树莓派4b之ubuntu18.04开机自启动sh脚本文件
1、创建sh脚本,以自启动4G通信模块为例
#!/bin/bash
##检测IP连通性,若不通则进行拨号
PIP="www.baidu.com"
while true ;
do
echo "正在检测IP是否连通"
/bin/ping $PIP -c 3 >/dev/null 2>&1
if [ "$?" != "0" ]; then
echo "dongguan"|sudo -S dhclient -v usb0 *//此处dongguan改成自己树莓派的用户名密码即可,我们的密码是111*
##echo "已经拨号"
fi
sleep 20
done
注: 上述dongguan改成自己树莓派的用户名密码即可,我们的密码是111
…
…
2、将sh脚本添加到ubuntu开机自启动
方法一 ubuntu下设置软件开机自启动
(1)、进入主菜单界面在搜索框中输入startup applications
(2)、点击打开后会出现“Startup Applicacions Preferences”界面
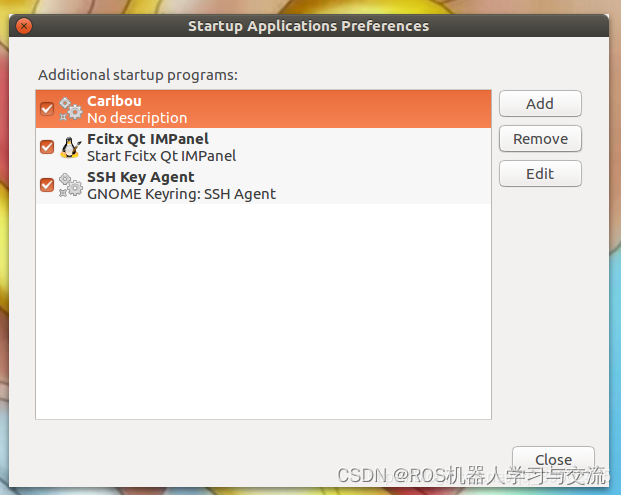
(3)、3.点击add按钮
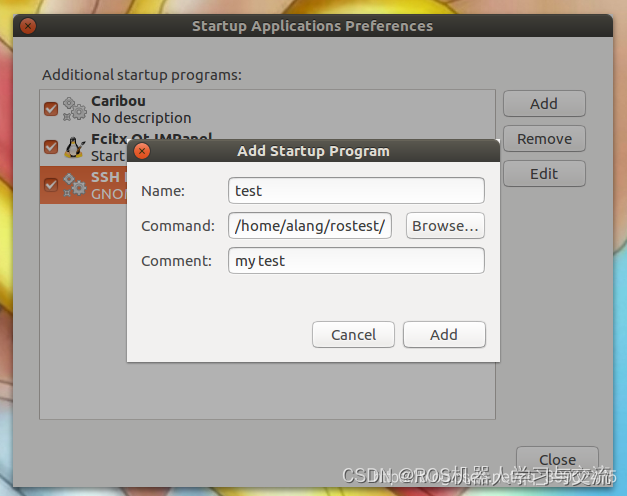
Name:应用名称
Command:运行文件位置
Comment:注释,用来描述文件
在“Add Startup Program”界面中输入相关信息,例如:Name:testCommand:/home/alang/rostest/qt_ros_test/devel/lib/qt_ros_test/qt_ros_test(运行文件所在位置路径)
Comment:my test
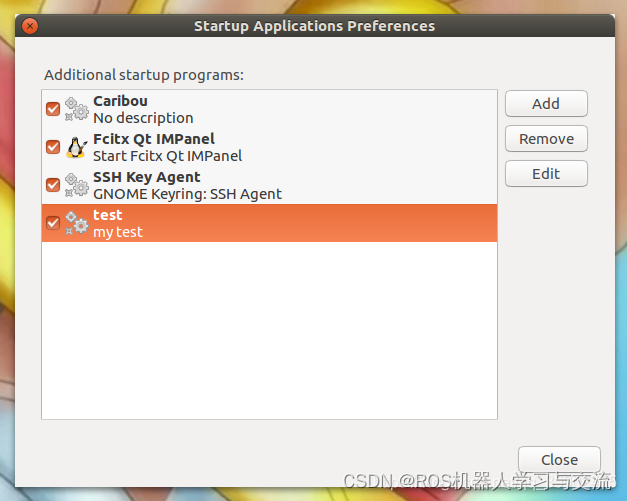
(4)、最后点击Add按钮即添加成功,如下图所示,这样就可以让程序在开机时自启动运行
方法二 ubuntu下设置软件开机自启动
链接: 设置树莓派ubuntu18.04开机自启动完整教程
(1)、将写好的sh脚本放入到/etc/init.d/目录下,有sudo cp 拷贝
(2)、赋予权限 sudo chmod 755 /etc/init.d/xxx.sh文件
(3)、添加到开机启动项
sudo update-rc.d xxx.sh defaults
(4)、reboot重启即可开启开机自启动sh脚本文件
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)