01 阿里云RDS的架构与规格大图
下图从高可用类型、数据可靠性、资源复用率、规格大小、规格代码等角度,较为完整的概况了当前RDS主要的架构与规格:
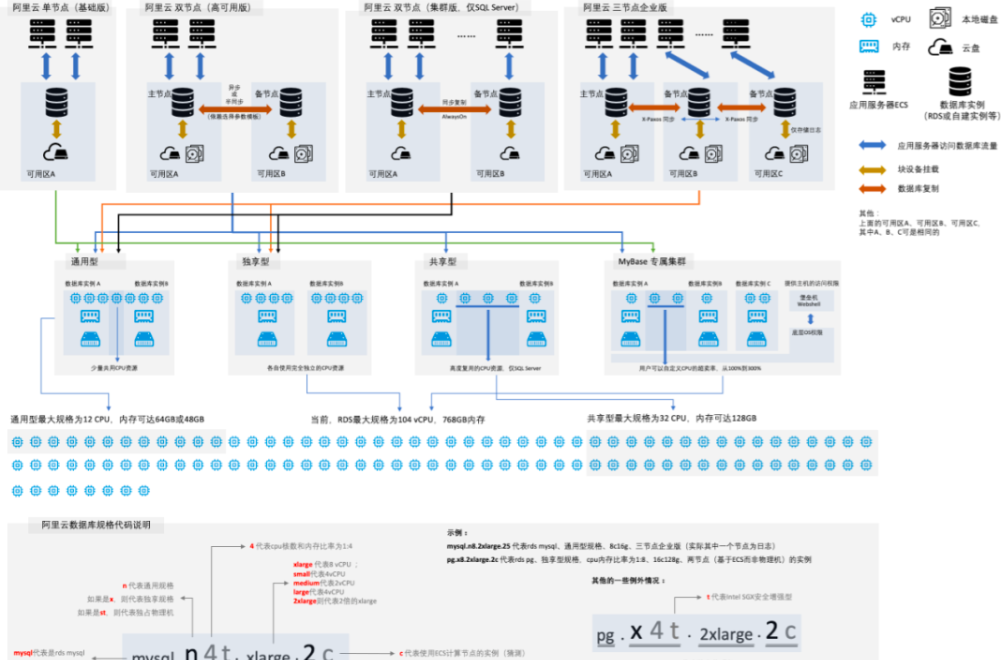
从高可用区架构上,分为单节点(基础版)、双节点(高可用版)以及三节点企业版、集群版(仅SQL Server AlwaysOn)。从资源共享与隔离上,则分为通用型、独享型、共享型和独占物理机(可以理解为是特殊的独享型)。从磁盘使用上的不同,则分为云盘版和本地盘版。
当前,RDS最大规格为104核CPU,768GB内存。其中通用型,最大为12核CPU;共享型最大为32核CPU。
02 主要的架构类型
数据库通常是企业业务架构中的核心组件,数据库的可用性与业务可用性直接相关。所以,高可用是云数据库架构选型第一个需要关注的内容。
从高可用角度,阿里云数据库提供了基础版(即单节点)、双节点高可用版、三节点企业版。不同的版本,则是在成本、可用性、数据可靠性之间的平衡:
- 单节点通过简单的架构,以最低的成本提供了基本可用的云数据库服务
- 双节点高可用版则是适合绝大多数业务场景的模式,两个节点分布于一个地区的两个可用区,故障时,切换速度较快,数据双副本,可靠性也比较高
- 三节点企业版,则通过X-Paxos实现底层数据一致,并以三副本(两份数据+一份日志)保障数据可靠性
2.1 基础版(即单节点版本)
阿里云基础版使用阿里云云盘作为数据库存储,挂载在数据库的计算节点上,实现了存储与计算的分离。这使得,计算节点出现故障的时候,重新使用一个新的计算节点,再重新挂载原来的数据库存储,即可启动数据库,恢复出现故障的数据库。所以,在计算节点发生故障的时候,RPO通常小于1分钟,RTO则为5分钟~一小时。当整个可用区发生故障的时候,RPO和RTO的值则依赖数据库备份的频率情况。
2.2 高可用版
两节点高可用是用户使用最多的版本,也是数据库最为常见的架构。数据库有主备两个节点组成,通过数据库层的逻辑日志进行复制。相比单节点,无论是在数据可靠性、服务的可用性都有非常大的提升。由于主备节点都在同一个大region,日志延迟通常都非常小,所以发生单节点故障时,高可用版的数据可靠性通常是比较高的。注意到,AWS对应的双节点版本的RPO是零,那么阿里云数据库怎样呢?
