ubuntu18.04下使用4G远程通信
系统先设置为自动登录,无需密码验证
…
树莓派4b实现4G远程通信
1、USB连接4G通信模块
对于树莓派来说可能 ifconfig 命令可能无法查看到 usb0,直接输入命令
终端输入:
sudo dhclient -v usb0
2、终端输入 ping www.baidu.com 查看是否可以联网
3、 实现联网后设置teamviewer
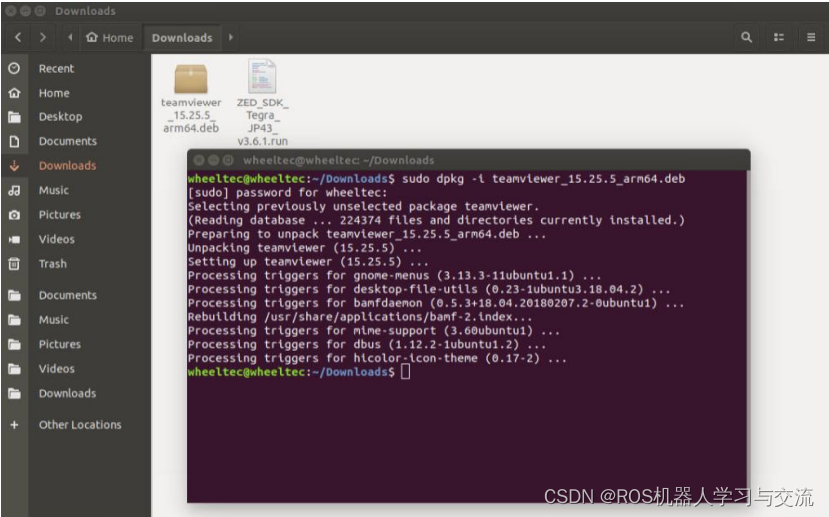
首先先从官网下载 Teamviewer 安装包到本地目录下,然后进入到目录下使用 dpkg 指令安装软件,具体操作如下图
安装成功之后登录要联网注册一个邮箱账号并绑定设备,需要在邮箱验证可信任设备,然后进入 Teamviewer 界面。如果被控端与控制端使用的是同一个邮
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)