rcS是nuttx系统启动后,执行的脚本,主要实现对飞控外设以及核心算法模块的启动。
先贴一张图,这个图已经大致写出了rcS的流程。
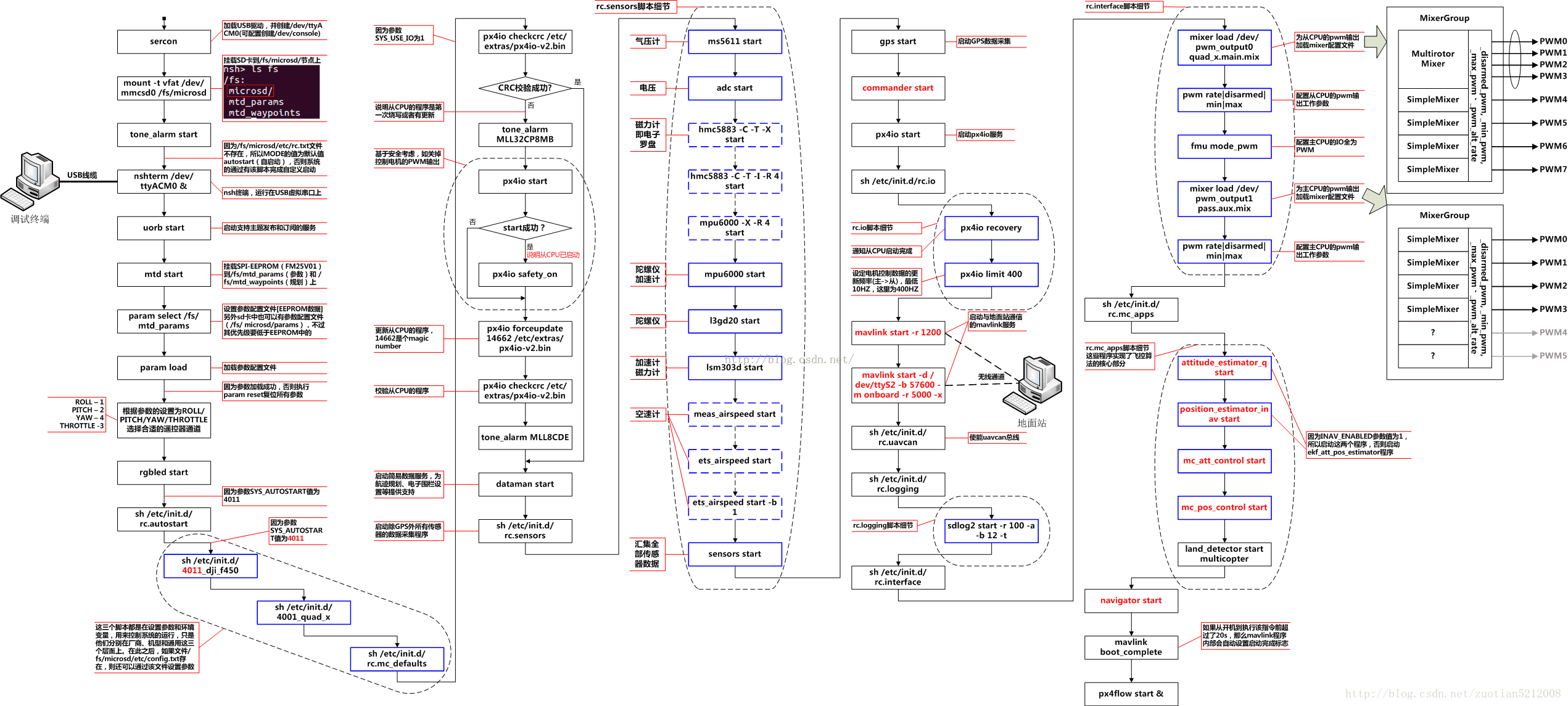
给出代码分析。有些地方没有分析到,还望指正。
1.rcS文件
#!nsh
sercon
set MODE autostart
set TUNE_ERR ML<<CP4CP4CP4CP4CP4
set LOG_FILE /fs/microsd/bootlog.txt
if mount -t vfat /dev/mmcsd0 /fs/microsd
then
tone_alarm start
else
tone_alarm MBAGP
if mkfatfs /dev/mmcsd0
then
if mount -t vfat /dev/mmcsd0 /fs/microsd
then
echo "INFO [init] MicroSD card formatted"
else
echo "ERROR [init] Format failed"
tone_alarm MNBG
set LOG_FILE /dev/null
fi
else
set LOG_FILE /dev/null
fi
fi
set FRC /fs/microsd/etc/rc.txt
if [ -f $FRC ]
then
echo "INFO [init] Executing script: $FRC"
sh $FRC
set MODE custom
fi
unset FRC
if [ $MODE == autostart ]
then
uorb start
set PARAM_FILE /fs/microsd/params
if mtd start
then
set PARAM_FILE /fs/mtd_params
fi
param select $PARAM_FILE
if param load
then
else
if param reset
then
fi
fi
if rgbled start
then
else
if blinkm start
then
blinkm systemstate
fi
fi
if param compare SYS_AUTOCONFIG 1
then
param reset_nostart RC*
set AUTOCNF yes
else
set AUTOCNF no
if param compare BAT_N_CELLS 0
then
param set BAT_N_CELLS 3
fi
fi
set HIL no
set VEHICLE_TYPE none
set MIXER none
set MIXER_AUX none
set OUTPUT_MODE none
set PWM_OUT none
set PWM_RATE none
set PWM_DISARMED none
set PWM_MIN none
set PWM_MAX none
set PWM_AUX_OUT none
set PWM_AUX_RATE none
set PWM_ACHDIS none
set PWM_AUX_DISARMED none
set PWM_AUX_MIN none
set PWM_AUX_MAX none
set FAILSAFE_AUX none
set MK_MODE none
set FMU_MODE pwm
set AUX_MODE pwm
set MAVLINK_F default
set MAVLINK_COMPANION_DEVICE /dev/ttyS2
set EXIT_ON_END no
set MAV_TYPE none
set FAILSAFE none
set USE_IO yes
if param compare SYS_USE_IO 1
then
if ver hwcmp PX4FMU_V4
then
set USE_IO no
fi
if ver hwcmp MINDPX_V2
then
set USE_IO no
fi
if ver hwcmp CRAZYFLIE
then
set USE_IO no
if param compare SYS_AUTOSTART 0
then
param set SYS_AUTOSTART 4900
set AUTOCNF yes
fi
fi
if ver hwcmp AEROFC_V1
then
set USE_IO no
fi
else
set USE_IO no
fi
if ver hwcmp AEROFC_V1
then
if param compare SYS_AUTOSTART 0
then
set AUTOCNF yes
fi
param set SYS_AUTOSTART 4070
fi
if param compare SYS_AUTOSTART 0
then
else
sh /etc/init.d/rc.autostart
fi
unset MODE
if ver hwcmp PX4FMU_V4
then
set MIXER_AUX none
fi
if ver hwcmp AEROFC_V1
then
set MIXER_AUX none
fi
set FCONFIG /fs/microsd/etc/config.txt
if [ -f $FCONFIG ]
then
echo "Custom: $FCONFIG"
sh $FCONFIG
fi
unset FCONFIG
if [ $AUTOCNF == yes ]
then
param set SYS_AUTOCONFIG 0
fi