具体的,对阿里云RDS MySQL,阿里云的两节点高可用,根据所选择的参数模板分为如下三类:
- 高性能:sync_binlog=1000, innodb_flush_log_at_trx_commit=2, async
- 异步模式:sync_binlog=1, innodb_flush_log_at_trx_commit=1, async
- 默认:sync_binlog=1, innodb_flush_log_at_trx_commit=1, semi-sync
其中,“高性能”版本和“异步”版本,都是异步复制,在发生主节点故障时,因为复制为异步的,可能会有少部分的事务日志没有传到备节点,则可能会丢失少部分事务。也就是说,这两个版本为了实现更好的性能,在数据库的RPO上做了小的让步。“默认”版本,使用了半同步复制,通常,数据可靠性会更高。但因为半同步可能会有退化的场景,所以,该模式下数据复制还是在极端的情况下,还会有数据丢失的可能性。
那么,既然“异步”模式和“高性能”都有数据丢失的风险,他们的区别是什么什么呢?简单的概括,“异步”产生微小数据丢失的可能性更小。因为,主备节点通过设置sync_binlog=1, innodb_flush_log_at_trx_commit=1,可以最大可能性的保障,主节点的数据可靠性。
事实上,高可用版本是可以满足绝大多数业务场景的需要的,一方面同一个可用区内数据传输延迟非常小,日志传输通常都非常通畅,即便主节点发生故障,实际的情况中,通常不会出现日志延迟。另外,主节点失败后,通常可以通过重启等方式恢复,云厂商的硬件都有着较为标准的硬件过保淘汰的机制,硬件完全不可用的情况也并不多。另外,底层磁盘会通过硬RAID或者软RAID的方式,保障磁盘数据存储的可靠性,数据即便是在一台机器上,也会保存在两块盘上。
两节点高可用版本在某些特殊场景下,数据还是存在一些不可用风险,例如,当其中一个节点发生故障,而本地数据量又非常大时,需要重新在一台新的机器上搭建备节点时,因为数据量较大,重建时间通常会比较长,而这时候,主节点则会一直单节点运行,如果不幸主节点再出现故障,则会出现不可用或者数据丢失。如果,对数据的安全性有更高的要求,则可以考虑选择“三节点企业版”。
2.3 三节点企业版
当前仅RDS MySQL有该版本。三节点企业版使用了基于X-Paxos[^4]的一致性协议实现了数据的同步复制,适用于数据安全可靠性要求非常高的场景,例如金融交易数据等。三节点中,有一个节点仅存储日志,以此实现接近于两个节点的成本与价格,实现更高的数据安全与可靠性。
三节点企业版在创建的时候,可以选择分布在1~3个可用区。如果需要跨可用区的容灾,则可以让三个副本分布于三个可用区,如果需要更高的性能,则可以让三个副本都在同一个可用区。
2.4 关于MySQL的参数sync_binlog, innodb_flush_log_at_trx_commit
在阿里云RDS的高可用参数模板选择中,不同的参数模板,最主要的区别就是这两个参数的不同配置。这是MySQL和InnoDB在数据安全性上最重要的两个参数。双1设置(sync_binlog=1, innodb_flush_log_at_trx_commit=1)是数据安全性最高的配置。
数据库是日志先行(WAL)的系统,通过事务日志的持久化存储来保障数据的持久化。在一般的Linux系统中,数据写入磁盘的持久化需要通过系统调用fsync来完成,相对于内存操作,fsync需要将数据写入磁盘,这是一个非常“耗时”的操作。而上面这两个参数就是控制MySQL的二进制日志和InnoDB的日志何时调用fsync完成数据的持久化。所以,这两个参数的配置很大程度上反应了MySQL在性能与安全性方面的平衡。
其中,sync_binlog代表了,MySQL层的日志(即二进制日志)的刷写磁盘的频率,如果设置成1,则代表每个二进制日志写入文件后,都会进行强制刷盘。如果设置成0,则代表MySQL自己不会强制要求操作系统将缓存刷入磁盘,而由操作系统自己来控制这个行为。如果设置成其他的数字N,则代表完成N个二进制日志写入后,则进行一次刷写数据的系统调用。
