文章目录
- 【目前:系统回退安卓10、CPU贴了硅胶片。一天没重启了】
- 1.问题描述
- 2.分析原因
- 3.解决方案
- 4.实际操作
【目前:系统回退安卓10、CPU贴了硅胶片。一天没重启了】
1.问题描述
荣耀V10,莫名其妙的、无规律的死机重启。
一开始是重启后进入紧急备份,无法正常开机。
之后莫名其妙可以正常开机了,但是总是会重启。
2.分析原因
不搜不知道,一艘网上一大堆华为、荣耀老版本机子自动重启的。甚至有一个圈名,华为重启门。
网上搜集到的原因有:
(1)CPU虚焊:升级鸿蒙导致发热过大导致CPU某些焊点脱焊了
(2)CPU虚焊:华为主板设计的问题,时间旧了,老机子逐渐CPU虚焊
(3)接插件氧化虚焊:还有可能不是CPU的问题,可能是其他接插件虚焊了,比如主板的电池插槽,这种情况看到别人重新插拔,酒精擦拭就好了。
我的手机目前情况是:可以正常启动,但是时不时会重启,没有发现明显的触发条件,所以猜测大概率是CPU虚焊,网上大部分人也是这种情况。
3.解决方案
网上搜集到CPU虚焊解决方案难度从低到高如下:
(1)系统回退:鸿蒙系统回退安卓10 (试了没用),安卓10回退安卓9 (正在试)。
