引言
报错: *** No rule to make target '../Thirdparty/g2o/lib/libg2o.so', needed by '../lib/libygz-SLAM.so'。 停止。

显然是g2o库编译安装失败。解决方法参考,这个Issues是pangolin的错误,但是错误类型一样,他的解决方法就是单独对其进行编译,进一步查找错误。
解决方法
对g2o单独进行编译:
mkdir build && cd build
cmake ..
make -j8
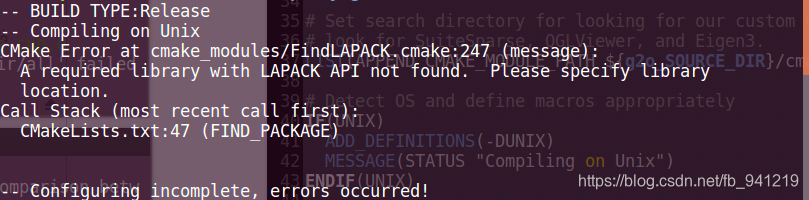
进一步发现是依赖库LAPACK找不到,这个是自己前段时间搞破坏了,相应的解决方法参考博客,即是删除cmake_modules文件夹里面的FindLAPACK.cmake文件,然后修改上一级的CMakeLists.txt文件:
#FIND_PACKAGE(LAPACK REQUIRED)
SET(LAPACK_DIR /usr/local/lib/cmake/lapack-3.8.0)
注释掉FIND_PACKAGE(LAPACK REQUIRED),手动添加LAPACK库的路径。成功解决问题。