Betaflight BN880 GPS 简单测试
- 1. 源由
- 2. 窗台对比测试
- 3. 开阔区域测试
- 3.1 GPS安装位置
- 3.1.1 BN880 GPS 机尾打印支架 安装位置
- 3.1.2 BN880 GPS 机头固定 安装位置
- 3.1.3 M8N GPS 机尾打印支架 安装位置
- 3.2 M8N模块历史记录
- 3.3 BN880模块第一次(机尾安装)
- 3.3.1 第一电
- 3.3.2 第二电
- 3.3.3 第三电
- 3.3.4 第四电
- 3.4 BN880模块第二次(机尾安装)
-
- 3.5 BN880模块第三次(机头固定)
- 3.5.1 第一电
- 3.5.2 第二电
- 3.5.3 第三电
- 3.5.4 第四电
- 3.6 M8N模块(机尾安装)
-
- 4. 分析
- 4.1 第一次
- 4.2 第二次
- 4.3 第三次
- 4.4 第四次
- 4.5 厂家技术支持测试
- 5. 总结
- 6. 参考资料
- 7. 附录-技术沟通
- 8. 附录-ublox射频抗干扰设计
- 9. 附录-ublox模块优化
- 10. 附录-串口板供电
- 11. 附录-备注
1. 源由
在ArduPilot飞控之DIY-F450计划下,原地arm/disarm验证发现GPS搜星,锁定位置速度超级慢(>45分钟,甚至无法锁定)。
