转载自:https://blog.csdn.net/weixin_41469272/article/details/117919845?utm_medium=distribute.pc_relevant_t0.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-1.essearch_pc_relevant&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-1.essearch_pc_relevant
realsense D435i gazebo slam(px4)仿真
Nie_Xun 2021-06-15 11:27:31
306
收藏 1
版权
文章目录
-
- realsense D435i gazebo slam仿真
-
- 下载realsense 仿真模型
- 运行D435仿真环境测试
-
- slam仿真示例
-
realsense D435i gazebo slam仿真
包含realsense T265 D435i的urdf和sdf文件、realsense_gazebo_plugin包及realsense 模型文件使用示例。
下载realsense 仿真模型
[catkin_ws]表示自定义的工作目录
mkdir -p [catkin_ws]/src
cd [catkin_ws]/src
git clone https://gitee.com/nie_xun/realsense_ros_gazebo.git
cd [catkin_ws]
catkin_make
source devel/setup.sh
运行D435仿真环境测试
D435
roslaunch realsense_ros_gazebo simulation_sdf.launch
运行结果:
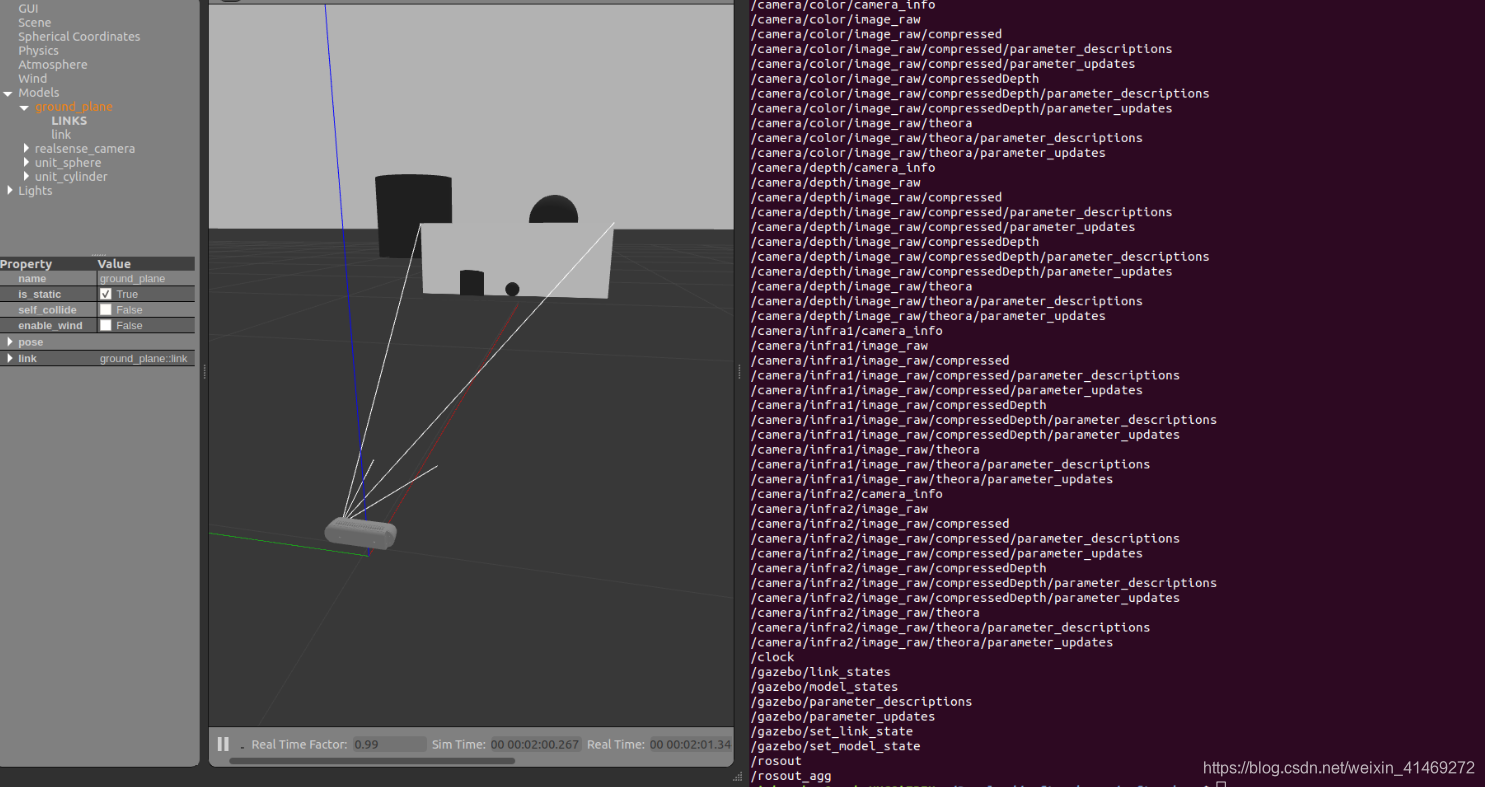
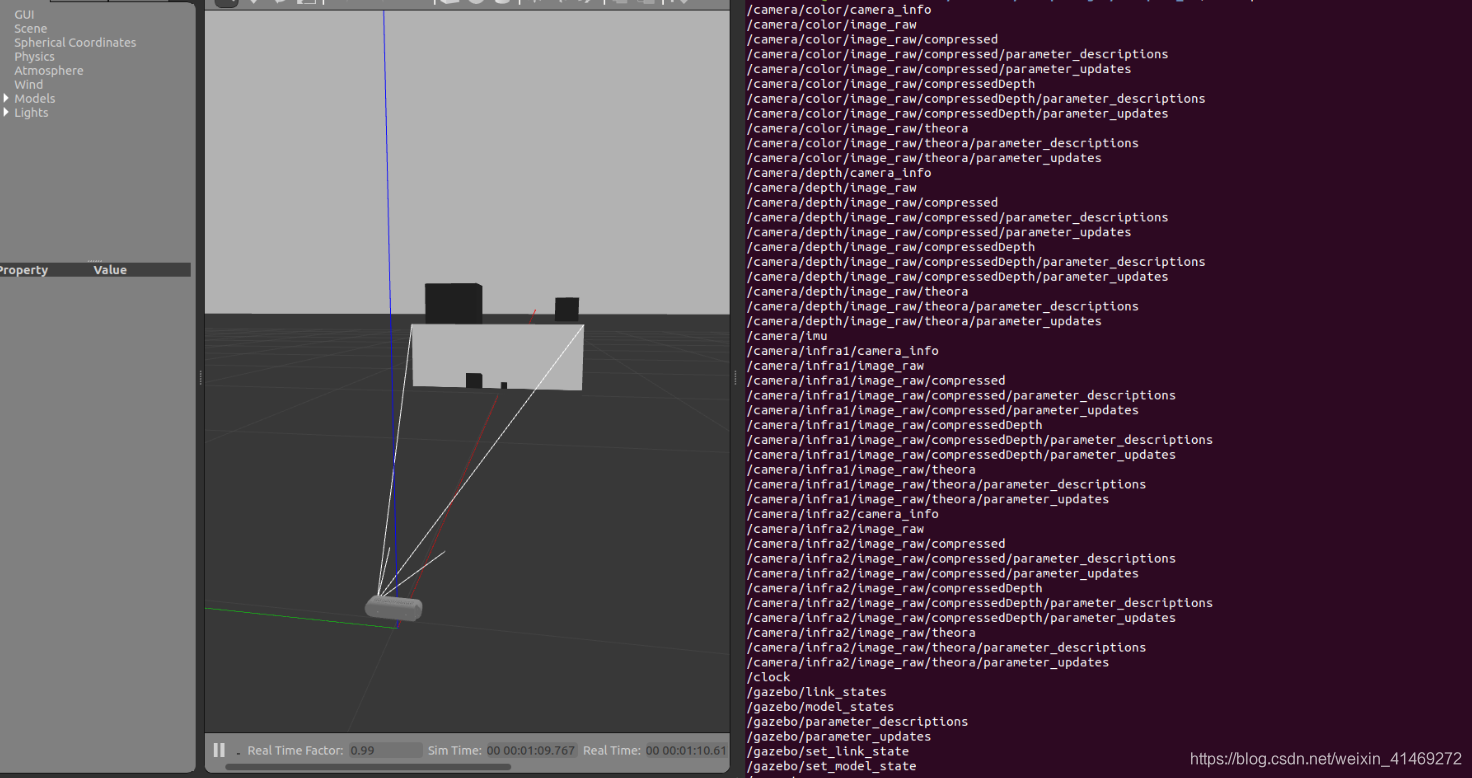
D435i
相比D435多一个camera/imu topic
roslaunch realsense_ros_gazebo simulation_D435i_sdf.launch
slam仿真示例
UAV模型启动
本示例使用px4的iris 无人机模型作为示例,本文使用的Firmware为v1.8版本。
在realsense_ros_gazebo的sdf文件夹下已存放携带D435i的iris sdf文件。
以下[px4]为px4 对应的Firmware的根路径
- 在[px4]/launch下生成文件iris_realsense_camera_px4_mavros_vo.launch,内容如下:
<?xml version="1.0"?>
<launch>
<arg name="x" default="0"/>
<arg name="y" default="0"/>
<arg name="z" default="0"/>
<arg name="R" default="0"/>
<arg name="P" default="0"/>
<arg name="Y" default="0"/>
<!-- vehicle model and world -->
