状态空间法:
在经典控制理论中常用输入输出模型,用传递函数描述系统输入与输出之间的的关系,即系统外部的因果关系。是一种不完全描述。
所谓状态空间法是指:即描述了系统输入变量和内部变量之间的互相关系,也描述了输入变量、内部变量和输出变量间的因果关系。是一种完全描述。
状态空间的基本概念:
1.状态(state)
每一个时刻(t>t0),系统中的那些物理量(非物理量),以及他们的导数,都反映了系统的状态。
例如:RLC电路中:输入电压为u(t),在t>t0时,电容两端电压,电阻两端电压,电感两端电压。都反应系统的状态。
2.状态变量(state variable)
完全描述系统运动状态的最小个数的一组变量
tips:
- 完全描述是指一旦给定 初始状态 和 输入量 ,则系统在时域行为就完全确定
- 最小个数意味着这组变量之间相互独立
- 变量的个数通常等于系统储能元件的个数
3.状态向量(state vector)
将n个状态变量看成是一个向量即
x
(
t
)
=
(
x
1
(
t
)
x
2
(
t
)
…
x
n
(
t
)
)
\bm x(t)=\left(\begin{array}{c} x_1(t) \\ x_2(t) \\ \ldots\\ x_n(t) \\ \end{array}\right)
x(t)=⎝⎜⎜⎛x1(t)x2(t)…xn(t)⎠⎟⎟⎞
4.状态空间
以状态变量
x
1
(
t
)
,
x
2
(
t
)
,
…
,
x
n
(
t
)
x_1(t),x_2(t),\ldots,x_n(t)
x1(t),x2(t),…,xn(t)
为坐标轴构成n维空间,称之为状态空间。在某一时刻,状态向量即状态空间内一点。
5.状态轨迹
随时间推移,状态向量会在状态空间中绘出一条轨迹,称之为状态轨迹。
6.状态方程
前面提到,状态空间法是指
描述了系统输入变量和内部变量之间的互相关系
x
′
=
A
x
+
B
u
\bm x\prime=\bm A \bm x+\bm B\bm u
x′=Ax+Bu
有点类似于递推的关系,由上式就可以推出状态轨迹
A为系统矩阵
B为输入矩阵
u为输入向量
7.输出方程
后半句:也描述了输入变量、内部变量和输出变量间的因果关系是指。
y
=
C
x
+
D
u
\bm y=\bm C\bm x+\bm D\bm u
y=Cx+Du
C为输出矩阵
D为前馈矩阵
状态空间描述法
{
x
′
=
A
x
+
B
u
y
=
C
x
+
D
u
\left \{\begin{array}{c} \bm x\prime=\bm A \bm x+\bm B\bm u\\ \bm y=\bm C\bm x+\bm D\bm u \end{array}\right.
{x′=Ax+Buy=Cx+Du
tips:
- 对于ABCD来讲,若是线性连续定常系统,ABCD中的元素为常数;对于线性时变系统来讲,ABCD中的元素一部分为时间的函数
- 状态空间表达式非唯一。
- 输出变量于状态变量的区别,输出一定可测,状态变量不一定可测。
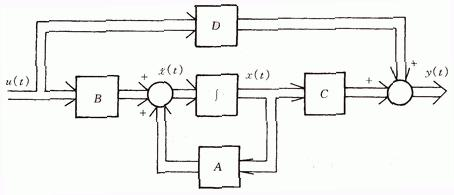
状态空间描述的模拟结构图:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)