(
c
,
x
,
y
,
z
,
w
,
l
,
h
,
θ
)
(c,x,y,z,w,l,h,\theta)
( c , x , y , z , w , l , h , θ )
θ
\theta
θ
o
−
u
,
v
o-u,v
o − u , v
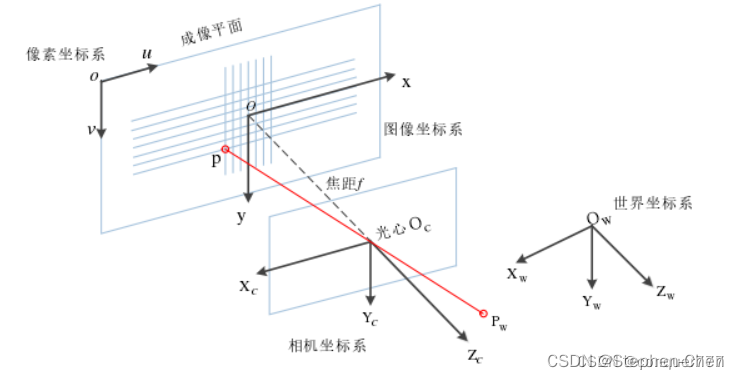
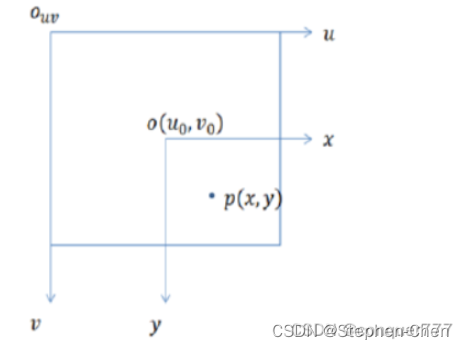
描述物体在数字图像中的位置,单位为像素(pixel),该坐标系以图像顶点作为坐标原点,u、v 轴分别平行于图像坐标系的 x、y 轴。
O
−
x
,
y
O-x,y
O − x , y
反映了成像过程中二维-三维的投影关系,通过连续的实际物理量描述物体在图像平面中的位置,单位为毫米,以垂直于图像平面的相机光轴和图像平面的交点作为坐标原点,由于相机光心往往存在偏移,因此该原点通常并不是图像中心
O
c
−
X
c
,
Y
c
,
Z
c
O_c-X_c,Y_c,Z_c
O c − X c , Y c , Z c
描述空间中目标物体相对于相机的位置而引入的坐标系,单位为米(m),坐标系原点在相机光心,规定垂直于图像平面的相机光轴为Zc轴正方向,垂直向下为Yc正方向 ,按右手坐标系来建立坐标系.
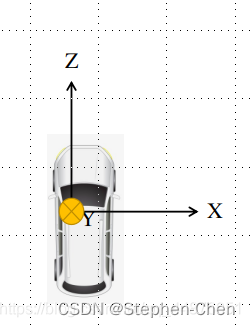
kitti数据集中相机坐标系如图所示:
O
w
−
X
w
,
Y
w
,
Z
w
O_w-X_w,Y_w,Z_w
O w − X w , Y w , Z w
描述物体在客观世界中的绝对位置,单位为米(m),坐标系原点可以由人自由选取以方便计算,很多论文都将世界坐标系的原点选择为自车坐标系的原点
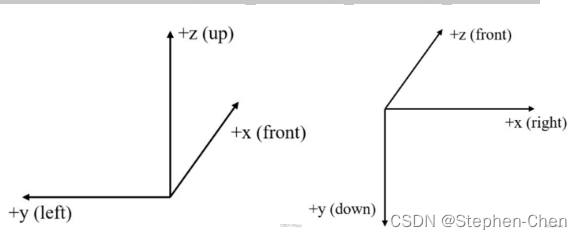
激光雷达坐标系通常定义如下**左图**所示,其中x指向前方,y指向左方,z指向上方。
相机坐标系右图,和激光雷达不一样
世界坐标系和相机坐标系之间的转换其实是旋转和平移的过程,即先旋转到目标坐标系的方向,然后再平移过去。
设目标坐标系下某一点为
[
x
,
y
,
z
]
[x,y,z]
[ x , y , z ]
[
x
’
,
y
’
,
z
’
]
[x’,y’,z’]
[ x ’ , y ’ , z ’ ]
[
x
y
z
]
\begin{bmatrix}x \\y\\z\end{bmatrix}
x y z
R
[
x
⋅
y
⋅
z
⋅
]
+
T
R\begin{bmatrix}x^ ·\\y^·\\z^·\end{bmatrix}+T
R
x ⋅ y ⋅ z ⋅
+ T
其中R为旋转矩阵,T为平移矩阵。在3D目标检测中,一般会写成齐次方程的形式,即
[
x
y
z
1
]
\begin{bmatrix}x \\y\\z\\1\end{bmatrix}
x y z 1
[
R
3
∗
3
)
y
⋅
z
⋅
]
[
x
⋅
y
⋅
z
⋅
]
+
T
\begin{bmatrix}R_3*3)\\y^·\\z^·\end{bmatrix}\begin{bmatrix}x^ ·\\y^·\\z^·\end{bmatrix}+T
