树莓派4B安装 ubuntu20.04 & VNC远程桌面 & 安装ROS noetic
- 1、安装ubuntu
- 方式1:下载Imager文件。
- 方式2:下载镜像文件。
- 2、查询树莓派 IP 地址
- 3、使用ssh远程登录树莓派
- 4、更新源地址
- 5、更新
- 6、安装桌面环境
- 7、允许root登陆
- 8、登陆远程桌面
- 9、设置中文
- 10、安装ROS
- 11、配置环境变量
- 12、构建软件包的依赖关系
1、安装ubuntu
方式1:下载Imager文件。
windows下载:https://downloads.raspberrypi.org/imager/imager_latest.exe
ubuntu下载:https://downloads.raspberrypi.org/imager/imager_latest_amd64.deb
macOS下载:https://downloads.raspberrypi.org/imager/imager_latest.dmg
这是一个Imager文件,大小约18M。

然后选择操作系统,选择 Other general-purpose OS:


选择64位的ubuntu20.04 LTS进行安装:

然后插入SD卡并选择该卡:

右下角的设置按钮可以对树莓派进行配置,建议设置好主机名、开启SSH服务并设置好账号密码(密码建议设置为123456,方便记、方便输入,后面会经常输入密码),并且输入要连接的WIFI的账号密码。


最后点击烧录即可,这步会格式化你的SD卡,会清除掉SD卡的所有数据和内容,所以一定不要选错SD卡。

方式2:下载镜像文件。
地址:https://ubuntu.com/download/raspberry-pi
这个是一个镜像文件,大小约700M,需要另外下载镜像烧录软件。建议下载长期支持版,即带有LTS后缀的版本,可以先下载ubuntu server,后面再另外安装桌面。
win32 Disk Imager 烧录软件下载地址: https://sourceforge.net/projects/win32diskimager/
如果TF卡已有内容,在使用之前需要执行格式化,比如可以使用SD Card Formatter软件:SD Card Formatter下载地址: https://www.sdcard.org/downloads/formatter/



2、查询树莓派 IP 地址
首先,令你的电脑和树莓派处于同一局域网下。
登录进你的路由器管理页面查看树莓派的 IP 地址。
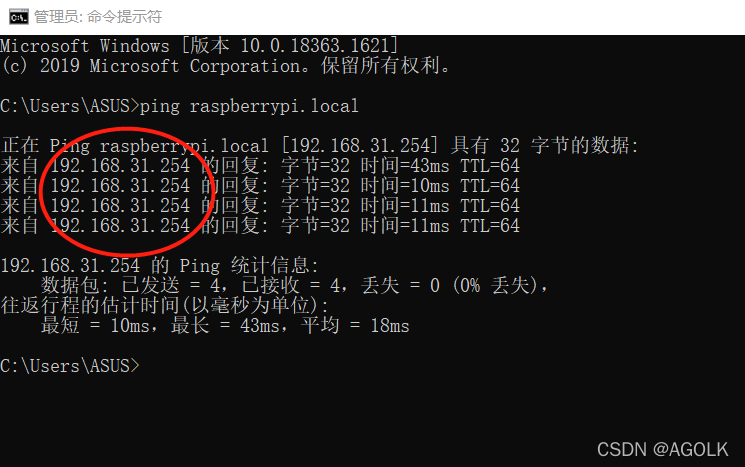
或者命令行输入ping ubuntu.local(此处ubuntu替换为你设置好的主机名),就可以看到 IP 地址了。
3、使用ssh远程登录树莓派
打开windows命令行:win+R,输入cmd,回车。
 命令行输入:
命令行输入:
ssh Username@IP
此处Username改为之前设置好的Username,IP改为树莓派的 IP 地址。
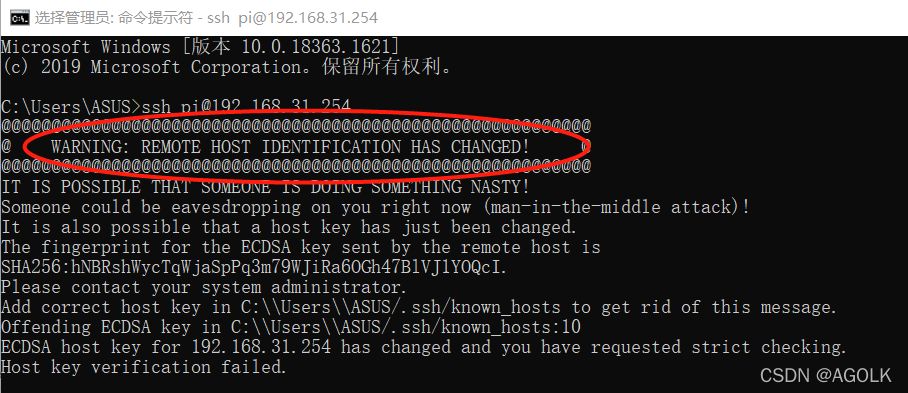
若弹出:(如果没弹出这个提示就跳过这步)
WARNING: REMOTE HOST IDENTIFICATION HAS CHANGED!
