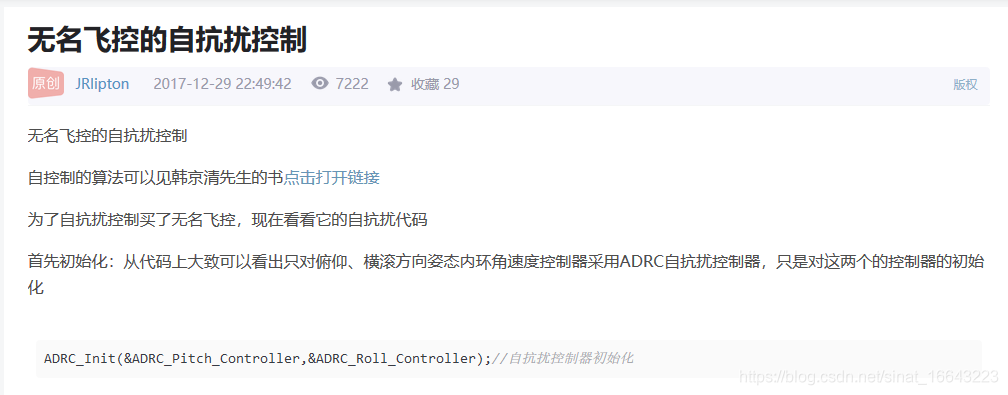
最开始是看到无名用ADRC
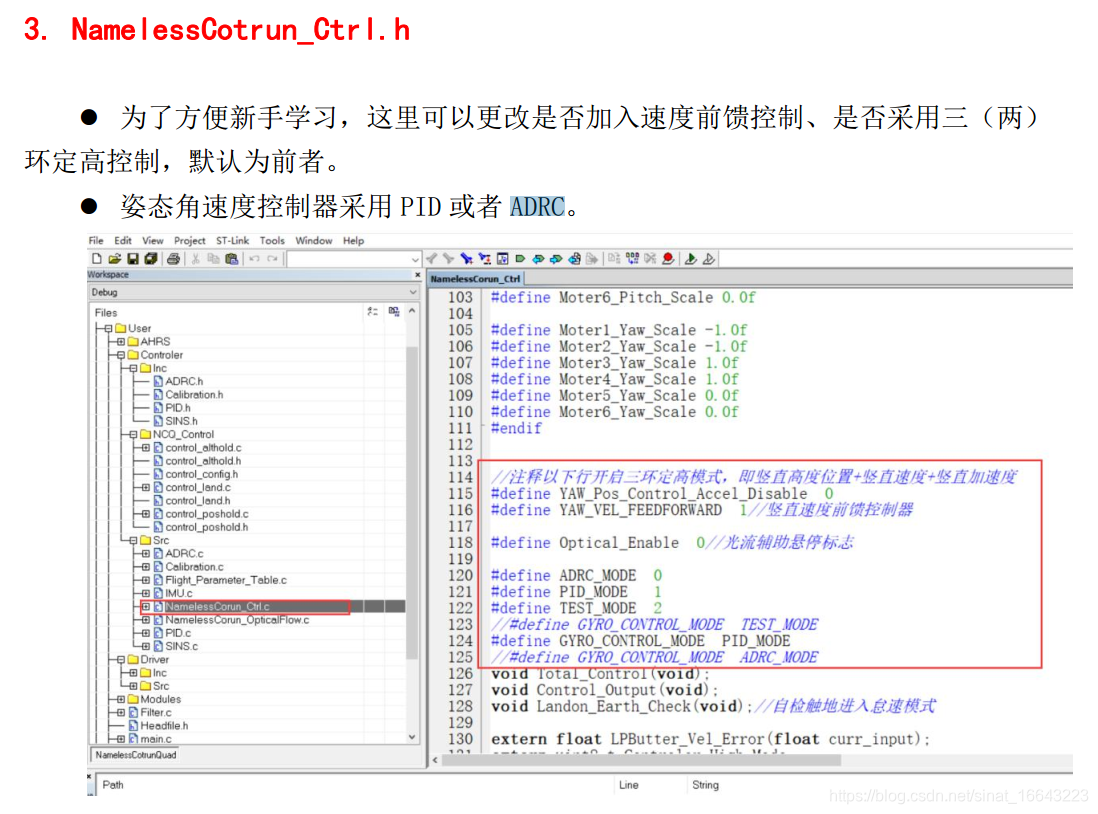
无名似乎17年就开始弄ADRC了
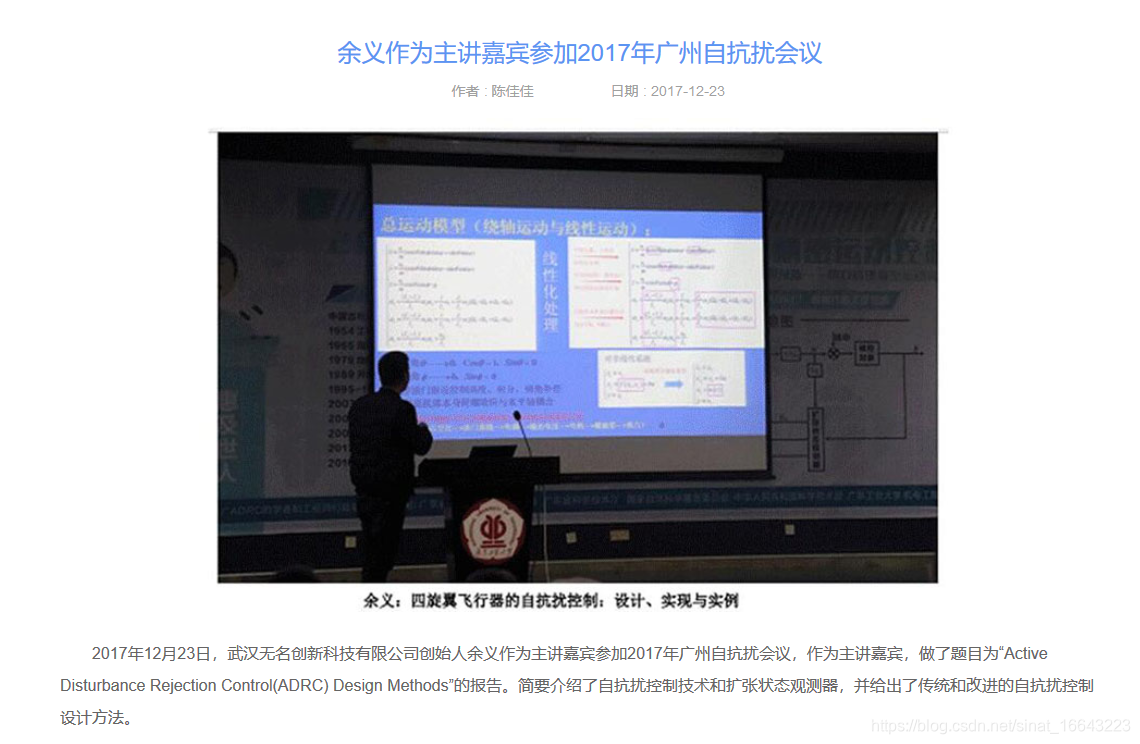
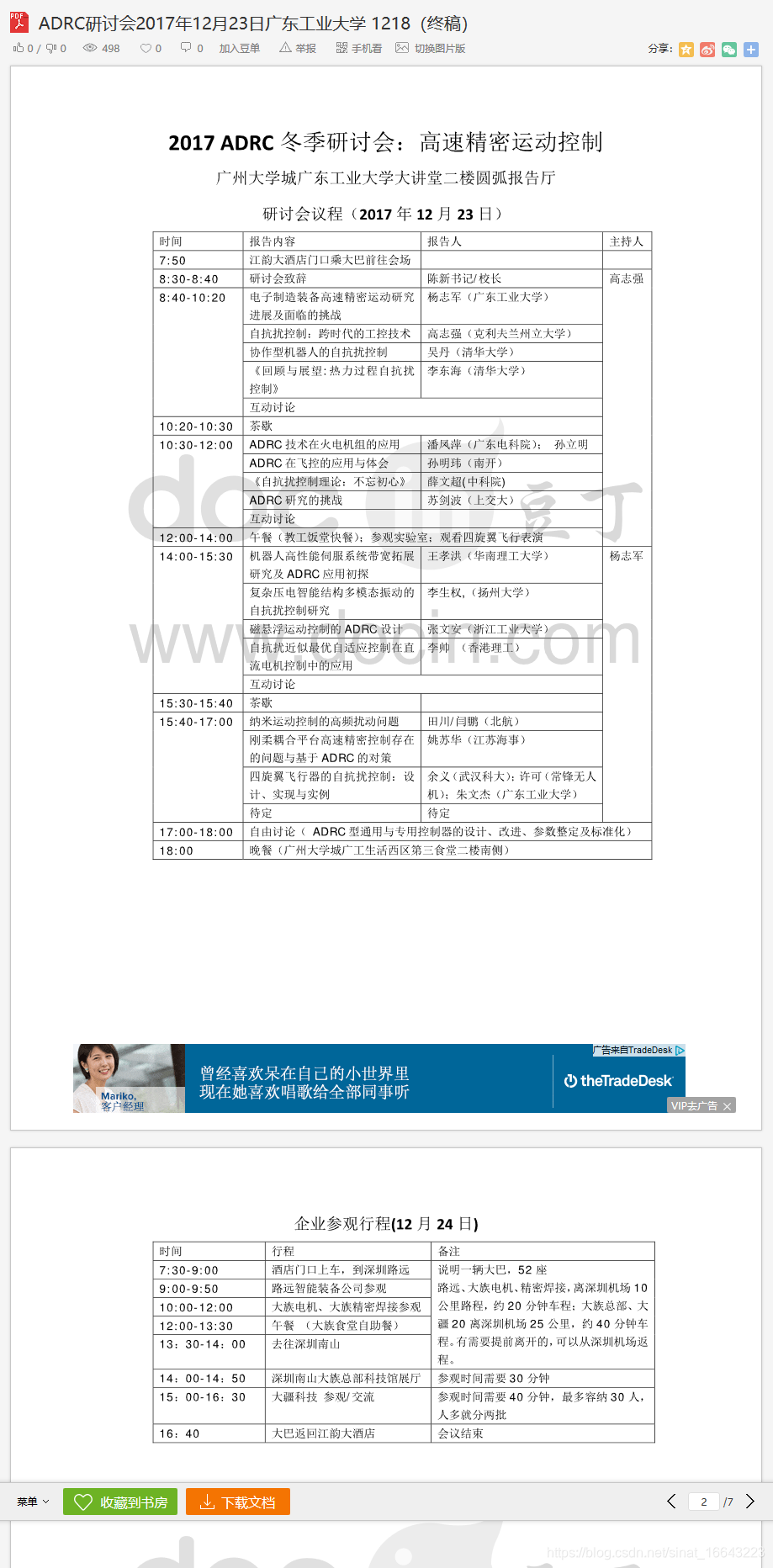
http://www.docin.com/p-2101934503.html
ACfly和无名他们确实早就认识

https://blog.csdn.net/wang2012113132/article/details/78935444?utm_medium=distribute.pc_relevant_right.none-task-blog-BlogCommendFromMachineLearnPai2-7.nonecase&depth_1-utm_source=distribute.pc_relevant_right.none-task-blog-BlogCommendFromMachineLearnPai2-7.nonecase

现在看到这么多都在讲ADRC,看来大家是认同的。
这款无人机号称只用调一个参数就可以了,我也是很好奇。

我刚刚发现无名也在ACfly的群里还是管理员,看来他们都是一起的。。。

匿名似乎也在弄ADRC,也弄了个单参数调参。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)