unset AUTOCNF
set IO_PRESENT no
if [ $USE_IO == yes ]
then
if [ -f /etc/extras/px4io-v2.bin ]
then
set IO_FILE /etc/extras/px4io-v2.bin
else
set IO_FILE /etc/extras/px4io-v1.bin
fi
if px4io checkcrc ${IO_FILE}
then
echo "[init] PX4IO CRC OK" >> $LOG_FILE
set IO_PRESENT yes
else
tone_alarm MLL32CP8MB
if px4io start
then
if px4io safety_on
then
else
px4io stop
fi
fi
if px4io forceupdate 14662 ${IO_FILE}
then
usleep 500000
if px4io checkcrc $IO_FILE
then
echo "PX4IO CRC OK after updating" >> $LOG_FILE
tone_alarm MLL8CDE
set IO_PRESENT yes
else
echo "PX4IO update failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
else
echo "PX4IO update failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
unset IO_FILE
if [ $IO_PRESENT == no ]
then
echo "PX4IO not found" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
if [ $OUTPUT_MODE == none ]
then
if [ $USE_IO == yes ]
then
set OUTPUT_MODE io 设置OUTPUT_MODE为 io
else
set OUTPUT_MODE fmu
fi
fi
if [ $OUTPUT_MODE == io -a $IO_PRESENT != yes ]
then
set OUTPUT_MODE none
if ver hwcmp PX4FMU_V1
then
set FMU_MODE serial
fi
fi
if [ $OUTPUT_MODE == ardrone ]
then
set FMU_MODE gpio_serial
fi
if [ $OUTPUT_MODE == tap_esc ]
then
set FMU_MODE rcin
fi
if [ $HIL == yes ]
then
set OUTPUT_MODE hil
if ver hwcmp PX4FMU_V1
then
set FMU_MODE serial
fi
unset HIL
else
unset HIL
gps start
fi
if dataman start
then
fi
sh /etc/init.d/rc.sensors
if [ $OUTPUT_MODE == hil ]
then
commander start -hil
else
commander start
fi
load_mon start
set TTYS1_BUSY no
if param greater UAVCAN_ENABLE 2
then
set OUTPUT_MODE uavcan_esc
fi
if param compare SENS_EN_LL40LS 1
then
set FMU_MODE pwm4
set AUX_MODE pwm4
fi
if param greater TRIG_MODE 0
then
set FMU_MODE pwm4
set AUX_MODE pwm4
camera_trigger start
fi
if [ $OUTPUT_MODE != none ]
then
if [ $OUTPUT_MODE == uavcan_esc ]
then
if param compare UAVCAN_ENABLE 0
then
echo "OVERRIDING UAVCAN_ENABLE = 3" >> $LOG_FILE
param set UAVCAN_ENABLE 3
fi
fi
if [ $OUTPUT_MODE == io -o $OUTPUT_MODE == uavcan_esc ]
then
if px4io start
then
sh /etc/init.d/rc.io
else
echo "PX4IO start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
if [ $OUTPUT_MODE == fmu -o $OUTPUT_MODE == ardrone ]
then
if fmu mode_$FMU_MODE
then
else
echo "FMU start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
if ver hwcmp PX4FMU_V1
then
if [ $FMU_MODE == pwm -o $FMU_MODE == gpio ]
then
set TTYS1_BUSY yes
fi
if [ $FMU_MODE == pwm_gpio -o $OUTPUT_MODE == ardrone ]
then
set TTYS1_BUSY yes