2. 窗台对比测试
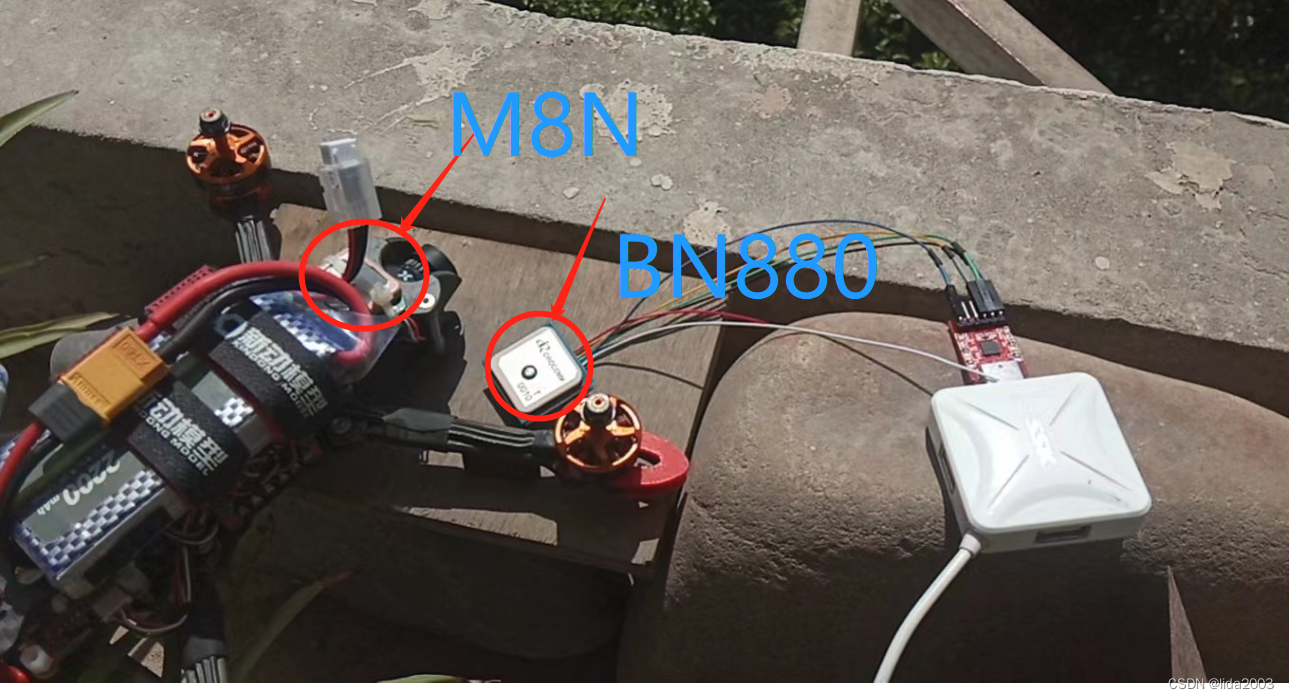
- 同一时刻
- 同一位置
- 30分钟测试
- M8N 6分钟,锁定5颗星(BF OSD显示),持续锁定;
- BN880 8分钟3D锁定,但是9分钟又掉了定位,后续一直没有定位(u-center显示);
3. 开阔区域测试
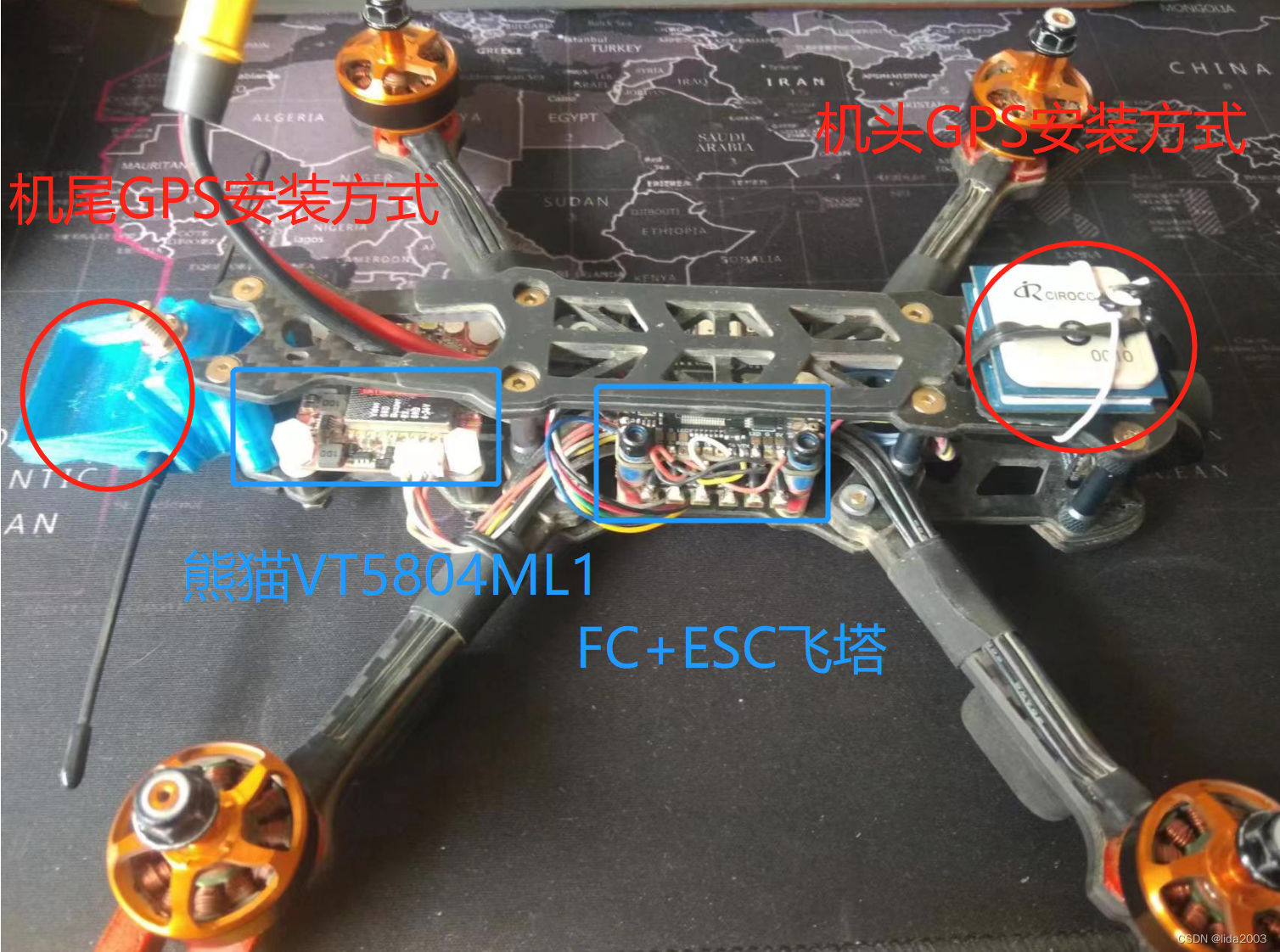
3.1 GPS安装位置
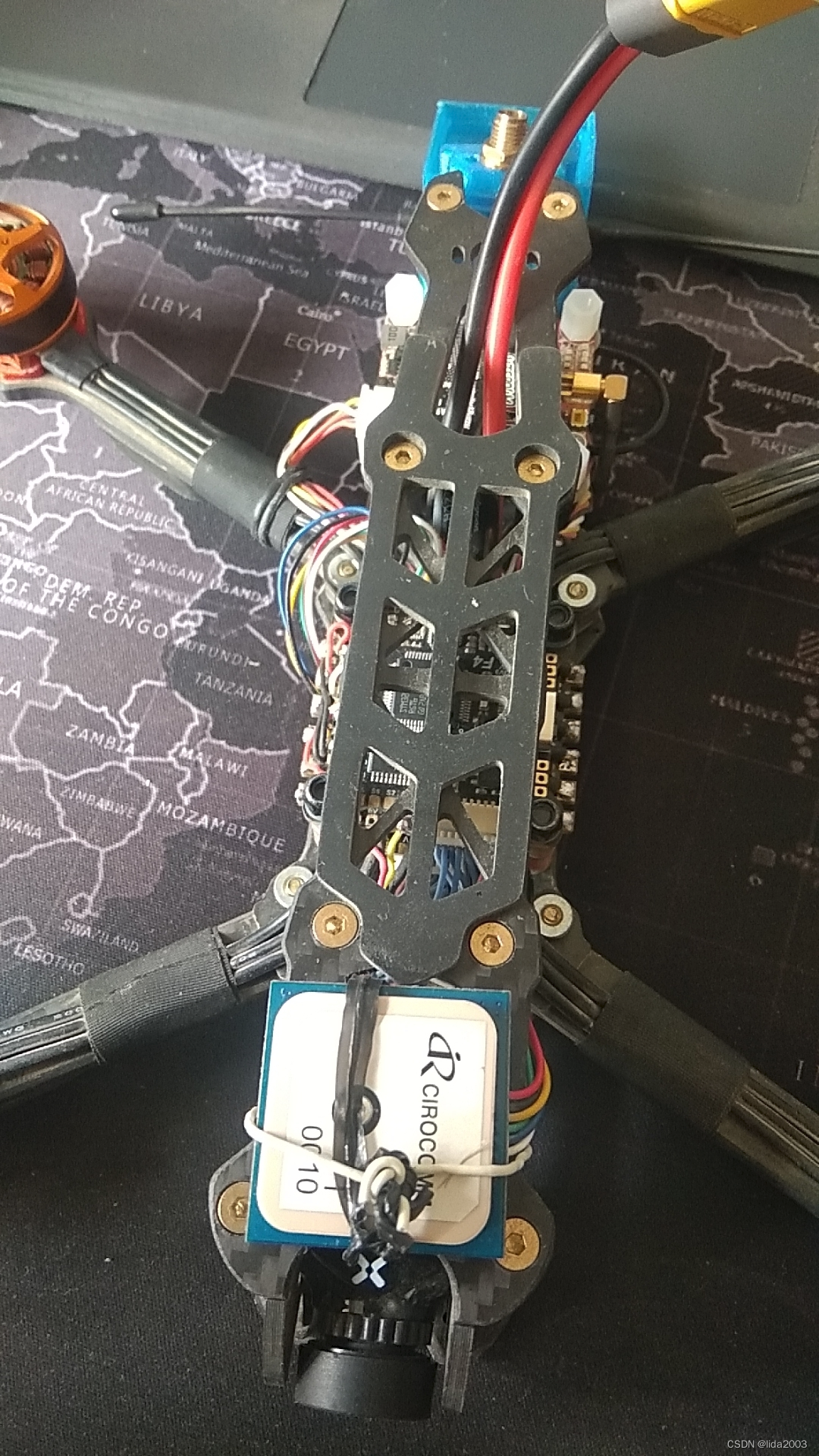
3.1.1 BN880 GPS 机尾打印支架 安装位置
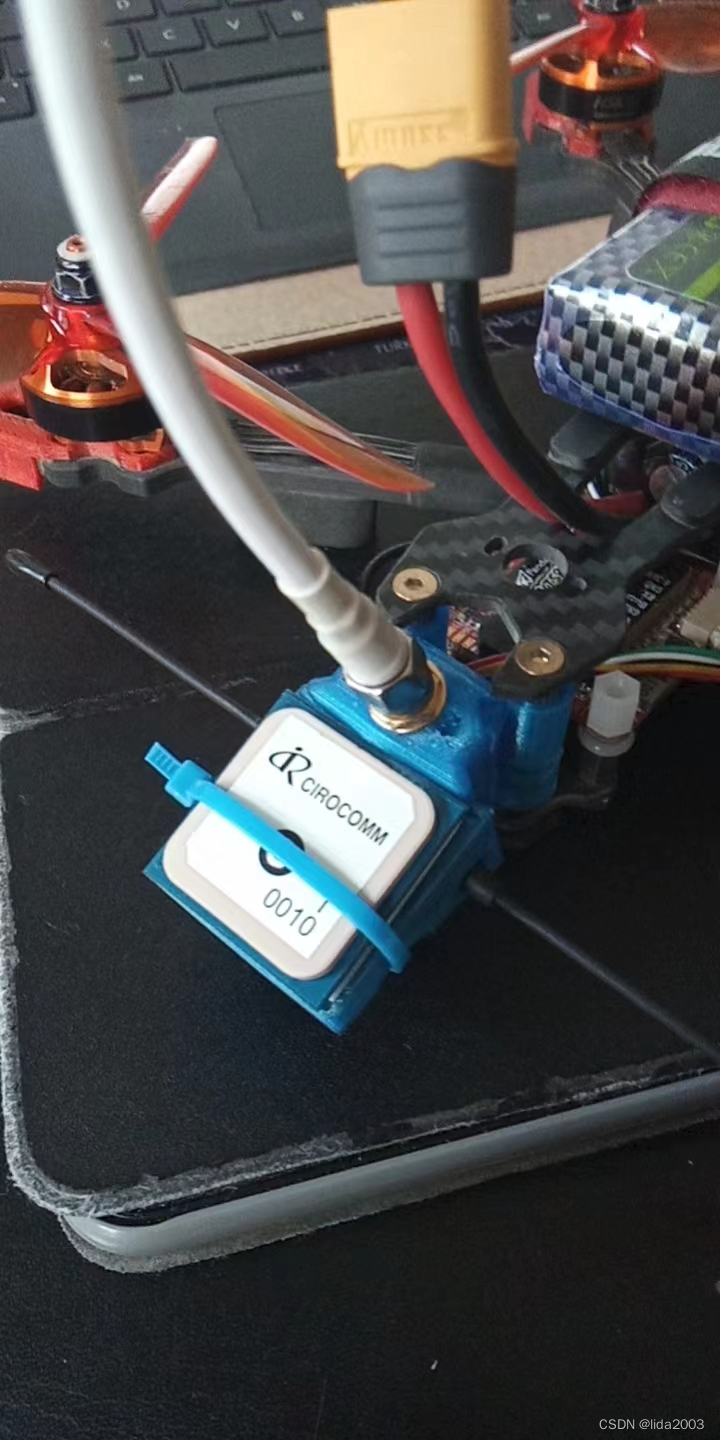
3.1.2 BN880 GPS 机头固定 安装位置
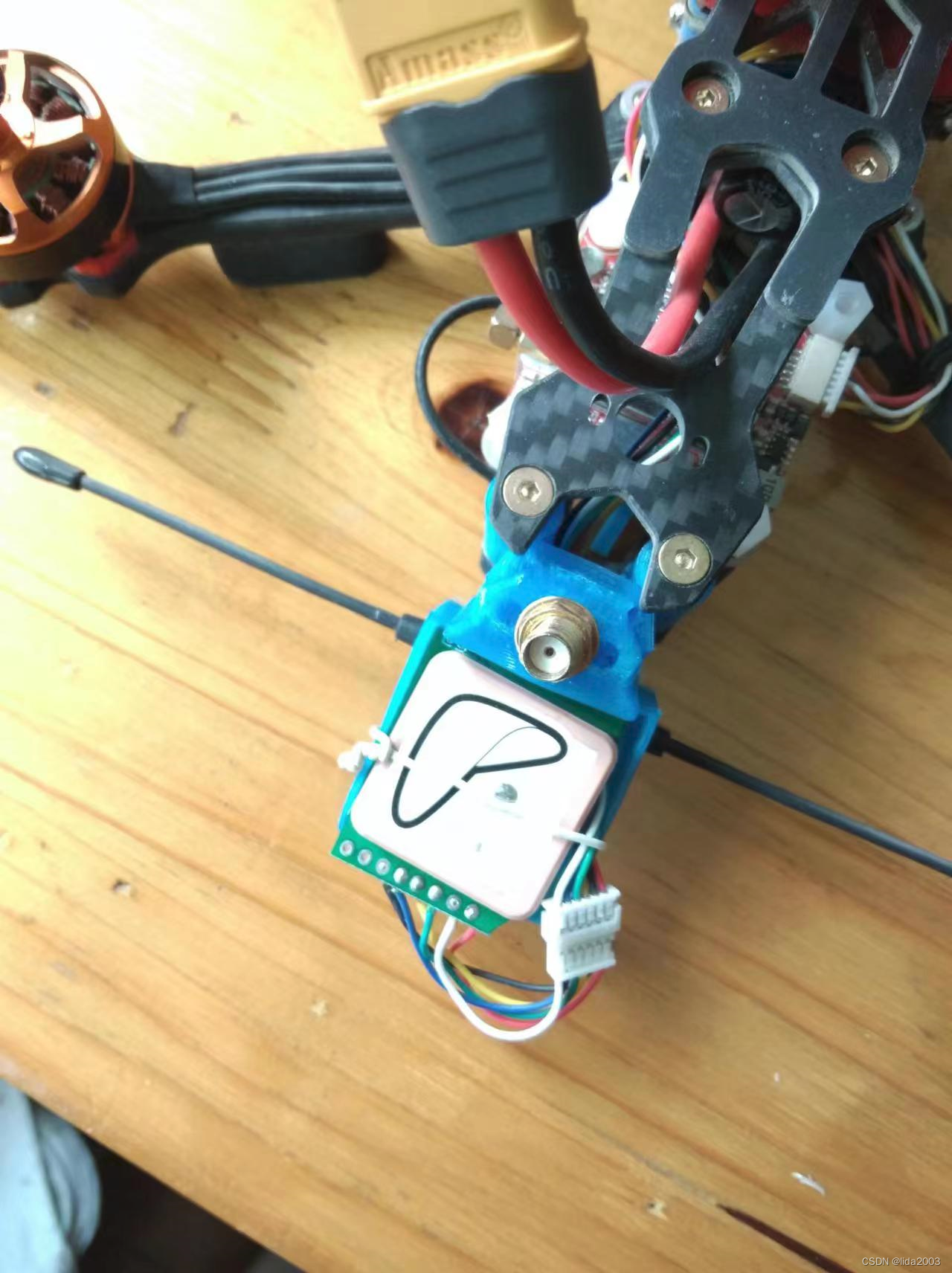
3.1.3 M8N GPS 机尾打印支架 安装位置
3.2 M8N模块历史记录
通常情况下,第一电(冷启动),大约2~3分钟就能锁定。天气不好的时候6 - 7颗星,天气好的时候8 ~ 9 颗以上。
注:M8N之前一直是机头固定方式
BetaFlight Mark4 + 城北公园230228