则需要输入:ssh-keygen -R IP清除远程主机的公钥(此处IP更改为树莓派 IP)。然后再输入一次ssh Username@IP即可。
第一次登陆会提示:(如果没有提示这个则跳过这步)

询问你是否继续,我们要输入yes并回车。
然后输入密码。出现下图所示即为成功连接上了树莓派:

4、更新源地址
继续输入:
sudo vim /etc/apt/sources.list
把以下代码加入到文件里:(vim编辑模式在我的另一篇文章有详细说明,点这里,往下翻一翻就可以看到键位图了)
deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal main main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main restricted universe multiverse
# deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-proposed main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-proposed main restricted universe multiverse
5、更新
依次执行以下命令:(这步会很耗时间,耐心等待)
sudo apt-get update
sudo apt-get upgrade
6、安装桌面环境
依次执行以下命令:(这步比上面这步更耗时间… … 耐心等待… …)
sudo apt install ubuntu-desktop
sudo apt install xrdp
安装完后重启:
sudo reboot
7、允许root登陆
继续执行:
sudo passwd root
这时候会提示让你输入密码,建议设置为123456,方便记、方便输入,后面会经常输入密码。
sudo vim /usr/share/lightdm/lightdm.conf.d/50-ubuntu.conf
此时进入vim编辑界面,添加下列两行到该文件:
greeter-show-manual-login=true
allow-guest=false
编辑完后,重启树莓派:
sudo reboot
8、登陆远程桌面
可以使用 windows10 自带的远程桌面连接。直接搜索就行。也可以使用其他软件,如VNC软件:VNC Viewer。


下面仅展示 windows10 自带的远程桌面连接。
输入树莓派 IP 并连接:
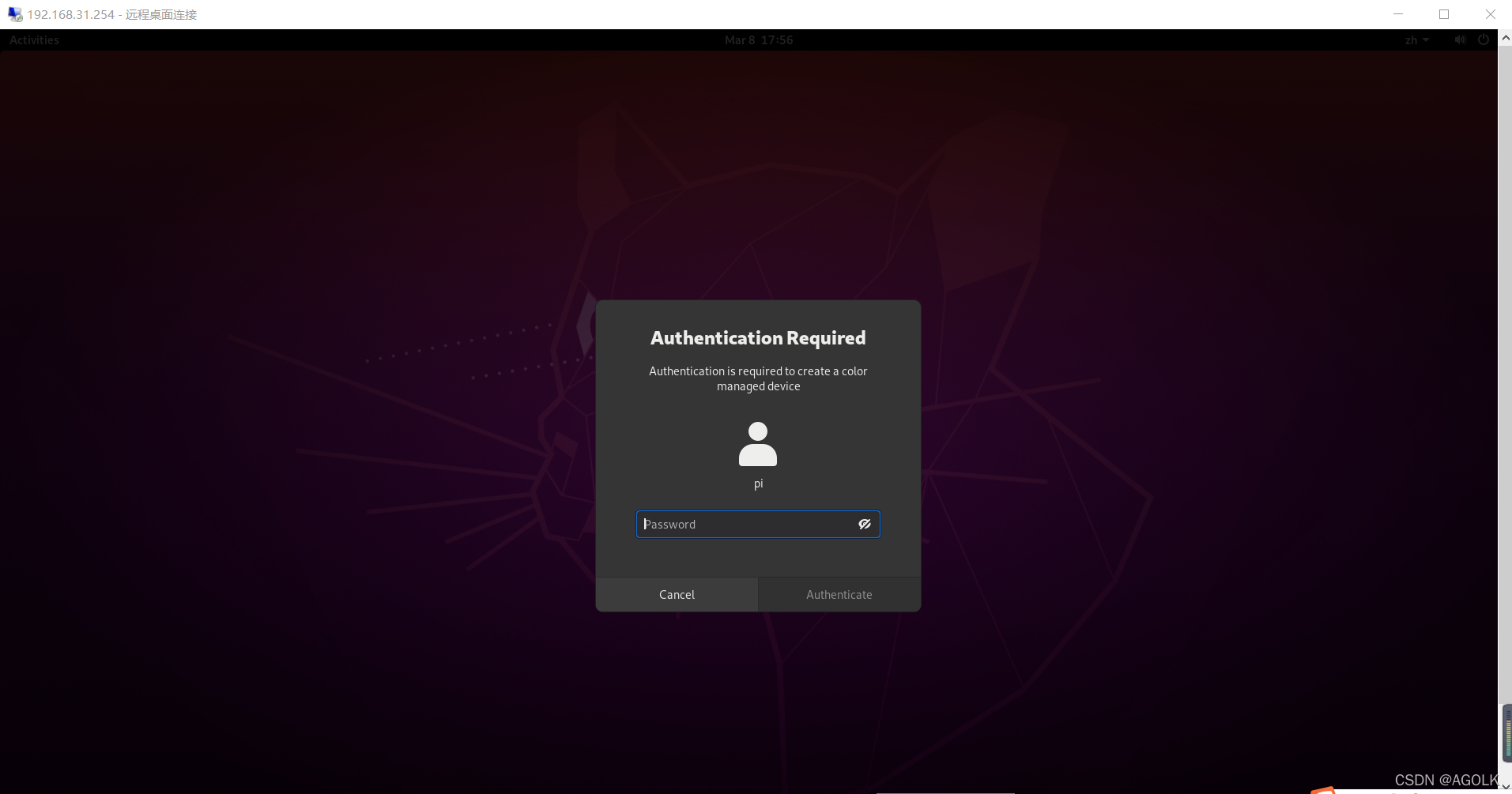