fi
fi
fi
if [ $OUTPUT_MODE == mkblctrl ]
then
set MKBLCTRL_ARG ""
if [ $MKBLCTRL_MODE == x ]
then
set MKBLCTRL_ARG "-mkmode x"
fi
if [ $MKBLCTRL_MODE == + ]
then
set MKBLCTRL_ARG "-mkmode +"
fi
if mkblctrl $MKBLCTRL_ARG
then
else
echo "MK start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
unset MKBLCTRL_ARG
fi
unset MK_MODE
if [ $OUTPUT_MODE == hil ]
then
if pwm_out_sim mode_pwm16
then
else
tone_alarm $TUNE_ERR
fi
fi
if [ $IO_PRESENT == yes ]
then
if [ $OUTPUT_MODE != io ]
then
if px4io start
then
sh /etc/init.d/rc.io
else
echo "PX4IO start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
else
if [ $OUTPUT_MODE != fmu -a $OUTPUT_MODE != ardrone ]
then
if fmu mode_$FMU_MODE
then
else
echo "FMU mode_$FMU_MODE start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
if ver hwcmp PX4FMU_V1
then
if [ $FMU_MODE == pwm -o $FMU_MODE == gpio ]
then
set TTYS1_BUSY yes
fi
if [ $FMU_MODE == pwm_gpio -o $OUTPUT_MODE == ardrone ]
then
set TTYS1_BUSY yes
fi
fi
fi
fi
fi
if [ $MAVLINK_F == default ]
then
if [ $TTYS1_BUSY == yes ]
then
set MAVLINK_F "-r 1200 -d /dev/ttyS0"
set EXIT_ON_END yes
else
set MAVLINK_F "-r 1200"
if ver hwcmp PX4FMU_V4
then
set MAVLINK_F "-r 1200 -d /dev/ttyS1"
mavlink start -r 20000 -m config -b 921600 -d /dev/ttyS0
fi
if ver hwcmp AEROFC_V1
then
set MAVLINK_F "-r 1200 -d /dev/ttyS4"
fi
fi
if ver hwcmp CRAZYFLIE
then
set MAVLINK_F none
fi
fi
if [ "x$MAVLINK_F" == xnone ]
then
else
mavlink start $MAVLINK_F
fi
unset MAVLINK_F
if ver hwcmp PX4FMU_V1
then
else
if param compare SYS_COMPANION 10
then
frsky_telemetry start -d $MAVLINK_COMPANION_DEVICE
fi
if param compare SYS_COMPANION 20
then
syslink start
mavlink start -d /dev/bridge0 -b 57600 -m osd -r 40000
fi
if param compare SYS_COMPANION 921600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 921600 -m onboard -r 80000 -x
fi
if param compare SYS_COMPANION 57600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 57600 -m onboard -r 5000 -x
fi
if param compare SYS_COMPANION 157600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 57600 -m osd -r 1000
fi
if param compare SYS_COMPANION 257600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 57600 -m magic -r 5000 -x
fi
if param compare SYS_COMPANION 319200
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 19200 -r 1000
fi
if param compare SYS_COMPANION 338400
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 38400 -r 1000
fi