3.3 BN880模块第一次(机尾安装)
3.3.1 第一电
- 飞完(历时10分钟),无法锁定位置,Betaflight显示0卫星锁定。
Betaflight BN880 GPS 机尾打印支架 第一电(冷启动)
3.3.2 第二电
- 飞行2分钟,搜星4颗可用,尚无法用于Betaflight GPS位置。
- 4分45秒,搜星6颗,可用于定位(从冷启动开始算,总耗时15分钟)。
Betaflight BN880 GPS 机尾打印支架 第二电
3.3.3 第三电
Betaflight BN880 GPS 机尾打印支架 第三电
3.3.4 第四电
- 最多的时候8颗星,树林稍有遮挡掉到7颗或者6颗左右。
Betaflight BN880 GPS 机尾打印支架 第四电
3.4 BN880模块第二次(机尾安装)
3.4.1 第一电
- 飞完(历时13分钟),无法锁定位置,Betaflight显示0卫星锁定。
Betaflight BN880 GPS 机尾打印支架 第二次 第一电
3.4.2 第二电
- 飞行3分36秒,搜星4颗可用,尚无法用于Betaflight GPS位置。
- 10分20秒,搜星5颗,尚无法用于Betaflight GPS位置。
Betaflight BN880 GPS 机尾打印支架 第二次 第二电