<arg name="est" default="ekf2"/>
<arg name="vehicle" default="iris"/>
<arg name="world" default="$(find px4)/Tools/sitl_gazebo/worlds/empty.world"/>
<arg name="sdf" default="$(find px4)/Tools/sitl_gazebo/models/iris_realsense_camera/iris_realsense_camera.sdf"/>
<arg name="rcS" default="$(find px4)/posix-configs/SITL/init/$(arg est)/$(arg vehicle)_vo"/>
<!-- gazebo configs -->
<arg name="gui" default="true"/>
<arg name="debug" default="false"/>
<arg name="verbose" default="false"/>
<arg name="paused" default="false"/>
<arg name="respawn_gazebo" default="false"/>
<!-- MAVROS configs -->
<arg name="fcu_url" default="udp://:14540@localhost:14557"/>
<arg name="respawn_mavros" default="false"/>
<!-- PX4 configs -->
<arg name="interactive" default="true"/>
<!-- PX4 SITL and Gazebo -->
<include file="$(find px4)/launch/posix_sitl.launch">
<arg name="x" value="$(arg x)"/>
<arg name="y" value="$(arg y)"/>
<arg name="z" value="$(arg z)"/>
<arg name="R" value="$(arg R)"/>
<arg name="P" value="$(arg P)"/>
<arg name="Y" value="$(arg Y)"/>
<arg name="world" value="$(arg world)"/>
<arg name="vehicle" value="$(arg vehicle)"/>
<arg name="sdf" value="$(arg sdf)"/>
<arg name="rcS" value="$(arg rcS)"/>
<arg name="gui" value="$(arg gui)"/>
<arg name="interactive" value="$(arg interactive)"/>
<arg name="debug" value="$(arg debug)"/>
<arg name="verbose" value="$(arg verbose)"/>
<arg name="paused" value="$(arg paused)"/>