输入账号密码,点击OK:

稍等两分钟,成功看到桌面:(图中输入密码即可)
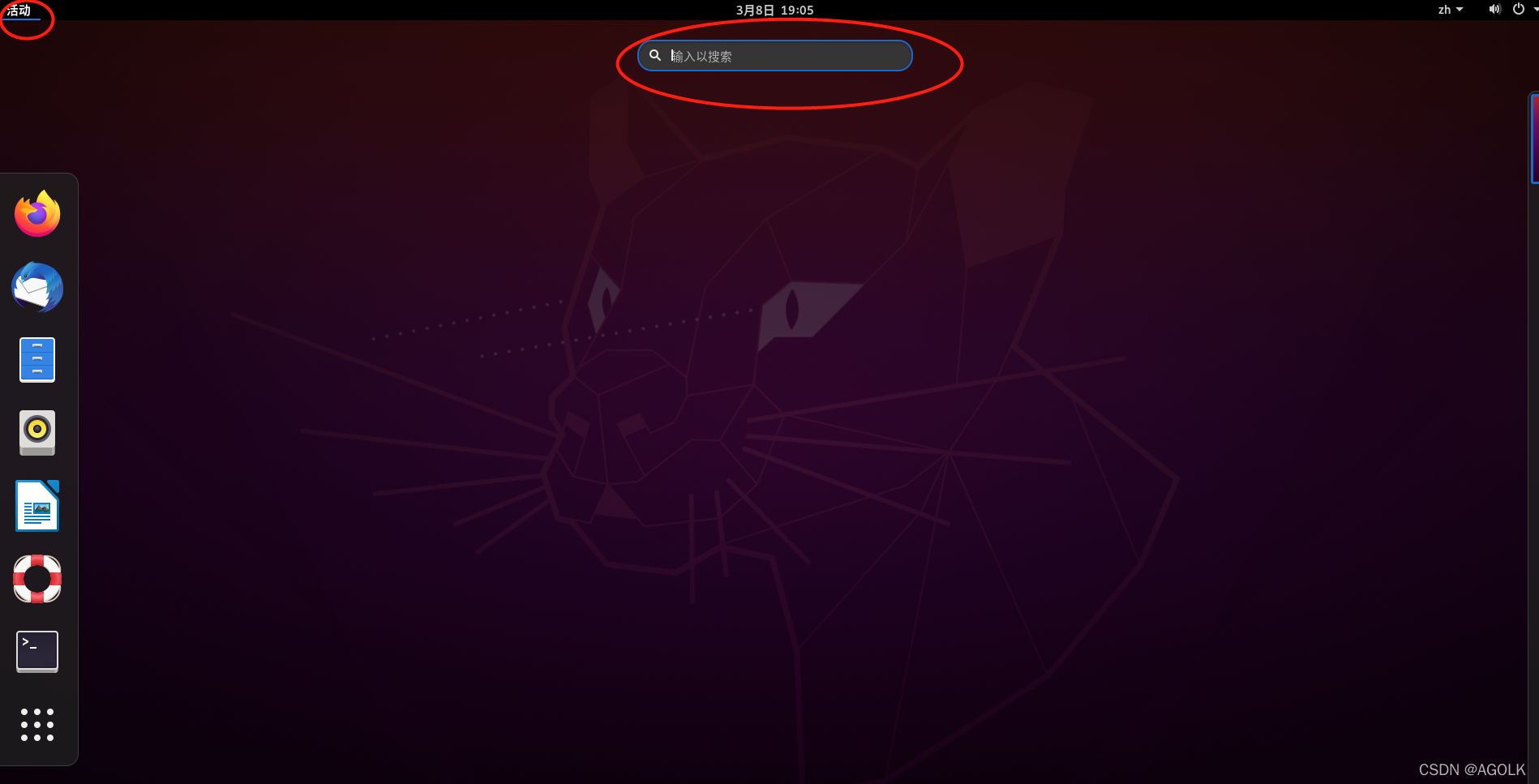
 菜单栏在左上角
菜单栏在左上角Activities处。
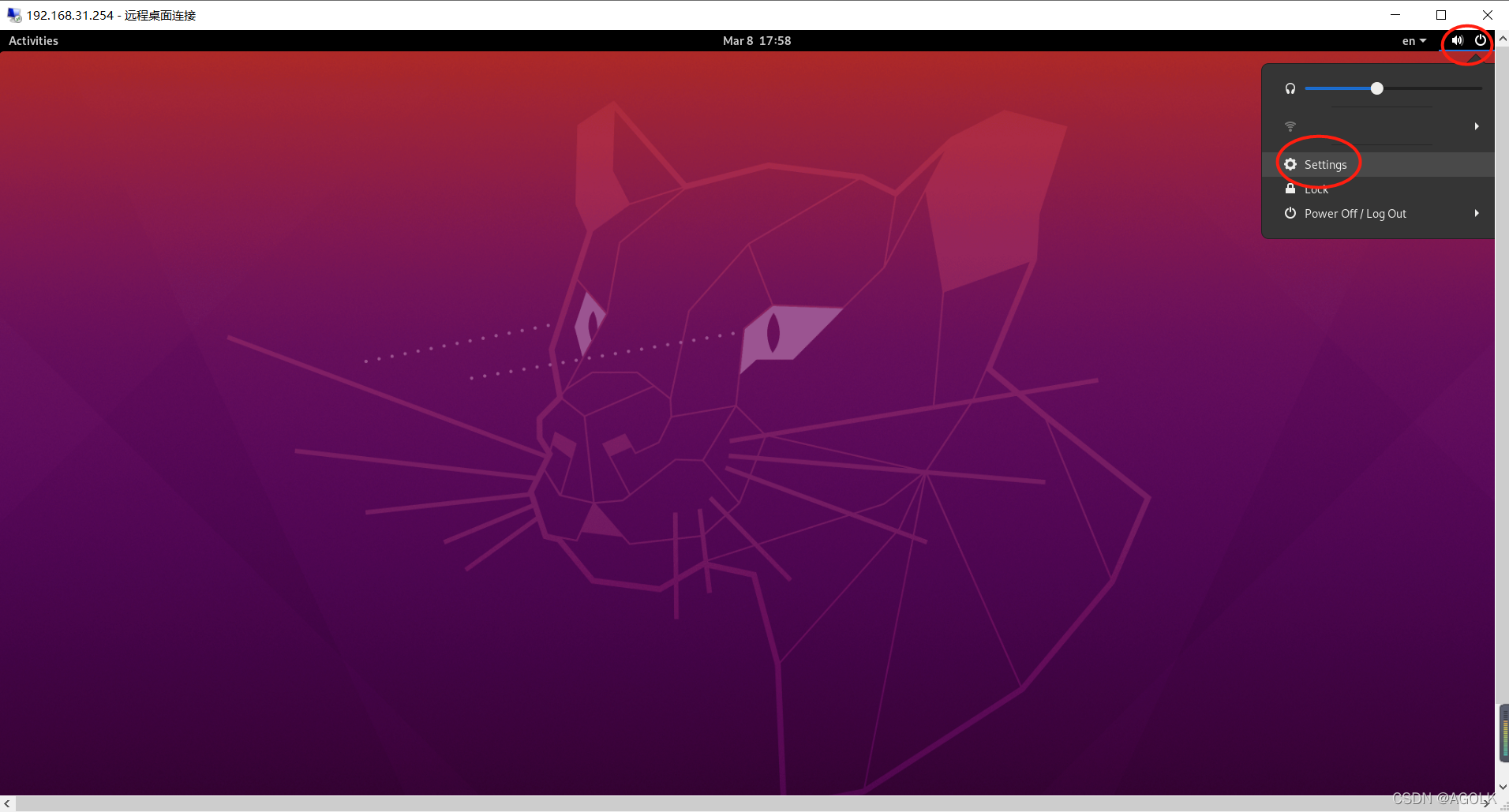
9、设置中文
点击右上角,进入设置:
按下图操作:(我这里已经过中文了,所以可能跟你们显示的不太一样)
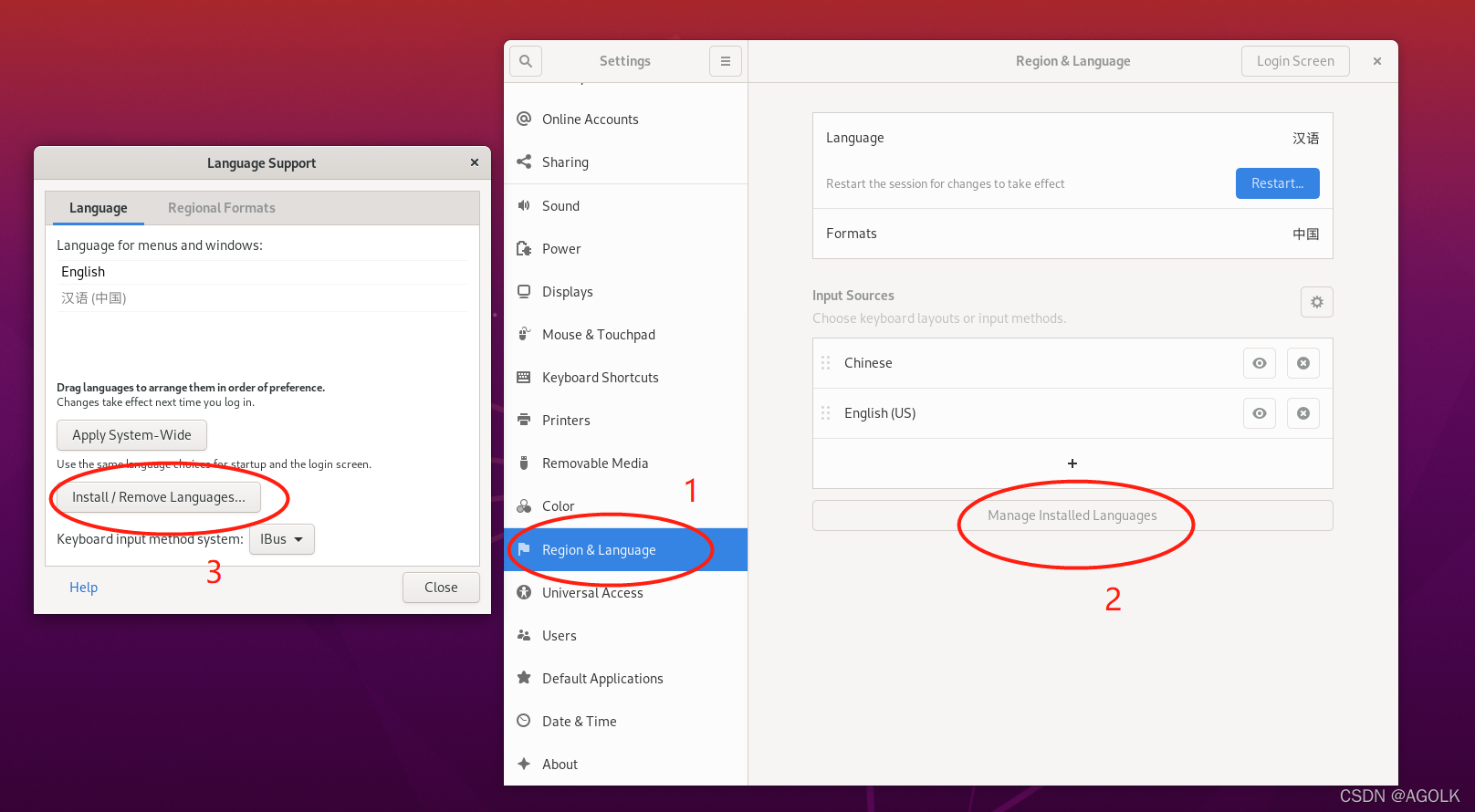
然后找到中文简体,安装即可:
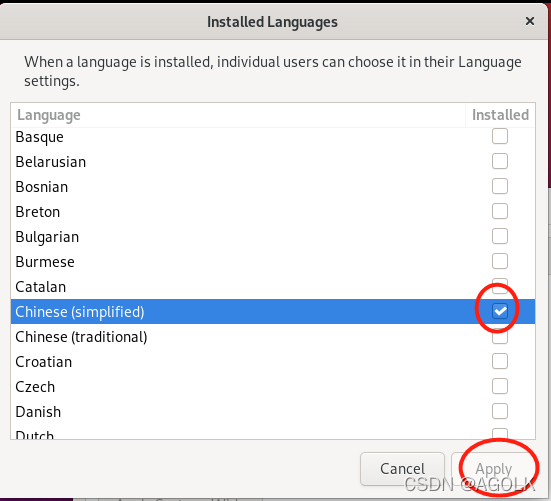
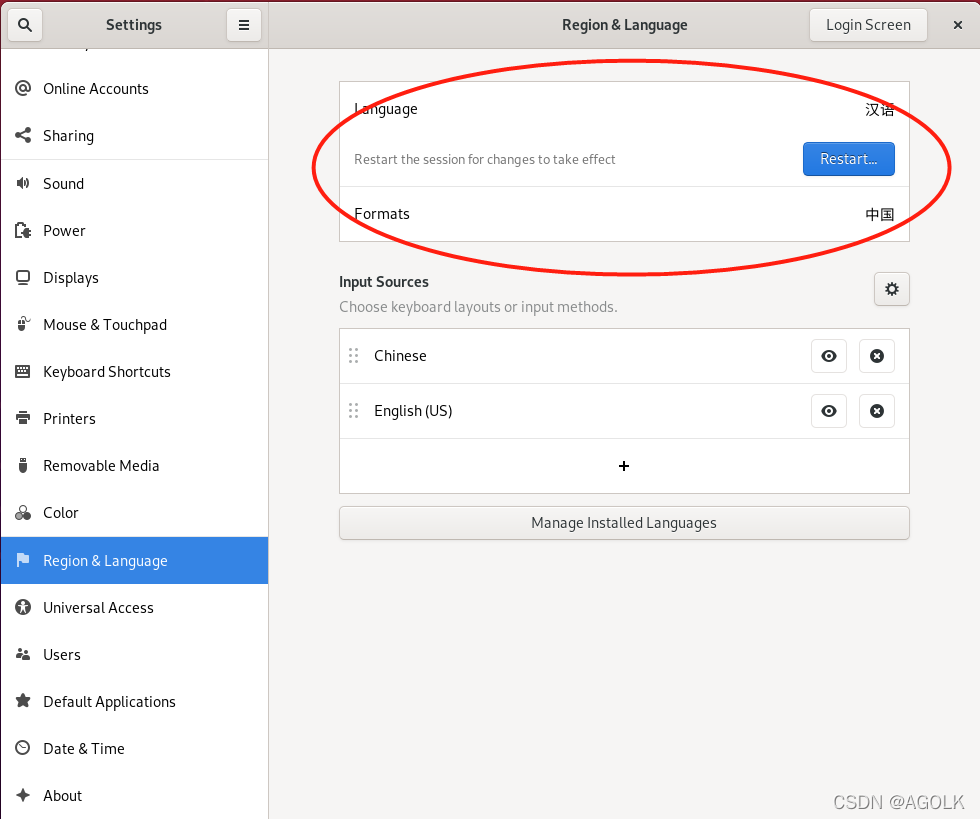
安装完成后,回到这个界面,language选择汉语,formats选择中国,然后点击Restart重启即可。