3.5 BN880模块第三次(机头固定)
3.5.1 第一电
- 冷启动
- 37秒左右,5颗星;
- 1分28秒,7颗星;
- 1分48秒,9颗星;
- 2分钟;10颗星;
- 2分48秒,11颗星;
- 2分56秒,12颗星;
- 3分,13颗星;
- 3分19秒,14颗星;
- 6分33秒,15颗星;
Betaflight BN880 GPS 机头扎带固定 第一次 第一电
3.5.2 第二电
- 热启动,上电9颗星;
- 10秒,12颗星;
- 43秒,13颗星;
- 47秒,15颗星;
- 1分,16颗星;
- 1分29秒,最多达到19颗星;
Betaflight BN880 GPS 机头扎带固定 第一次 第二电
3.5.3 第三电
- 热启动,上电9颗星;
- 10秒,10颗星;
- 20秒,12颗星;
- 25秒,14颗星;
- 30秒,16颗星;
- 最多17颗星,树林穿越减到13颗左右;
Betaflight BN880 GPS 机头扎带固定 第一次 第三电
3.5.4 第四电
- 热启动,上电没看到星;
- arm后,发现没有卫星(rescure off)
- arm后22秒,12颗星
- arm后30秒,稳定在13~15颗星
- 开阔空中,17颗星稳定,一度达到18颗