R 3 ∗ 3 ) y ⋅ z ⋅
x ⋅ y ⋅ z ⋅
+ T
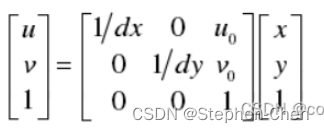
在图像坐标系中坐标(x, y)表示其在图像平面的实际二维物理位置,单位为毫米,而像素坐标系中坐标(u,v) 表示其相对于像素坐标原点平移的像素个数,因此在转换过程中涉及尺度变换和原点平移两个步骤 ,可得到图像坐标系到像素坐标系的坐标转换关系如下所示
$$
d
x
dx
d x
d
y
dy
d y
x
y
xy
x y
K
i
n
t
:
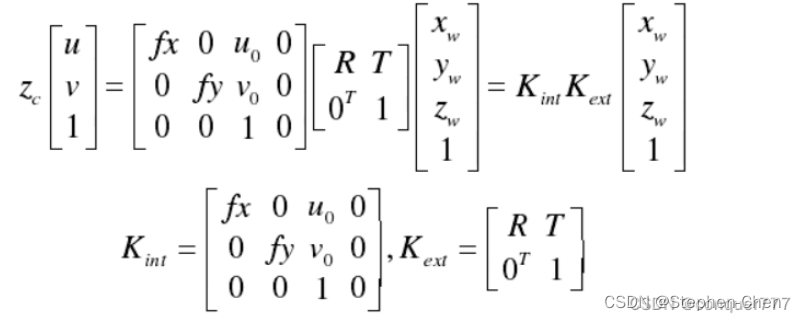
K_{int}:
K in t :
f
x
=
f
/
d
x
,
f
y
=
f
/
d
y
f_x = f/d_x ,f_y = f/d_y
f x = f / d x , f y = f / d y
K
e
x
t
:
K_{ext}:
K e x t : 刚体运动中的变换矩阵 。其中 R 为旋转矩阵
(
R
−
1
=
R
T
)
(R^{-1}= R^T)
( R − 1 = R T )
R
、
T
R、T
R 、 T
calib文件是相机、雷达、Imu等传感器的矫正数据
P0: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 0.000000000000e+00 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
P1: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 -3.875744000000e+02 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
P2: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 4.485728000000e+01 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 2.163791000000e-01 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 2.745884000000e-03
P3: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 -3.395242000000e+02 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 2.199936000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 2.729905000000e-03
R0_rect: 9.999239000000e-01 9.837760000000e-03 -7.445048000000e-03 -9.869795000000e-03 9.999421000000e-01 -4.278459000000e-03 7.402527000000e-03 4.351614000000e-03 9.999631000000e-01