10、安装ROS
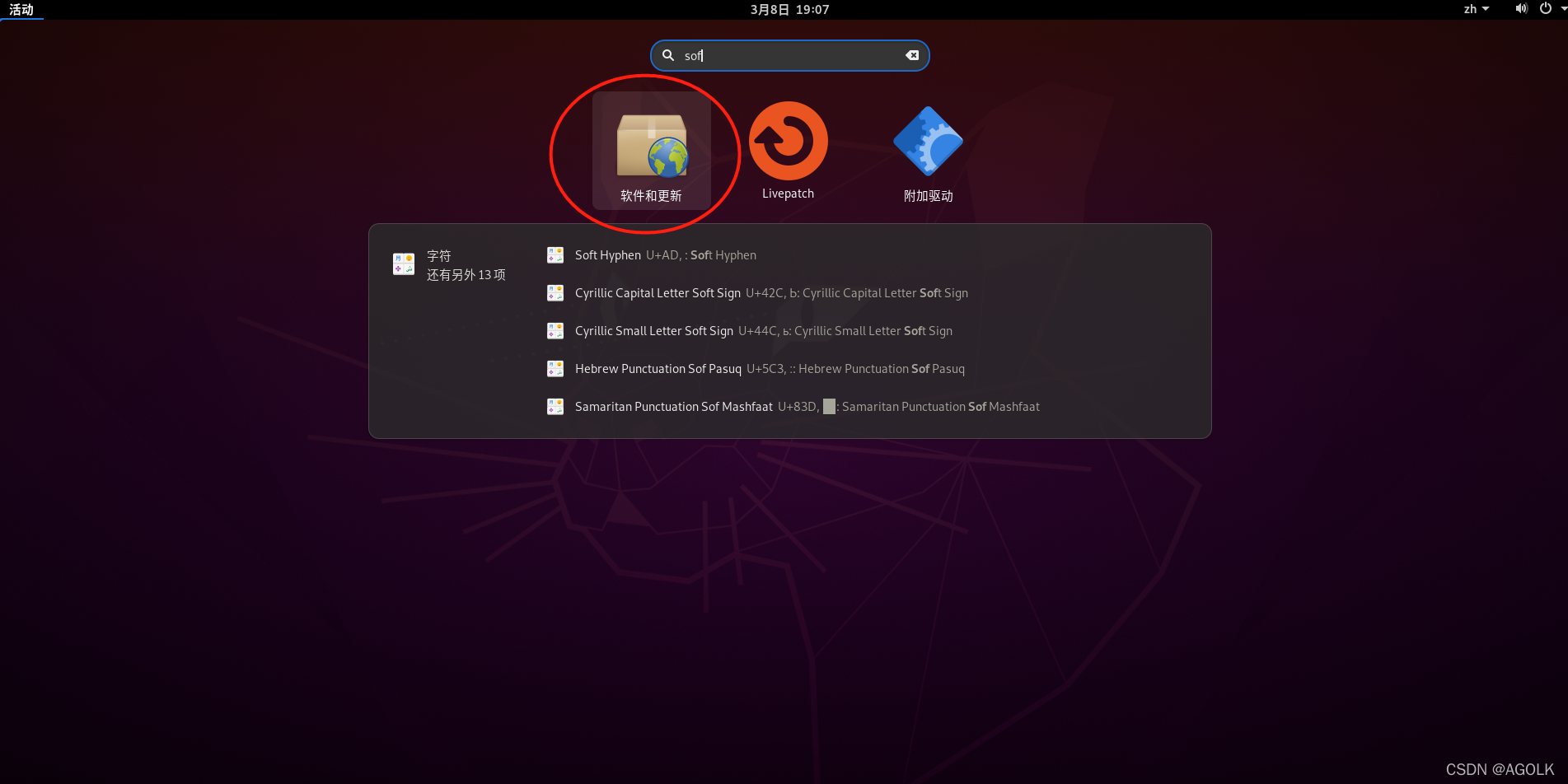
点击左上角活动,在搜索栏输入soft:
打开软件和更新:
确保勾选了"restricted", “universe” 和 “multiverse”:

ctrl+alt+T打开终端,输入以下代码以设置安装源:
官方安装源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
或 清华安装源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'

设置key:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新 apt (以前是 apt-get, 官方建议使用 apt 而非 apt-get),apt 是用于从互联网仓库搜索、安装、升级、卸载软件或操作系统的工具:
sudo apt update
等待… …
然后,再安装所需类型的 ROS。ROS 有多个类型:Desktop-Full(完整版)、Desktop (桌面版)、ROS-Base(基础版)。其次是ROS版本,ubuntu 20.04 建议安装 noetic 版本,ubuntu 18.04 建议安装 melodic 版本。如:
sudo apt install ros-noetic-desktop-full
等待半小时… …
11、配置环境变量
配置环境变量,方便在任意终端中使用 ROS。
依次输入以下语句:(其中的 noetic 应改为你安装的ROS版本)
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
12、构建软件包的依赖关系
到目前为止,已经安装了运行核心ROS软件包所需的软件。要创建和管理你自己的 ROS 工作区,还需要安装其他常用依赖:(如果不是 noetic 版本,就把代码中的所有的3去掉)
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
安装并初始化rosdep。在使用许多ROS工具之前,需要初始化rosdep。rosdep使您可以轻松地为要编译的源安装系统依赖:(如果不是 noetic 版本,就把代码中的3去掉)
sudo apt install python3-rosdep
依次输入以下命令,可以初始化rosdep:
sudo rosdep init
rosdep update
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)