Betaflight BN880 GPS 机头扎带固定 第一次 第四电
3.6 M8N模块(机尾安装)
3.6.1 第一电
Betaflight M8N GPS 机尾打印支架 第一电(冷启动)
3.6.2 第二电
Betaflight M8N GPS 机尾打印支架 第二电
4. 分析
4.1 第一次
基于3.2/3.3/3.4测试结果,以及常规配套GPS安装打印件(一般总是合理的安装方式),认为:
- BN880模块冷启动到定位耗时长;
- 总可用星数量不理想,常规模块通常在12~18颗左右);
- 测试的BN880不如M8N的定位能力强;
注1:上述BN880配置,已经厂家技术支持确认过配置参数。
注2:上述情况将反馈厂家技术支持,会再次确认是否质量问题。
4.2 第二次
基于第三次技术沟通,结合笔者Mark4飞机的整体安装方式:FC + ESC飞塔 + 图传(熊猫VT5804ML1)的方式,怀疑图传可能对GPS造成一定的影响。
因此,继续3.5/3.6章节实验,进一步验证怀疑。最终测试结果表明该图传对机尾GPS安装影响显著。
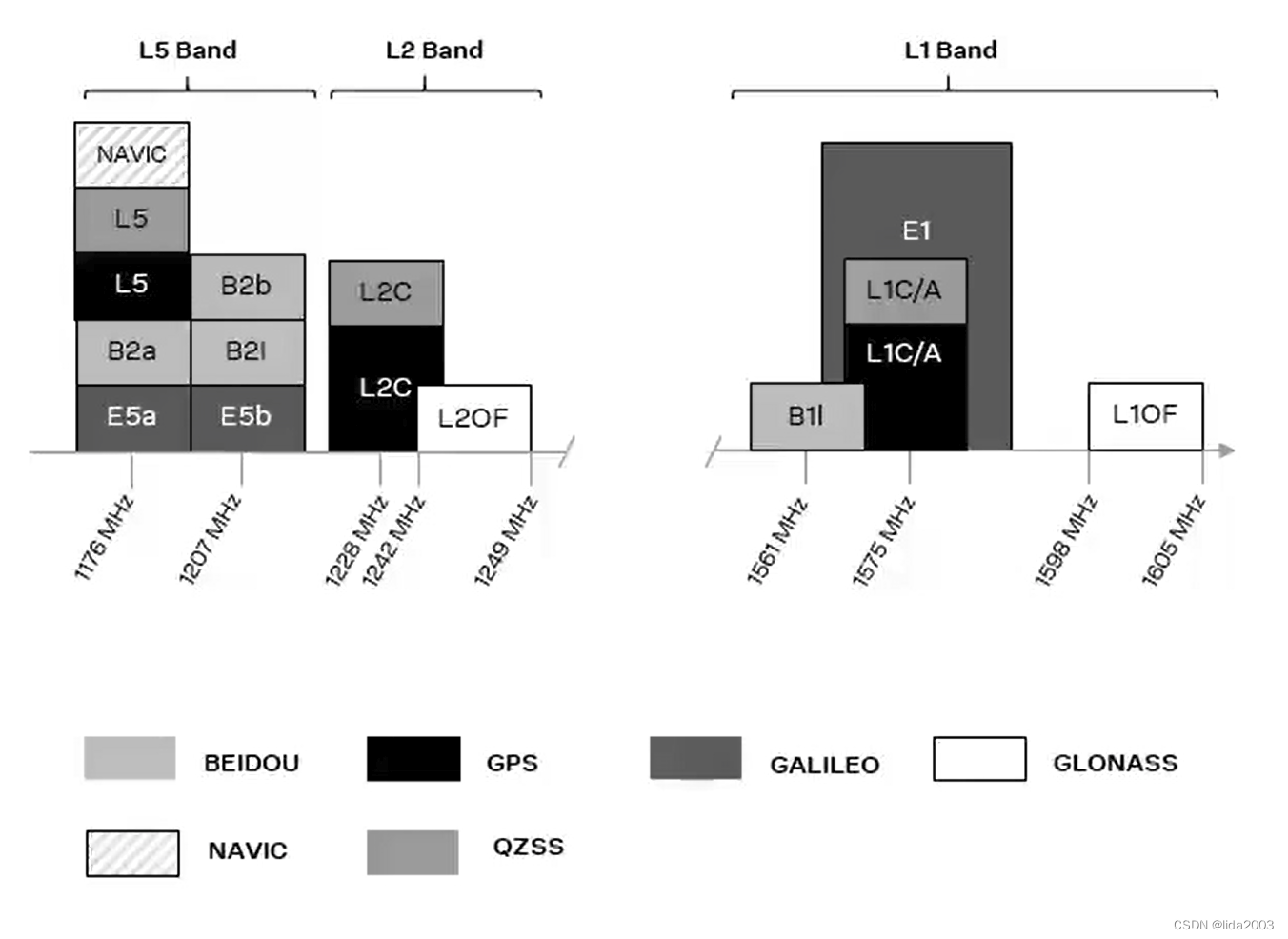
4.3 第三次
卫星系统频点分步情况
目前比较先进的M9/M10 ublox GPS方案设计
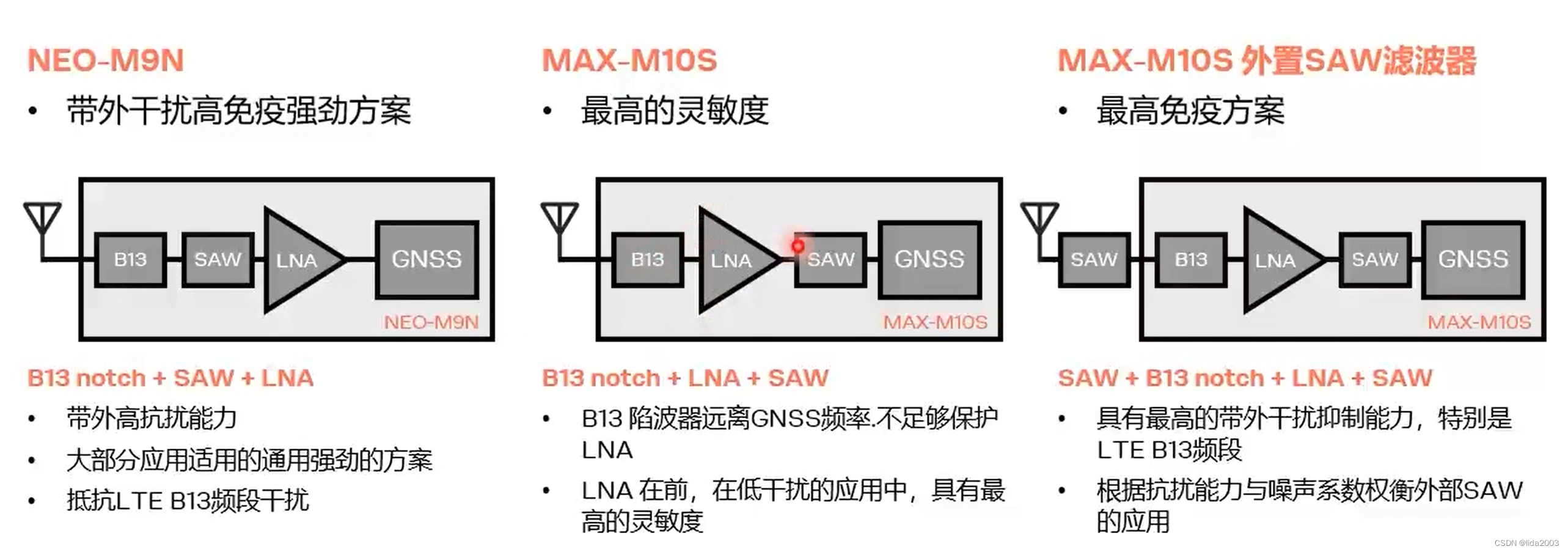