Tr_velo_to_cam: 7.533745000000e-03 -9.999714000000e-01 -6.166020000000e-04 -4.069766000000e-03 1.480249000000e-02 7.280733000000e-04 -9.998902000000e-01 -7.631618000000e-02 9.998621000000e-01 7.523790000000e-03 1.480755000000e-02 -2.717806000000e-01
Tr_imu_to_velo: 9.999976000000e-01 7.553071000000e-04 -2.035826000000e-03 -8.086759000000e-01 -7.854027000000e-04 9.998898000000e-01 -1.482298000000e-02 3.195559000000e-01 2.024406000000e-03 1.482454000000e-02 9.998881000000e-01 -7.997231000000e-01
b
x
(
i
)
b^{(i)}_ x
b x ( i )
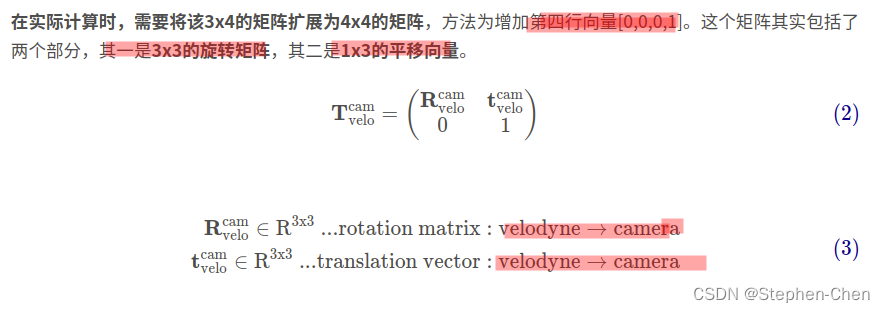
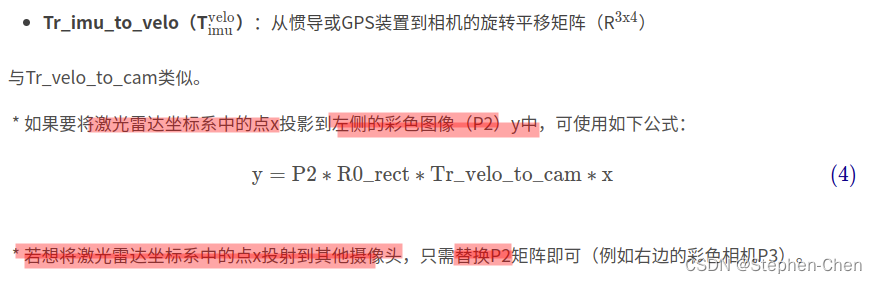
Tr_velo_to_cam:(
T
v
e
l
o
c
a
m
T_{velo}^{cam}
T v e l o c am
R
3
∗
4
R^{3*4}
R 3 ∗ 4 :
label文件是KITTI中object的标签和评估数据,以“000001.txt”文件为例,包含样式如下:
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56
Car 0.00 0 1.85 387.63 181.54 423.81 203.12 1.67 1.87 3.69 -16.53 2.39 58.49 1.57
Cyclist 0.00 3 -1.65 676.60 163.95 688.98 193.93 1.86 0.60 2.02 4.59 1.32 45.84 -1.55
DontCare -1 -1 -10 503.89 169.71 590.61 190.13 -1 -1 -1 -1000 -1000 -1000 -10
DontCare -1 -1 -10 511.35 174.96 527.81 187.45 -1 -1 -1 -1000 -1000 -1000 -10
DontCare -1 -1 -10 532.37 176.35 542.68 185.27 -1 -1 -1 -1000 -1000 -1000 -10
DontCare -1 -1 -10 559.62 175.83 575.40 183.15 -1 -1 -1 -1000 -1000 -1000 -10