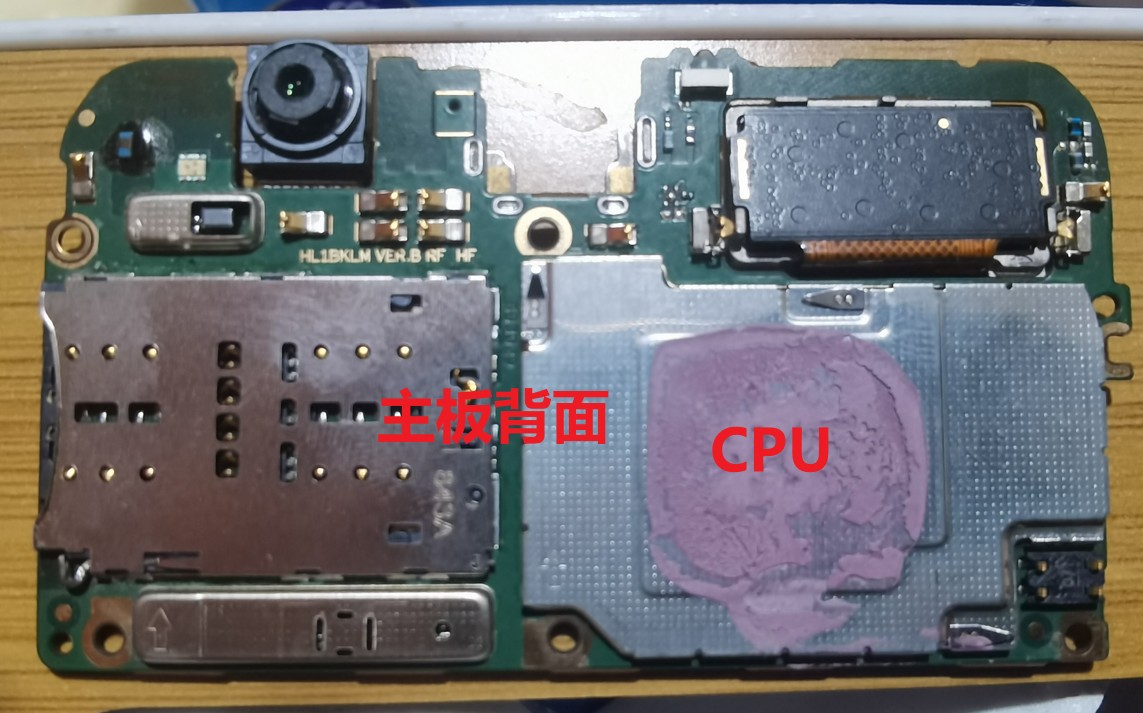
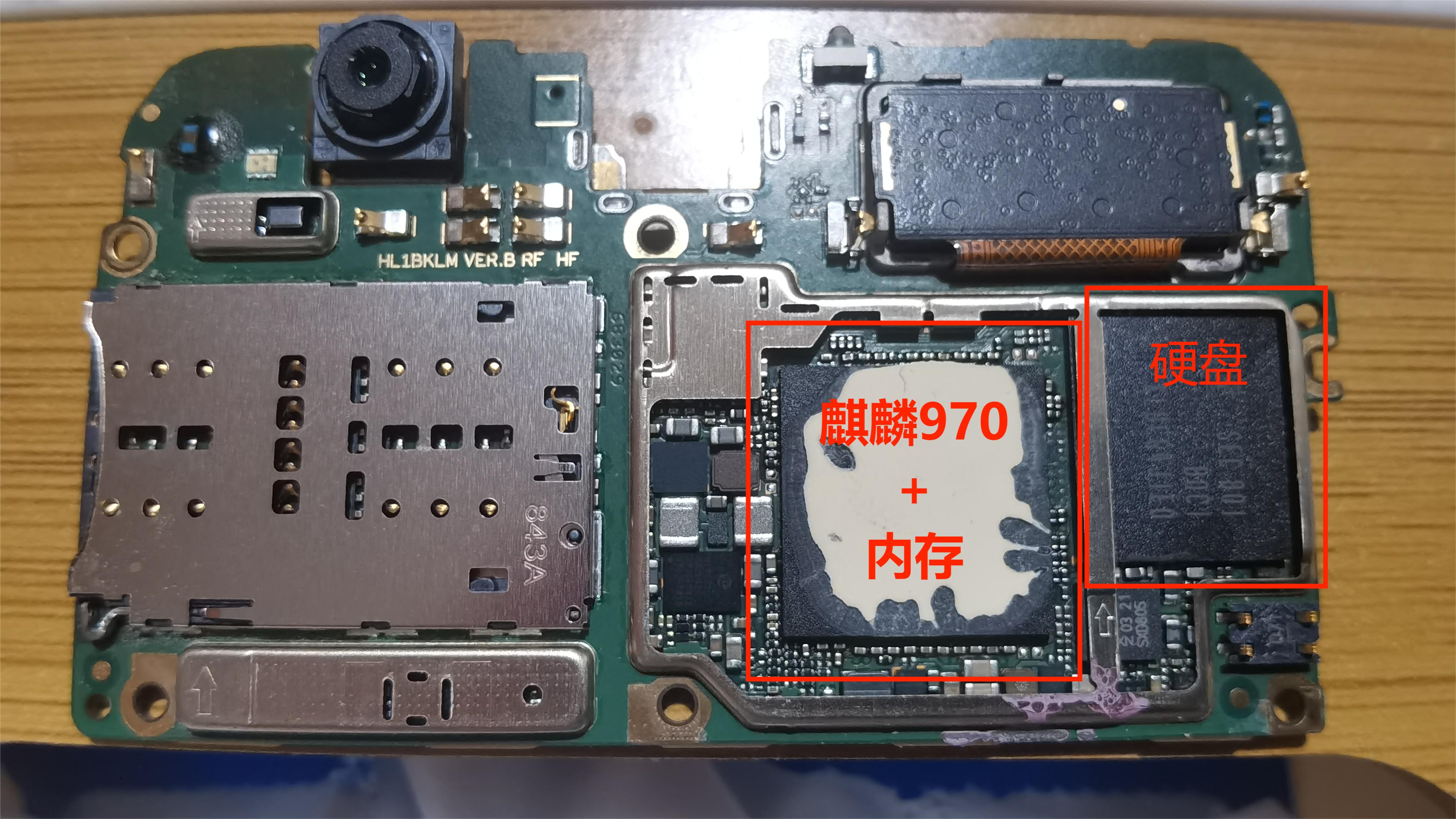
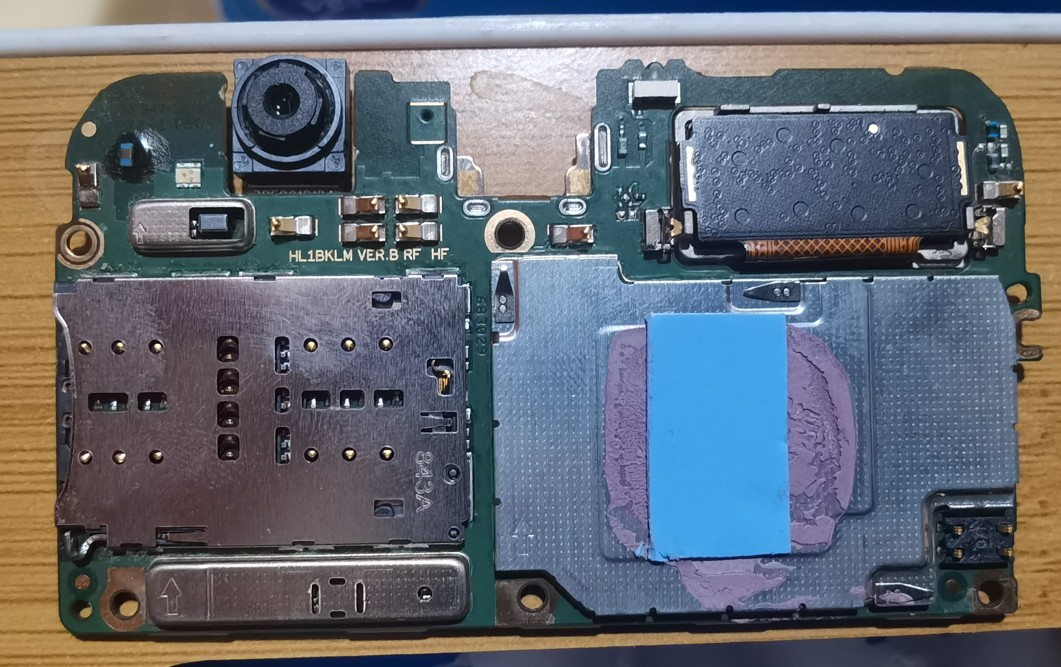
(2)投机取巧法:在哔站看到的一位维修师傅推荐的,把手机主板拆出来,找到CPU,在CPU和防护罩之间贴一片散热硅胶,原理是通过加一片硅胶,把CPU和主板压紧点,也是碰运气。(试了,等时间验证)
(3)CPU植锡:把CPU吹下来,清理掉虚焊氧化的焊点,重新植锡,重新焊接。(最正规的方法,但是风险大。(不敢试),如果上面的简单方法试了都不行,等回去了工具齐全了试一下)
总的来说,法1法2都是碰运气,但是普通人也只能这么操作一下,去找师傅修手机又不值当,这手机现在也就四五百快钱,CPU虚焊修一下至少得要200叭,手机比较贵还算值得去修一下。
4.实际操作
法1:直接百度搜鸿蒙回退安卓,很简单。
法2:需要拆机,需要买散热硅胶片。百度自己手机的拆机教程,大致流程:拆后盖,断电池,拆主板,拆保护壳找CPU,CPU上贴硅胶片。装回去。荣耀V10拆机:
法3:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)