一.安装测试librealsense SDK 2.0
注册公匙
sudo apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
添加repositories(Ubuntu 16 LTS)
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
安装library
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
安装developer和debug packages
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
测试SDK
realsense-viewer
二.安装测试realsense
cd ~/catkin_ws/src
git clone https://github.com/intel-ros/realsense.git
cd ..
catkin_make
rospack profile
source devel/setup.sh
三.安装测试VINS-Mono
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
cd ..
catkin_make
source ~/catkin_ws/devel/setup.bash
三.在D435i上运行VINS-Mono
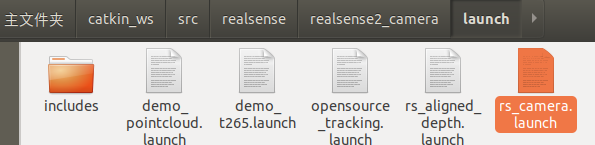
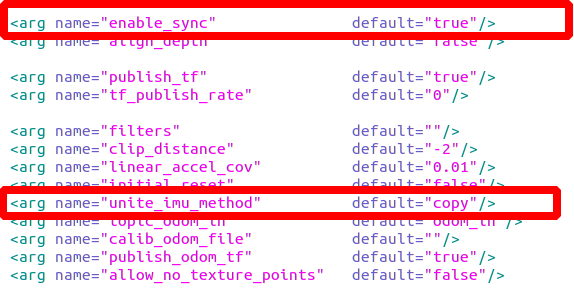
1.修改realsense包里的rs_camera.launch文件
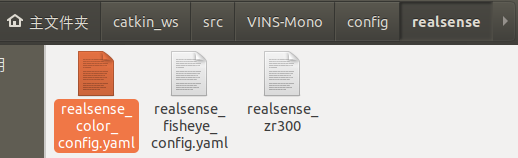
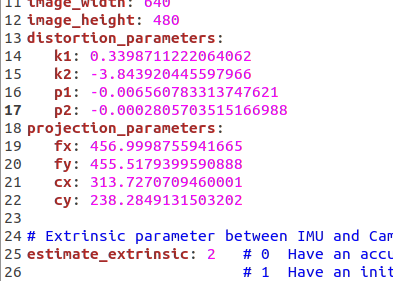
2.修改VINS-Mono包里的realsense_color_config.yaml文件
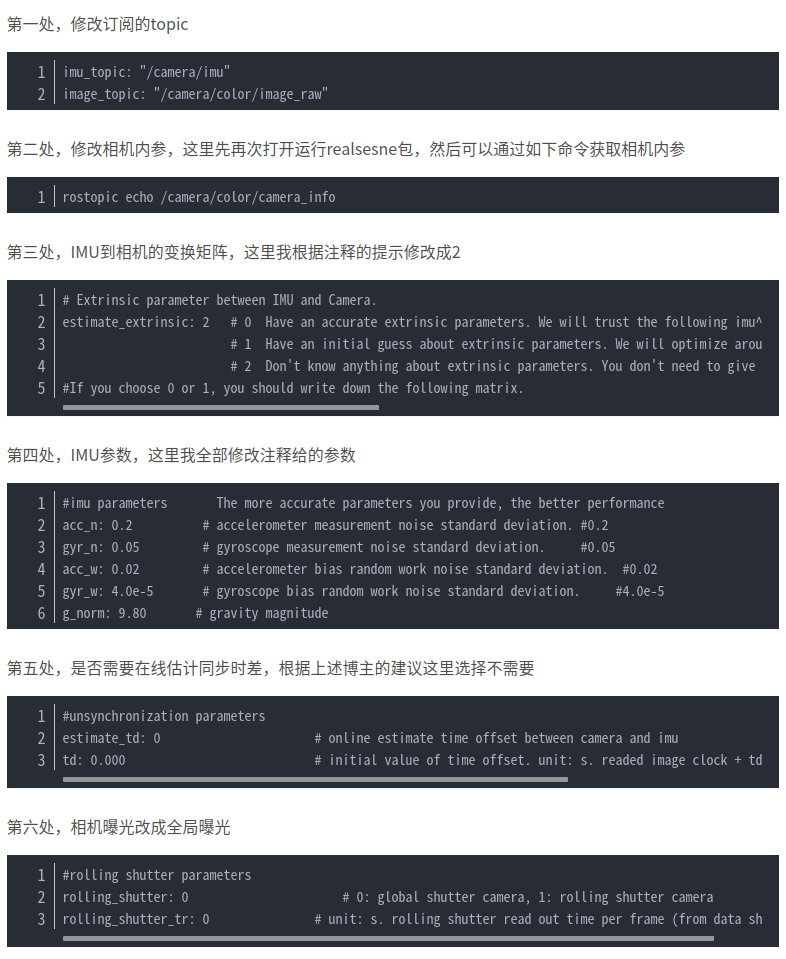
第二处我自己的相机内参为:
五.运行VINS-Mono
roslaunch realsense2_camera rs_camera.launch
roslaunch vins_estimator realsense_color.launch
roslaunch vins_estimator vins_rviz.launch
运行结果(GIF动图):
 参考博文:从零开始使用Realsense D435i运行VINS-Mono
参考博文:从零开始使用Realsense D435i运行VINS-Mono