innodb_flush_log_at_trx_commit则控制了InnoDB的日志刷写磁盘的频率。取值可以是0,1,2。
- 其中1最严格,代表每个事务完成后都会刷写到磁盘中。
- 如果该参数设置成0,那么在事务完成后,InnoDB并不会立刻调用文件系统写入操作也不会调用磁盘刷写操作,而是每隔1秒才调用一次文件系统写入操作和磁盘刷写操作。那么,在操作系统崩溃的情况下,可能会丢失1秒的事务。
- 如果该参数设置成2,那么,每次InnoDB事务完成的时候,都会通过系统调用write将数据写入文件(这时候可能只是写入到了文件系统的缓存,而不是磁盘),但是每隔1秒才会进行一次刷写到磁盘的操作。那么,在操作系统崩溃的情况下,可能会丢失1秒的事务。相比设置成0,该设置会让InnoDB更加频繁的调用文件系统写入操作,数据的安全性要比设置成0高一些。
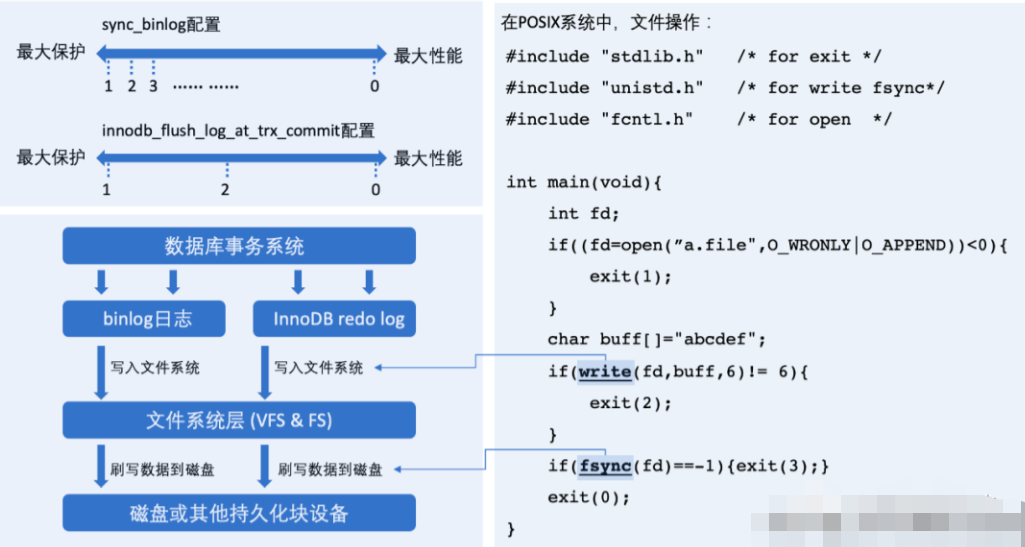
我们可以通过下图来理解这两个参数的含义,以及在操作系统中对应的“写入文件系统”与“刷写数据到磁盘”的含义。首先,在数据库的事务处理过程中,会产生binlog日志和InnoDB的redo日志,这两个日志分别在MySQL Server层面和InnoDB引擎层面保障了事务的持久性。在事务提交的时候,数据库会先将数据“写入文件系统”,通常文件系统会先将数据写入文件缓存中,该缓存是在内存中,这样就意味着,如果发生操作系统级别的宕机,那么写入的日志就会丢失。为了避免这种数据丢失,数据库接着会通过系统调用,“刷写数据到磁盘”中。此时,即可以认为数据已经持久化到磁盘中。
这时,再回头看看阿里云RDS的参数模板。在高性能模板中,”sync_binlog=1000, innodb_flush_log_at_trx_commit=2, async”,代表了在写入1000个binlog日志后再进行刷写数据到磁盘的操作,InnoDB的日志则都会先写入文件系统,然后每隔一秒进行一次刷写数据到磁盘。在“默认模式下,“默认:sync_binlog=1, innodb_flush_log_at_trx_commit=1, semi-sync”,则是最严格的日志模式,也就是会保障每个事务日志安全的刷写到磁盘。
日志的刷写模式对性能有非常大的影响。如果不去关注这些参数,就直接去测试不同云厂商的性能,则会发现,云厂商之间的RDS有着非常大的性能差异。通常,这些差异并不是厂商之前的技术能力导致的,更多的是由于他们在对于安全性和性能的平衡时,选择的不同的平衡点。
03资源复用与规格
从资源共享与隔离上,RDS又分为:通用型、独享型和共享型。具体的:
- “通用型”适合一般的业务使用场景,但有一定的CPU共享率,也就说是,有一定的概率实例的资源可能会被其他实例争抢而导致性能的波动 。
- “独享型”则使用完全独享的CPU的资源和内存资源,不会共享其他人的资源,自己的资源也不会被其他人共享,所以,有更稳定的性能。
- “共享型”则与通用型类似CPU资源会被共享,并且共享率更高,所以性价比更高,同时受到资源争抢的影响的可能性也更大,当前仅SQL Server支持。
除了,上述主要规格类型之外,阿里云还提供了“独占物理机”规格,选择该规格的用户可以完全的独占一台物理机的资源:

04数据库专属集群MyBase
专属集群MyBase是阿里云推出的一种特殊的形态。可以理解为,是一种全托管RDS与自建数据库的中间形态。在全托管的RDS基础上,提供了两个重大的能力:
- 允许用户登录数据库所在的主机
- 允许用户配置数据库实例CPU的“超配比”
当然,要求是用户一次购买一个非常大的、可以容纳多个RDS实例的“大集群”,专属集群则提供了以上两个能力,以及RDS其他的基本能力,包括安装配置、监控管理、备份恢复等一系列生命周期管理能力。
