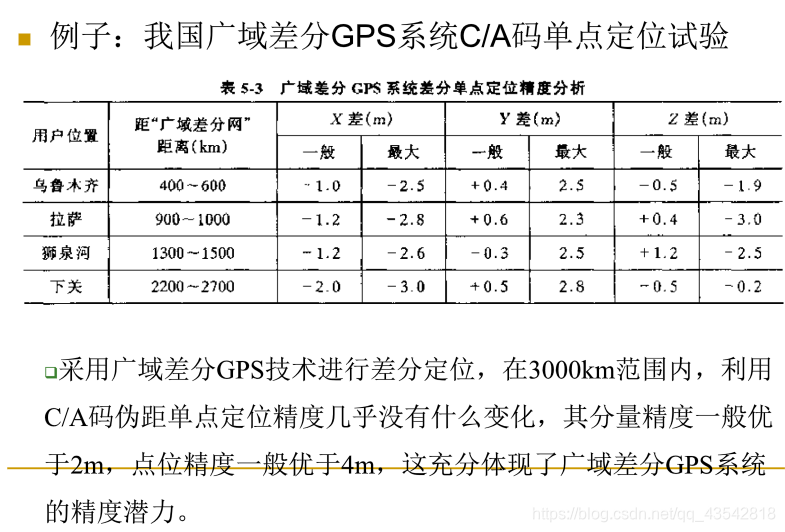
广域差分GPS 1.广域差分GNSS 优点:差分精度高、差分精度与距离无关、差分范围大 缺点:系统结构复杂、建设费用高
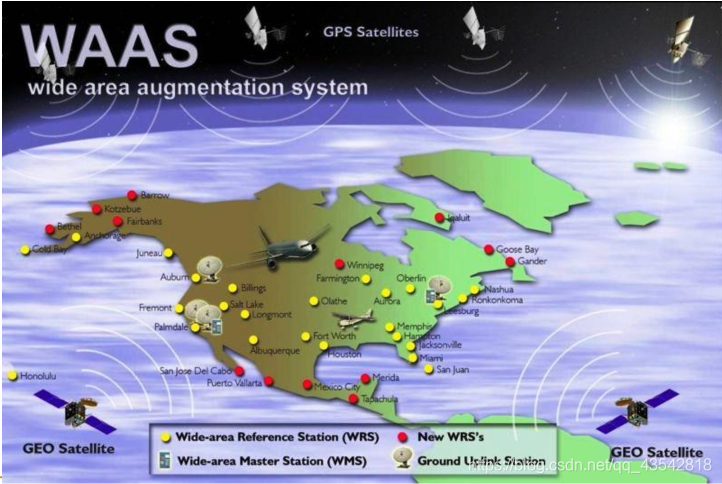
2.广域增强差分GNSS
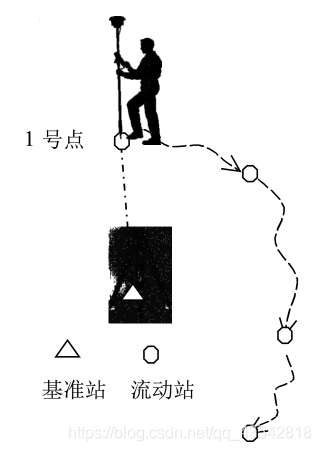
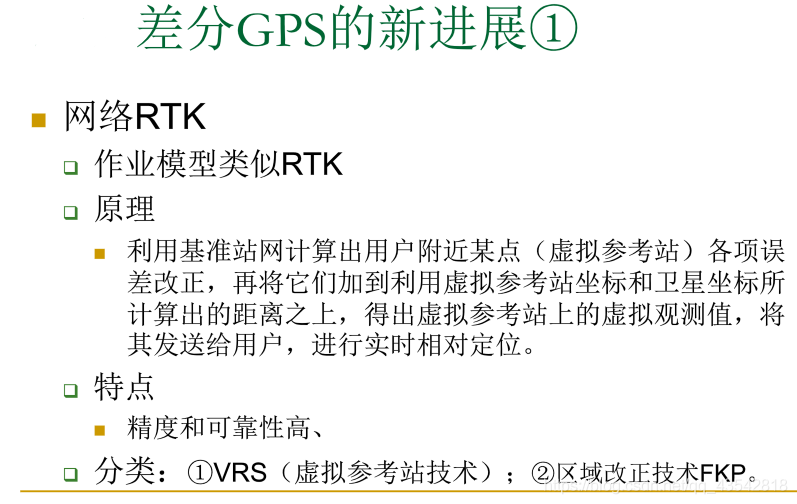
基本思想:在基准站上安置一台GPS接收机,对卫星进行连续观测,并通过无线电传输设备实时地将观测数据及站坐标信息传送给用户站;用户站一方面通过接收机接收GPS卫星信号,同时还通过无线电接收设备接收基准站传送的观测数据,然后根据相对定位原理,实时地进行处理数据,并实时地以厘米级的精度给出用户站的三维坐标。 修正法 基准站将载波相位的修正量发送给用户站,以对用户站的载波相位进行改正实现定位。 求差法 求差法就是将基准站观测的载波相位观测值实时地发送给用户观测站,在用户站对载波相位观测值求差,获得诸如静态相对定位的单差、双差、三差求解模型,并采用与静态相对定位类似的求解方法进行求解。 载波相位差分的关键技术ー一求起始相位模糊度 RTK的应用于海上精密定位,地形测图和地籍测绘 RTK缺点: RTK技术也同样受到基准站至用户距离的限制,为解决此问题,发展成局部区域差分和广域差分技术。通常把一般差分定位系统叫做DGPS,局部区域差分定位系统叫做 ADGPS,广域差分系统叫做 WADGPS. 关键技术是高波特率数据传输的可靠性和抗干扰性