鉴于手头图传,飞控等可用于测试的板子也没有,这里就不在进一步展开跟踪测试。但是从GPS设计的角度看,放在当前这架四轴后端,受到较大的干扰,但是在机头缺没有这个干扰。
因此,主要判断并非来自公共地耦合过来的信号,更为可能得是通过天线耦合进来,也许使用目前抗干扰能力更前的芯片设计能够解决问题。
注:如果后续有条件,可以采用网络分析仪进行进一步的测试,了解实际GNSS天线端的频谱情况。
4.4 第四次
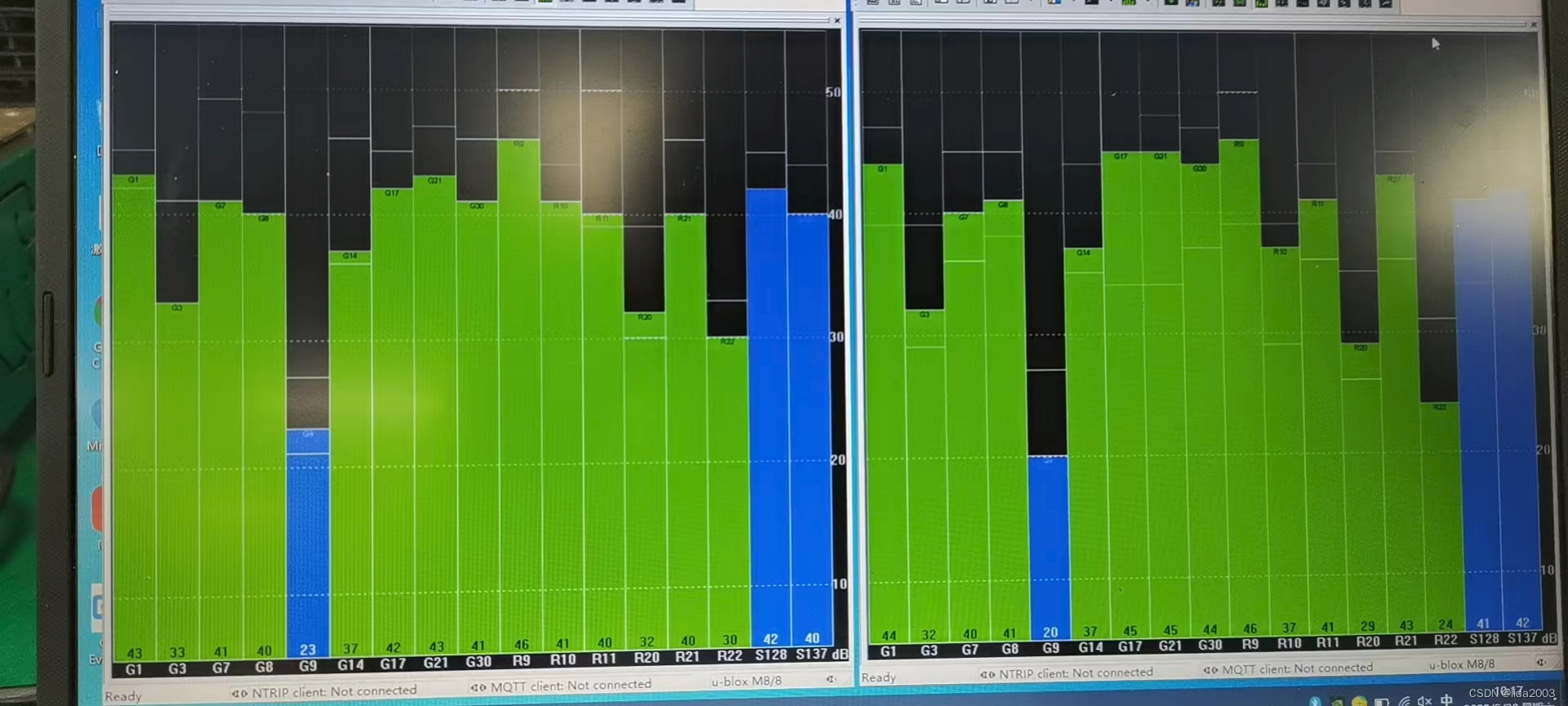
持续分析中:除当前信号强度稍差一些;5Hz波特率建议采用115200bps。
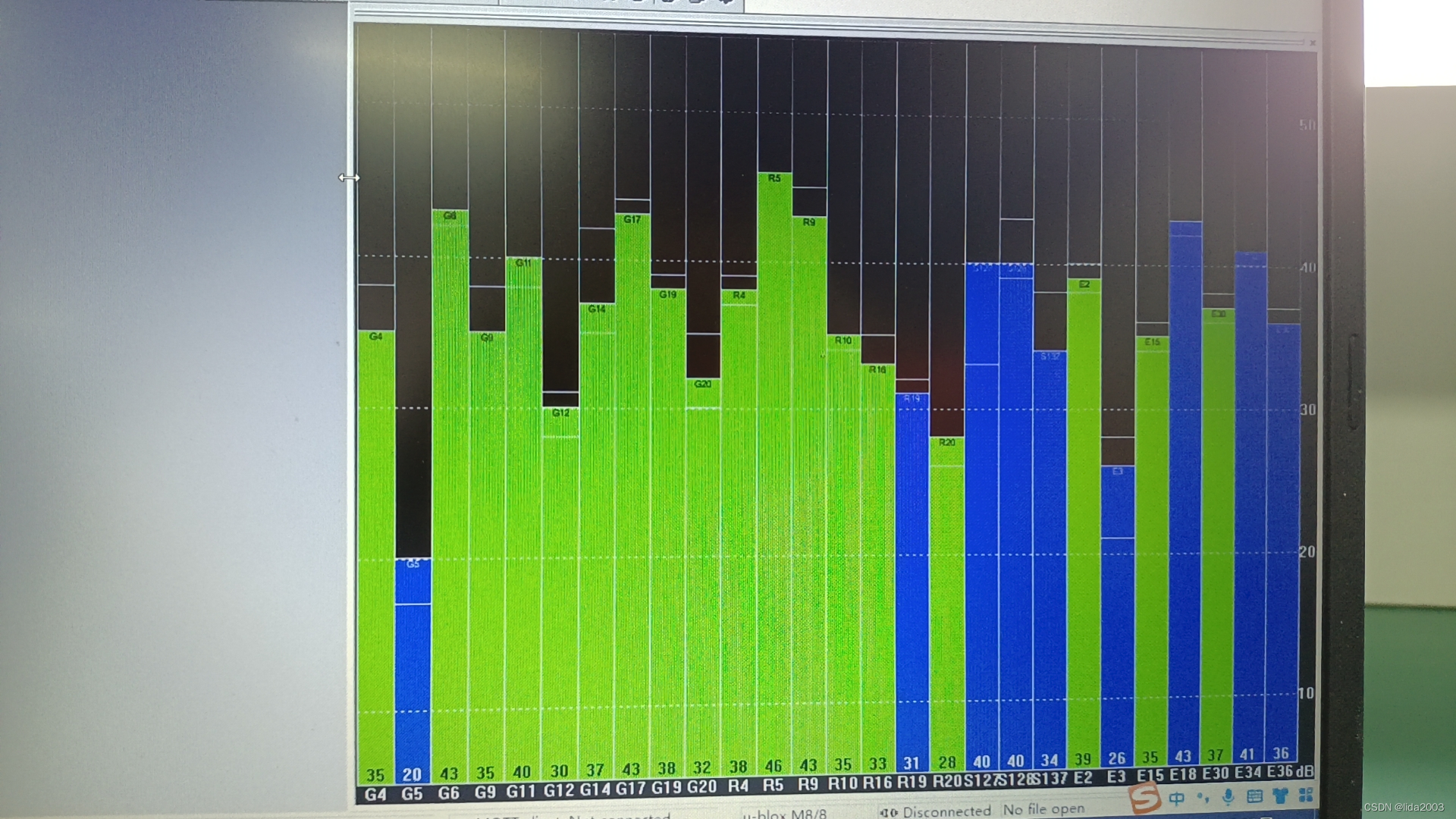
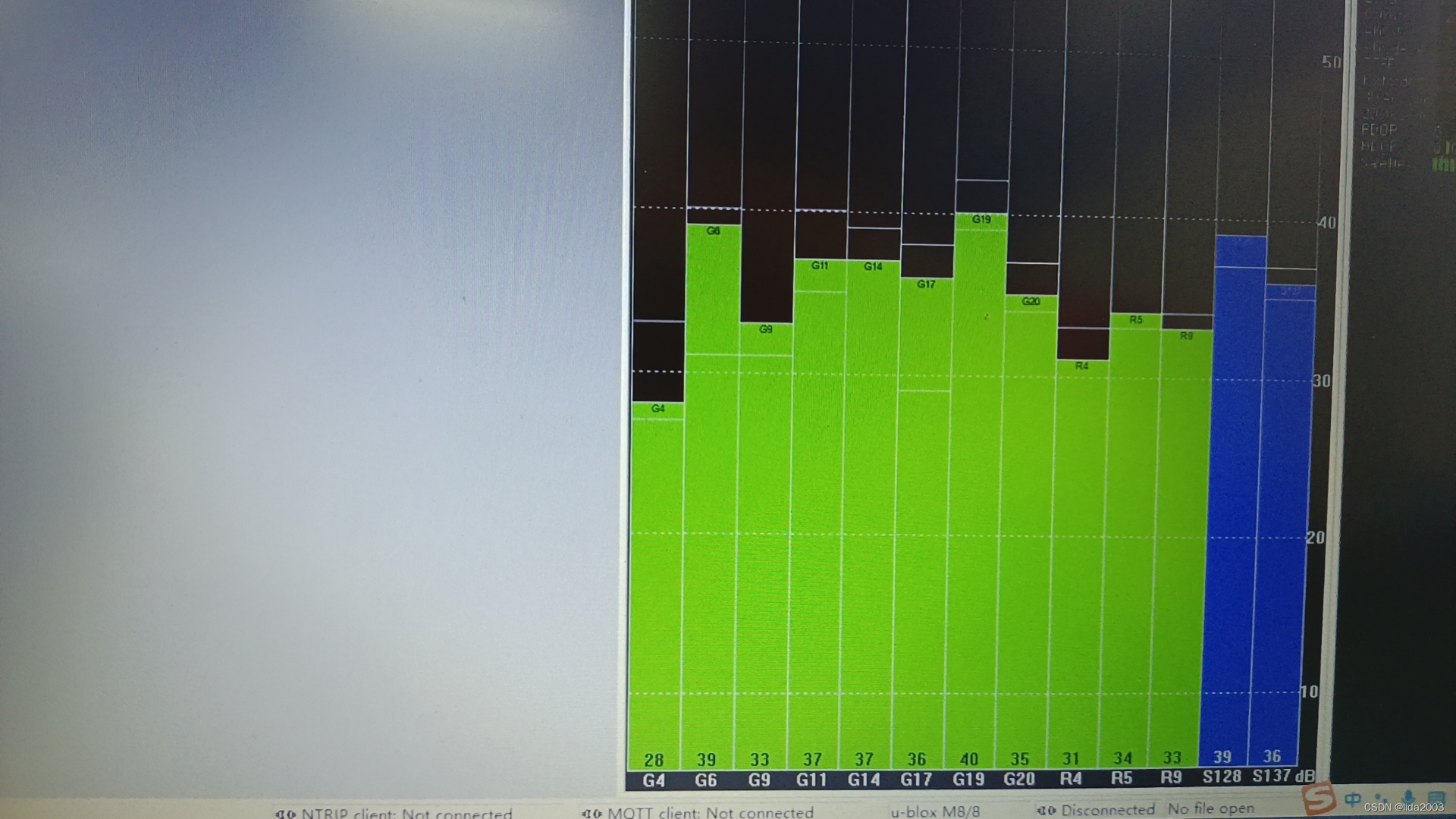
- BN880 信号强度

- 对比参考
4.5 厂家技术支持测试
CP2102串口板测试BN880

PL2303串口板测试BN880
PL2303串口板测试M8N
5. 总结
整个验证过程经历了前前后后一周多时间。最终来看,BN880(模块序列号:2022111407589)没有任何问题。
主要问题如下:
- 串口板问题(具体原因不详:厂家使用PL2303)