<arg name="respawn_gazebo" value="$(arg respawn_gazebo)"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="gcs_url" value=""/>
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="respawn_mavros" value="$(arg respawn_mavros)"/>
</include>
</launch>
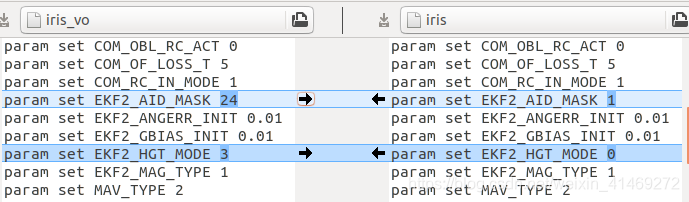
- 在[px4]//posix-configs/SITL/init/ekf2下生成iris_vo,操作如下:
cd [px4]//posix-configs/SITL/init/ekf2
cp iris iris_vo
将EKF2_AID_MASK和EKF2_HGT_MODE对应项改成:
param set EKF2_AID_MASK 24
param set EKF2_HGT_MODE 3
- 拷贝模型文件到px4
cp realsense_ros_gazebo/sdf/* [px4]/Tools/sitl_gazebo/models/ -r
- 启动
roscd px4/launch
roslaunch iris_realsense_camera_px4_mavros_vo.launch
slam启动
- 需要将slam的odom输出remap到/mavros/vision_pose/pose
1)如果slam输出使用的odom消息类型为geometry_msgs::PoseStamped,且坐标系为(NWU: x:前;y:左;z:上)则直接在slam的launch文件中发布odom消息的node下加入以下内容:
<remap from="/camera/odom" to="/mavros/vision_pose/pose" />
2)本文使用的slam坐标系为WUN,发布的odom消息类型为/camera/odometry
使用的转换代码文件如下:
nav_msg_to_mavros.cpp
#include <iostream>
#include <ros/ros.h>
#include <geometry_msgs/Pose.h>
#include <geometry_msgs/PoseStamped.h>
#include <nav_msgs/Odometry.h>
ros::Publisher camera_pose_publisher;
int data_source;
enum {
GAZEBO_GT = 0,
CAMERA_VO = 1
};
void vision_cb(const nav_msgs::Odometry::ConstPtr &msg)
{
geometry_msgs::PoseStamped msg_body_pose;
if (data_source == GAZEBO_GT) {
// 0 means use gazebo grougtruth
msg_body_pose.header.stamp = msg->header.stamp;
msg_body_pose.header.frame_id = "world";