使用这种规格,用户具备更大的自由度。一方面可以登录主机,观测主机与数据库的状态,或者将自己原有的监控体系部署到专属集群中。另一方面,用户可以根据自己的业务特点,控制集群内的CPU资源的超配比。对于核心的应用,则使用资源完全不超配的集群;对于响应时间没有那么敏感的应用,例如开发测试环境,则可以配置高达300%的CPU超配比,以此大大降低数据库的成本。
05关于本地盘与云盘版
阿里云的主要版本都会支持本地SSD和高性能云盘。他们的差异在于计算节点与磁盘存储是否在同一台物理机器上,对于使用高性能云盘的规格,通常是通过挂载一个同地区的网络块设备作为存储。
对于阿里云厂商来说,未来主推的将是云盘版。原因是云盘相对于本地盘来说,有很多的优势:
- 统一使用云盘版,让云厂商的供应链管理变得简单。如果使用本地盘版本,意味着数据库机型定制性会增强,供应链的困难会增加产品的成本,最终影响价格。另外,简单的供应链也会让产品的部署更加标准化,更加敏捷地实现多环境多区域的部署。
- 使用云盘版,也可以理解为是“存储计算分离”的架构,那么如果计算节点故障,则可以快速通过使用一台新的计算节点并挂载云盘,而实现高可用。这种方式有着非常好的通用性,无论是哪种数据库都可以使用,而无需考虑数据库种类之间的差异。无论是MySQL还是PostgreSQL、Oracle都可以使用这种方式实现高可用。
- 云盘版本身提供了一定的高可用与高可靠能力。云盘本身数据可以通过RAID或者EC算法实现数据的冗余与高可用,并且可以将数据分片到不同的磁盘与机器上,整体的吞吐会更高。
- 云盘版本身是分布式的,可以提供更高的吞吐,通常还可以提供更大的存储空间。例如,各个云厂商的云盘存储都可以提供12TB或32TB的存储空间,基本上可以满足各类业务需要。
当然,使用云盘也有一些缺点,例如,相比本地盘,云盘的访问延迟更大,需要通过网络访问,而对于数据库这类IO极其敏感的应用,本地磁盘的IO性能的稳定性通常会更强一些
06关于通用型与独享型的性能
独享型规格的资源完全由用户独立使用,价格通常更贵。而通用型则因为部分资源的共享,会导致性能在某些不可预期的情况下发生一些不可预期的波动。而独享型规格也更贵,更多的企业级场景,也会推荐使用独享型,会有很多人会认为独享型的性能也更高。而实际上,如果做过实际测试就会发现,一般来说,相同的规格,通用型的性能与吞吐通常都会更高。
所以,实际情况是,通用型的价格更加便宜,性能也会更好。缺点在于,可能会出现一些不可预期的性能波动,而因为大多数数据库应用都是IO密集型的,所以,实际场景中,这种不可预期的波动并不是非常多。
所以,这两个版本的选择,需要用户根据自己的实际情况去选择。如果,可以接受偶尔的性能波动,则一定是建议选择通用型的;如果应用对数据库的响应时间极其敏感,则应该选择独享型。另外,当前,通用型最大规格仅支持12核CPU,所以对于压力非常大系统,则只能选择独享型。
07关于超配比
对于在线数据库应用来说,通常是IO或者吞吐密集型的。CPU资源在很多时候,会有一定的冗余。对于云厂商来说,则可以通过超配CPU的售卖率来降低成本,同时也降低数据库资源的价格,这就是通用型背后重要的逻辑。
而一般来说,可以超配的通常只有CPU资源。磁盘资源虽然可以超配,但是实际使用中,是不能重合的,当用户的磁盘占用增到购买值的时候,资源则不可以共享,这与CPU的超配并不相同。内存资源则更加是独享的,Buffer Pool的通常是满的,无论这些内存页是否被实际使用,数据库总是会尽力在内存中存储尽可能多的数据。
MyBase提供的一个重要配置项,就是可以用户自定义底层资源的超配比,该比率取值从100%~300%。也就是说,一个32核CPU的资源,最多可以分配给12个8核CPU的实例使用,看起来是96=12*8个CPU被使用,即实现了300%的超配比。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)