Pixhawk简介
pixhawk是由3DR联合APM小组与PX4小组于2014年推出的飞控PX4的升级版,它同时拥有PX4和APM两套固件和相应的地面站软件。该飞控是目前全世界飞控产品中硬件规格最高的产品。
Pixhawk基础
端口介绍
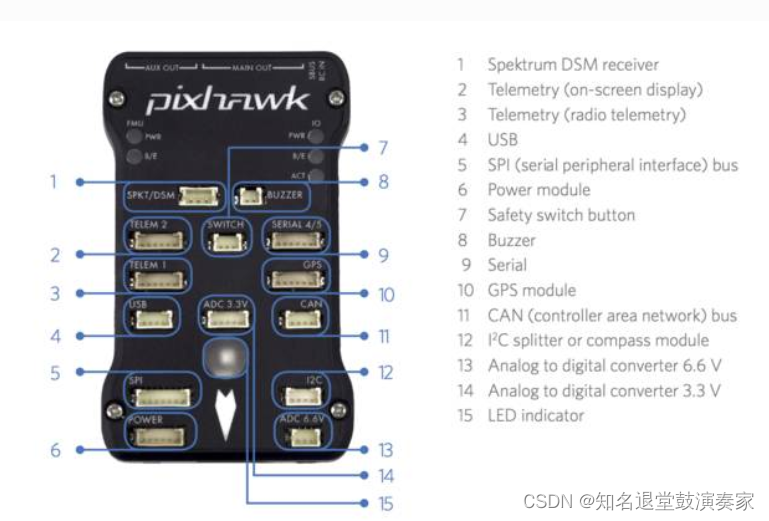
1、Spektrum DSM receiver(Spektrum DSM信号转换为PWM信号接口),主要作用是将Spektrum DSM信号转换为可用于Pixhawk2.4.8的PWM信号。这是因为Pixhawk2.4.8上的PWM输入必须接收来自遥控器或接收机的PWM信号。
2-3、Telemetry(遥测):Telemetry接口是Pixhawk飞控上用于与地面站通信的接口。它可以用来传输飞控的状态、传感器数据、GPS数据、电池电量、飞行日志等信息。通过这个接口,地面站可以实时监测和控制飞行器,比如调整姿态、飞行模式、飞行高度等。常见的Telemetry接口包括UART、USB、WiFi、蓝牙等,根据不同的需求和使用环境可以选择不同的接口。
4、USB:USB通信端口
5、SPI(Serial Peripheral Interface)串行通信接口:SPI通信协议是一种高速数据传输协议,可以实现飞控与其他设备之间的快速数据传输。Pixhawk飞控上的SPI端口可以用于连接SPI设备,例如惯性测量单元(IMU)和外部飞行控制器。它通常用于需要高速数据传输的应用程序,如高速旋翼和高速固定翼飞行器。
6、power(电源):电源连接端口,给飞控供电的端口,Power端口上的两个引脚是正极和负极,根据电池或电源模块的极性正确连接。
7、SWITCH(开关接口):SWITCH(开关)端口是 Pixhawk 上可编程的 GPIO(通用输入/输出)端口之一,可以通过遥控器、地面站或其他外部设备控制。在 Pixhawk 上,SWITCH 端口可以用于许多不同的用途,例如:(1)飞行模式切换:可以将飞行模式切换分配给一个开关,例如手动、定高、定点等。(2)、ARM/解锁:可以将 ARM/解锁操作分配给一个开关,以便在起飞前解锁飞机或在飞行中急停。(3)其他:可以将其他功能,例如照相机快门控制、灯光开关等,分配给开关。
8、BUZZER(蜂鸣器):buzzer端口是一个可编程的音响输出端口。它可以连接到一个蜂鸣器,用于发出警告、提醒、状态提示等声音。在Pixhawk上,buzzer端口通常用于发出飞行器状态提示音和警告声,例如飞行器起飞和降落的音效、电池电量低的提示音等。用户也可以根据需要通过软件自定义其他声音输出。
9、Serial4/5(扩展串口):用于连接其他外部设备,如GPS、气压计、遥控器等。这两个串口是带有硬件流控制的UART接口,支持多种协议,例如Mavlink、FrSky等。其中Serial4接口默认为GPS接口,Serial5接口默认为第5个RC通道。
10、GPS(GPS模块接口):用于连接GPS模块,一般采用UART协议进行通信,可以连接支持NMEA协议的GPS模块。
11、CAN(Controller Area Network)串行通信总线标准接口:在Pixhawk中,CAN接口用于连接其他设备,例如遥控器、电调、电机等,可以用于连接多种类型的CAN设备,从而提高飞控的功能和性能。例如,可以通过CAN接口连接电机控制器,实现更精确的电机控制和监测。此外,CAN接口还可以用于与其他飞控进行通信,实现更复杂的飞行控制任务。
12、I2C(Inter-Integrated Circuit):I2C接口是一种串行通信协议,用于连接多个设备,例如传感器和其他外设。在Pixhawk飞控中,I2C接口通常用于连接外部磁罗盘、气压计、光流传感器等。它具有简单、高效、可靠、使用线缆数量少等优点,常用于连接较短距离的设备。Pixhawk飞控中一般有多个I2C接口可供使用。
13、ADC 6.6V(Analog-to-Digital Converter)模拟数字转换器:ADC 6.6V是Pixhawk飞控上的一个输入端口,它用于接收最高6.6V的模拟电压信号,并将其转换为数字信号进行处理。在飞控中,ADC 6.6V端口通常用于接收电池电压等模拟信号,以便飞控可以监测电池电量并作出相应的反应。如果连接了适当的传感器,ADC 6.6V端口也可以用于监测其他模拟信号,例如温度、气压等。注意,ADC 6.6V端口不能接收超过6.6V的电压信号,否则可能会导致损坏。
14、ADC 3.3V(Analog-to-Digital Converter)模拟数字转换器:ADC 3.3V指的是模拟数字转换器的3.3V电压输入端口。Pixhawk上有两个ADC输入端口,一个是ADC 6.6V,另一个是ADC 3.3V。ADC的作用是将模拟信号转换为数字信号,以便飞控可以对其进行处理和分析。在Pixhawk上,ADC端口可用于连接一些传感器,如电压和电流传感器,以测量电池电量和电机的负载等信息。ADC 3.3V端口接受3.3V电压输入,一般用于连接低电压的传感器。
15、LED:LED指示灯,可以根据灯的颜色、闪烁状态判断飞控当前情况。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)