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56第1列 (字符串):代表物体类别(type)DontCare标签表示该区域没有被标注 ,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略DontCare区域的预测结果。
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56第2列 (浮点数):代表物体是否被截断(truncated)
Truck 0.00 0 -1. -1.57 57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56第3列(整数 ):代表物体是否被遮挡(occluded)
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56第4列(弧度数) :物体的观察角度(alpha)
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56第5~8列(浮点数 ):物体的2D边界框大小(bbox)
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56第9~11列(浮点数 ):3D物体的尺寸(dimensions)
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56第12-14列 (浮点数):3D物体的位置(location)
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56
第16列(浮点数 ):检测的置信度(score)
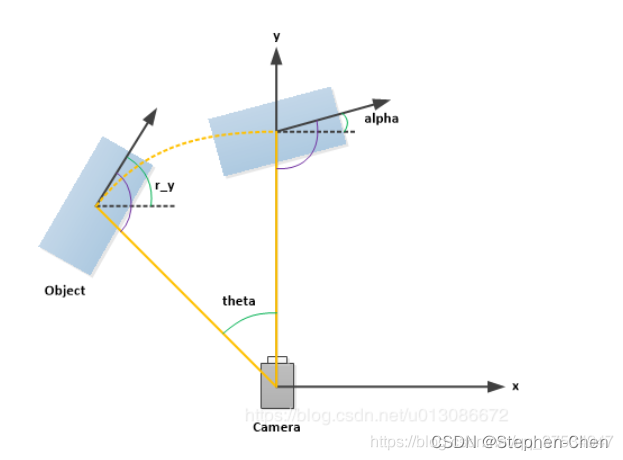
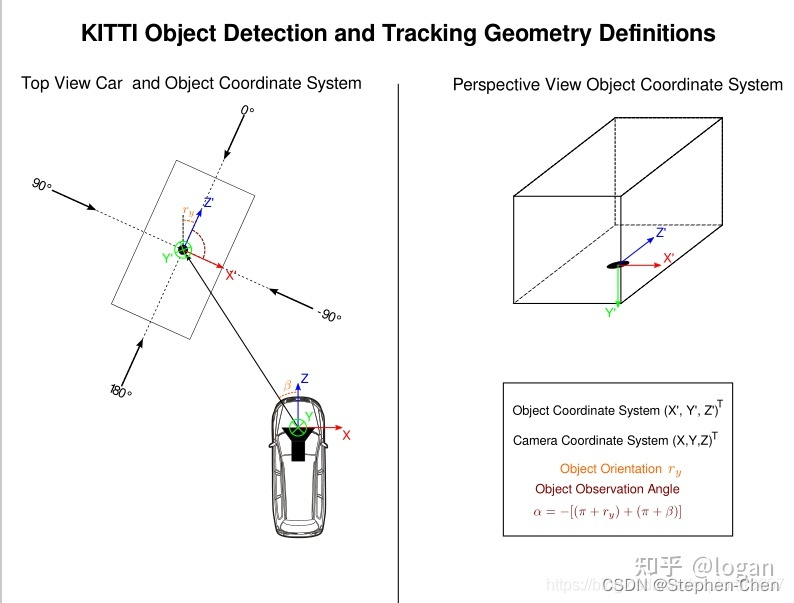
里面的rotation_y和alpha容易让人弄错,下面详细介绍一下
rotation_y表示物体的全局方向角 ,是对物体朝向的一个表示,描述的是目标在现实世界中的朝向,不随目标位置的变化而变化,数值上为车头方向和相机X轴正方向的夹角(顺时针方向为正) ,路面上的物体肯定都在X_Z上,所以物体的朝向只有Y轴的变化。
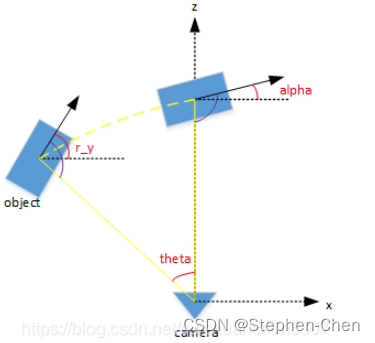
alpha表示物体的观察角度 ,描述的是目标相对于相机视角的朝向,且会随着方位角theta变化而变化,求取方法为在相机坐标系下,以相机原点为中心,相机原点到物体中心的连线为半径,将物体绕相机y轴旋转至相机z轴,此时物体方向与相机x轴的夹角。
r_y + pi/2 -theta = alpha +pi/2(即图中紫色的角是相等的)
alpha + theta = rotation_y
参考文献:
[kitti参数](https://zhuanlan.zhihu.com/p/403188378)3d目标检测中的旋转角/航向角θ应该如何理解? Rope3D数据集