- 机头、机尾干扰(机尾干扰比机头严重)
如需更加了解GPS模块性能,可能后续可以跟进以下实验:
- 更换其他串口板,验证串口板问题
- 测试不同位置电磁干扰对GPS模块信号影响
- 基于【9. 附录-ublox模块优化】进行参数调优
6. 参考资料
【1】ArduPilot飞控之DIY-F450计划
【2】BN880 GPS u-center_v22.07工具配置方法
7. 附录-技术沟通
- 第一次技术沟通:窗台虽然开阔,但GPS信号定位未必就一定理想,建议空旷区域测试。
- 第二次技术沟通:BN880不应该明显比M8N差,两者同属8代芯片,应该性能接近。
- 第三次技术沟通:可能存在干扰,建议单独GPS模块测试亦可以返厂检测。
- 第四次技术沟通:测试现象表明信号强度超过40的百分比并不太合理
8. 附录-ublox射频抗干扰设计
如何降低射频干扰对GNSS定位模块的影响(一)降低射频干扰对卫星定位接收机影响的策略
如何降低射频干扰对GNSS定位模块的影响(二)预防干扰与射频前端选择
如何降低射频干扰对GNSS定位模块的影响 (三)ublox产品应用实例
9. 附录-ublox模块优化
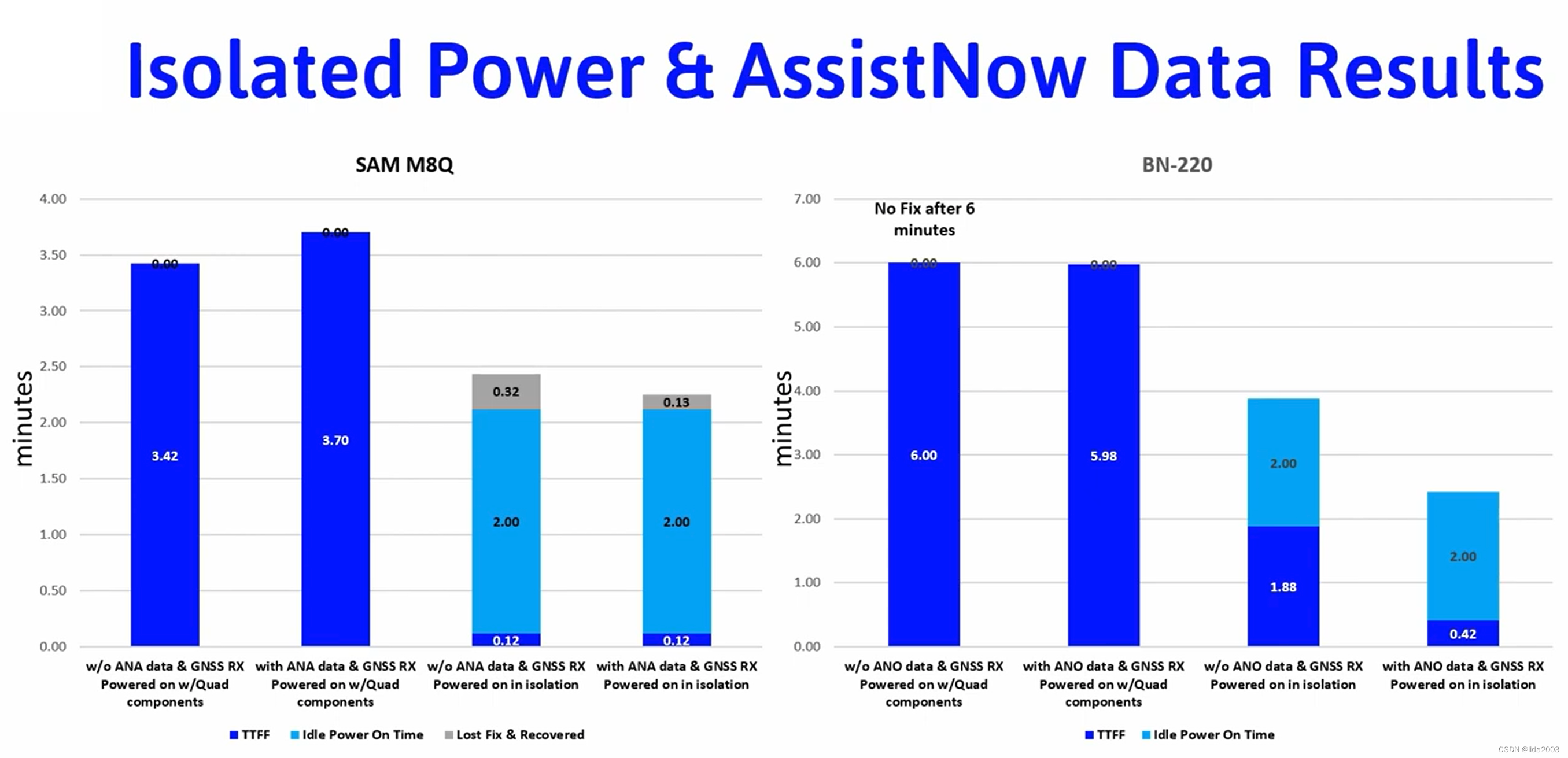
GPS Module Satellite Fix (FAST!)