msg_body_pose.pose.position.x = msg->pose.pose.position.x;
msg_body_pose.pose.position.y = msg->pose.pose.position.y;
msg_body_pose.pose.position.z = msg->pose.pose.position.z;
msg_body_pose.pose.orientation.x = msg->pose.pose.orientation.x;
msg_body_pose.pose.orientation.y = msg->pose.pose.orientation.y;
msg_body_pose.pose.orientation.z = msg->pose.pose.orientation.z;
msg_body_pose.pose.orientation.w = msg->pose.pose.orientation.w;
} else if (data_source == CAMERA_VO) {
// 1 means use camera vo
// Create PoseStamped message to be sent
msg_body_pose.header.stamp = msg->header.stamp;
msg_body_pose.header.frame_id = "world";
msg_body_pose.pose.position.x = msg->pose.pose.position.z;
msg_body_pose.pose.position.y = msg->pose.pose.position.x;
msg_body_pose.pose.position.z = msg->pose.pose.position.y;
msg_body_pose.pose.orientation.x = msg->pose.pose.orientation.z;
msg_body_pose.pose.orientation.y = msg->pose.pose.orientation.x;
msg_body_pose.pose.orientation.z = msg->pose.pose.orientation.y;
msg_body_pose.pose.orientation.w = msg->pose.pose.orientation.w;
}
// Publish pose of body frame in world frame
camera_pose_publisher.publish(msg_body_pose);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "vision_to_mavros");
ros::NodeHandle nh("~");
nh.param<int>("data_source", data_source, 0);
ros::Subscriber gazebo_sub = nh.subscribe<nav_msgs::Odometry>("/camera/odometry", 50, vision_cb);