10. 附录-串口板供电
之前测试比对下来:CP2102串口板感觉不如PL2303串口板容易定位
后仔细查看了CP2102串口板,发现用了3V3供电,经调整为5V供电,信号明显有好转现象。因此,怀疑供电不足(尤其是GPS模块在搜星过程,峰值功率变化还是很大的)。
注:经确认,PL2303串口板使用的是5V供电。
11. 附录-备注
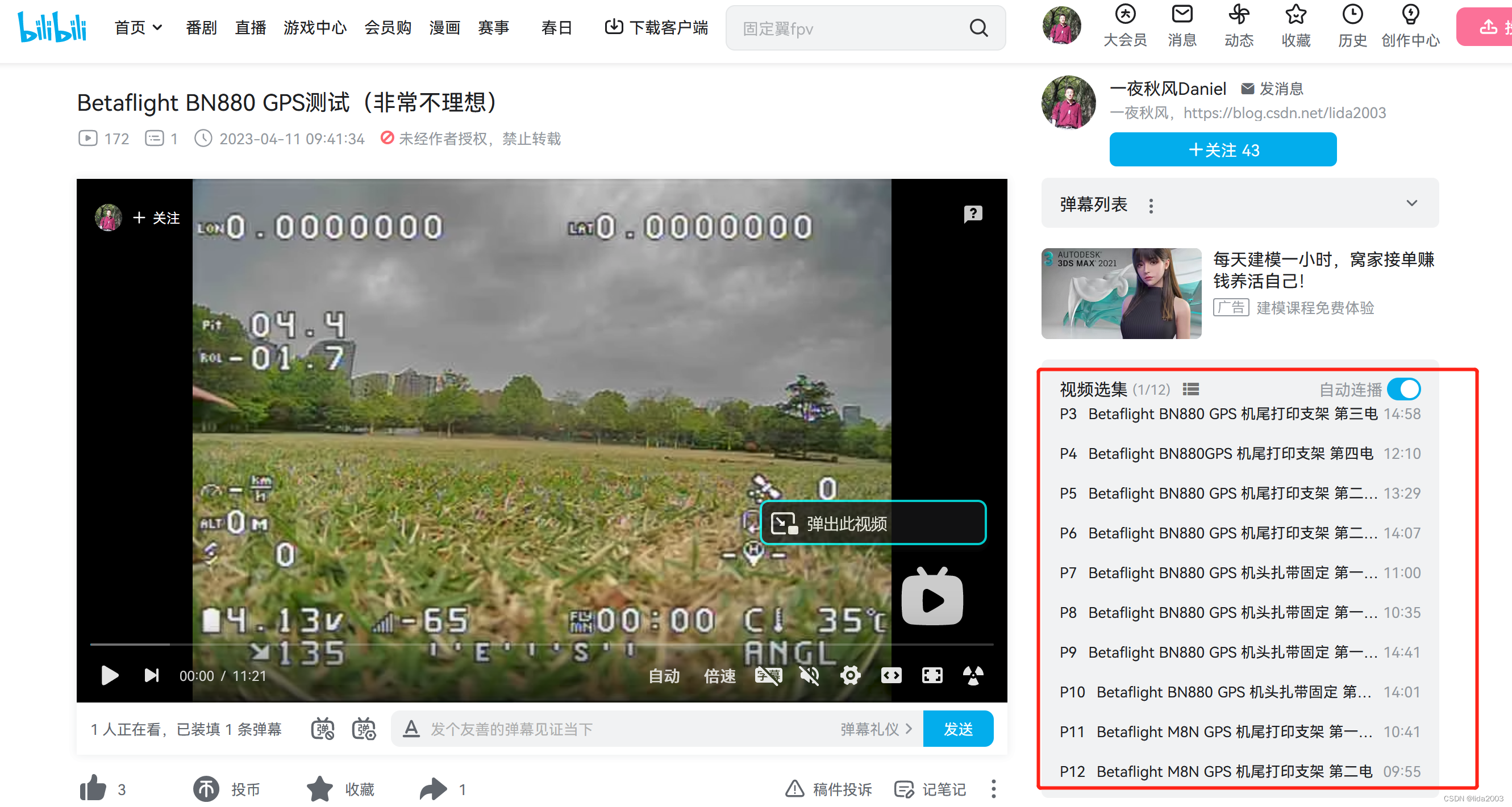
关于bilibili上的测试视频,实际上一共有12个,上面贴的时候是一一对应,但是CSDN确认目前CSDN网页上播放的都是默认第一个。
经CSDN确认:这是一个BUG,已经排程,截止2023年4月21日沟通时,尚未解决。
因此,对于看视频的同学来说,可能会有些困扰。
请直接访问bilibili链接:https://www.bilibili.com/video/BV1ws4y1K7NV/ ,并根据视频标题进行检查,谢谢!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)