camera_pose_publisher = nh.advertise<geometry_msgs::PoseStamped>("/mavros/vision_pose/pose", 50);
ros::spin();
}
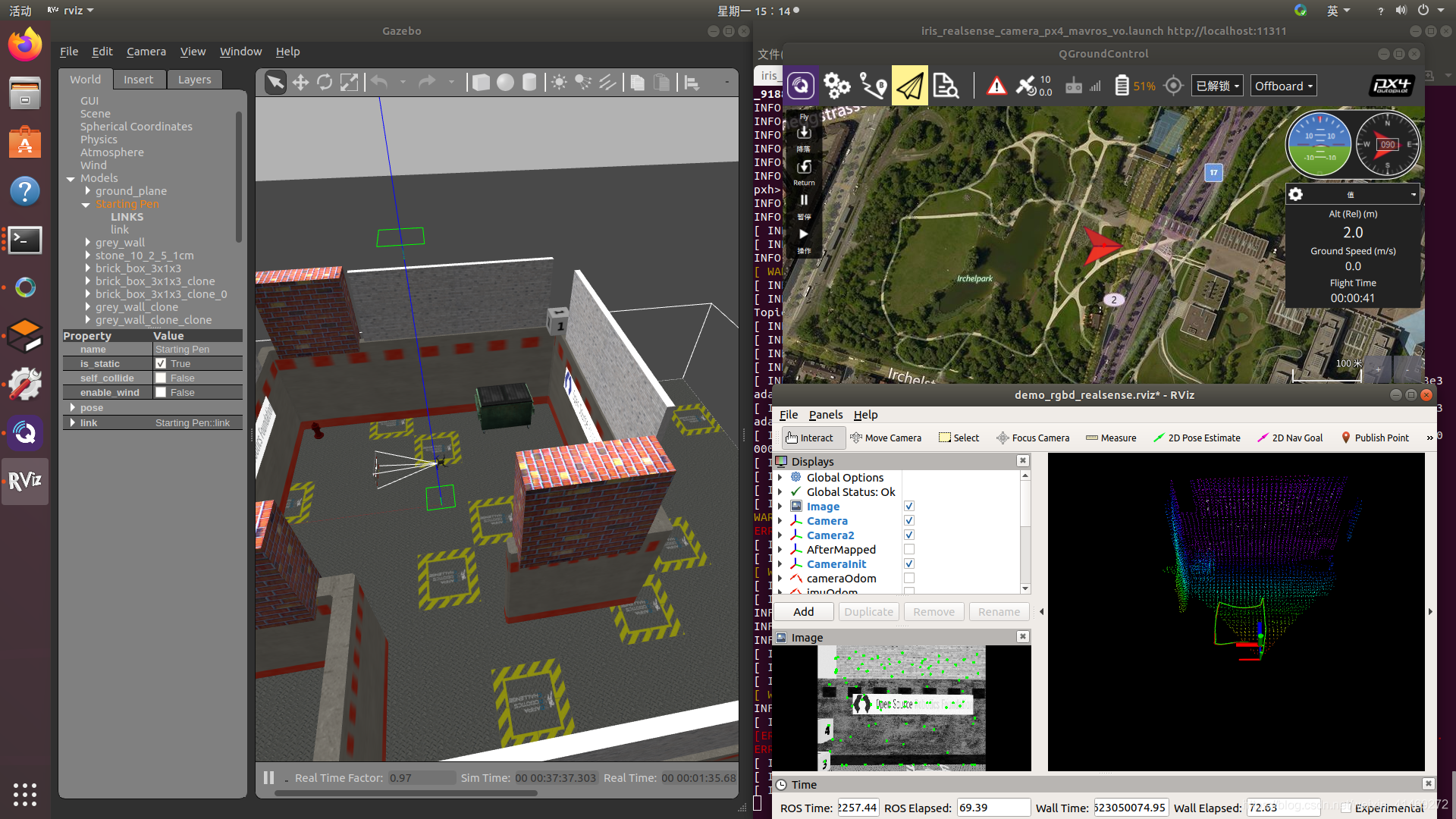
2.启动想使用的slam
结果示例:
其他
mavros px4 坐标转换
mavros:enu
px4:ned
在外部传感器定位,非GPS自身定位,世界坐标系由外部传感器定义。
如optirack,使用自身的定义的原点坐标系,由定义原点时,使用的定位杆长短轴及motive软件的Y/Z up综合定义。
Y up: 前(Z+), 左(X+), 上(Y+) 。
Z up: 在Y up的坐标系基础上绕x轴旋转-90度。Z up即使用的enu的坐标系。
坐标系的定位也有相对之分,比如optirack相对于GPS坐标系就是相对坐标系,GPS作为地球坐标系(更大的坐标系)则作为绝对坐标系,当使用相机定位做对比实验,则又能将optirack看做绝对坐标系,相机坐标系作为相对坐标系。
f:first l:left b:back u:up
因此像enu end这种坐标系更多的是说明xyz三轴的相对关系,比如(flu, lbu)都是一种enu坐标系,更多的是说明机体坐标系来用的。如下图所示:通过旋转后的坐标系,满足三轴规则,还是enu坐标系。

当optirack vo等相对局部的坐标系只要满足xyz的右手关系,即,食指指向x,对应中指就指向y, 大拇指就是z方向。则就满足enu坐标系。
当无人机以固件启动时作为原点,偏航初始化为0,当无人机以外部传感器作为定位及yaw的输入时(roll pitch由无人机自身imu获得),需要对准机头方向,使外部传感器得到的偏航和机体得到的偏航一致。
例子1:外部定位使用optirack,Zup(enu), 将初始化时将机头于optirack的x轴对齐,则直接将/vrpn_client_node/<rigid_body_name>/poseremap到mavros/vision_pose/pose即可。
使用mavros/vision_pose发送,mavros采用的enu坐标系,mavros会自动两enu转换到ned坐标系,则初始化时将机头于optirack的x轴对齐,从而能够使px4初始化时,px4解算偏航与optirack解算的机体偏航一致,约为0。或者不对齐时,需减去optirack的偏航测量值再赋值给mavros/vision_pose
例子2:外部定位使用vo,相机前向与无人机绑定,坐标系为(LUF),将vo输出转换到ENU坐标系赋值给mavros/vision_pose/pose,则对应的转换:类似将(LUF->FLU)
poseX = voZ
poseY = voX
poseZ = voY
此时,直接将机头与mavros的enu的初始化x轴对齐了,即将相机的前向(机头方向)作为mavros的x轴。
总结:无论是vo还是optitrack,要保证的是初始化时,机头要对准赋值给mavros/vision_pose的x。mavros/vision_pose在ENU坐标系下。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)