if param compare SYS_COMPANION 357600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 57600 -r 1000
fi
if param compare SYS_COMPANION 1921600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 921600 -r 20000
fi
if param compare SYS_COMPANION 1500000
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 1500000 -m onboard -r 100000 -x
fi
fi
unset MAVLINK_COMPANION_DEVICE
if param greater UAVCAN_ENABLE 0
then
if uavcan start fw
then
else
tone_alarm $TUNE_ERR
fi
fi
if param compare SENS_EN_LL40LS 1
then
if pwm_input start
then
if ll40ls start pwm
then
fi
fi
fi
if param compare SENS_EN_SF0X 0
then
else
sf0x start
fi
if param compare SENS_EN_SF1XX 0
then
else
sf1xx start
fi
if param compare SENS_EN_MB12XX 1
then
mb12xx start
fi
if param compare SENS_EN_TRONE 1
then
trone start
fi
if ver hwcmp PX4FMU_V4
then
frsky_telemetry start -d /dev/ttyS6
fi
if ver hwcmp MINDPX_V2
then
frsky_telemetry start -d /dev/ttyS6
fi
if ver hwcmp PX4FMU_V2
then
px4flow start &
fi
if ver hwcmp PX4FMU_V4
then
px4flow start &
fi
if ver hwcmp MINDPX_V2
then
px4flow start &
fi
mavlink start -r 800000 -d /dev/ttyACM0 -m config -x
if ver hwcmp PX4FMU_V1
then
if sdlog2 start -r 30 -a -b 2 -t
then
fi
else
if param compare SYS_LOGGER 0
then
if param greater EKF2_REC_RPL 0
then
if sdlog2 start -r 500 -e -b 18 -t
then
fi
else
if sdlog2 start -r 100 -a -b 9 -t
then
fi
fi
else
set LOGGER_ARGS ""
if param compare SDLOG_MODE 1
then
set LOGGER_ARGS "-e"
fi
if param compare SDLOG_MODE 2
then
set LOGGER_ARGS "-f"
fi
if logger start -b 12 -t $LOGGER_ARGS
then
fi
unset LOGGER_ARGS
fi
fi
if [ $OUTPUT_MODE == ardrone ]
then
ardrone_interface start -d /dev/ttyS1
fi
if [ $VEHICLE_TYPE == fw ]
then
if [ $MIXER == none ]
then
set MIXER AERT
fi
if [ $MAV_TYPE == none ]
then
set MAV_TYPE 1
fi
param set MAV_TYPE $MAV_TYPE
sh /etc/init.d/rc.interface
sh /etc/init.d/rc.fw_apps
fi
if [ $VEHICLE_TYPE == mc ]
then
if [ $MIXER == none ]
then
echo "Mixer undefined"
fi
if [ $MAV_TYPE == none ]
then
if [ $MIXER == quad_x -o $MIXER == quad_+ ]
then
set MAV_TYPE 2
fi
if [ $MIXER == quad_w -o $MIXER == sk450_deadcat ]
then
set MAV_TYPE 2
fi
if [ $MIXER == quad_h ]
then
set MAV_TYPE 2
fi
if [ $MIXER == tri_y_yaw- -o $MIXER == tri_y_yaw+ ]
then
set MAV_TYPE 15
fi
if [ $MIXER == hexa_x -o $MIXER == hexa_+ ]
then
set MAV_TYPE 13
fi
if [ $MIXER == hexa_cox ]
then
set MAV_TYPE 13
fi
if [ $MIXER == octo_x -o $MIXER == octo_+ ]
then
set MAV_TYPE 14
fi
if [ $MIXER == octo_cox -o $MIXER == octo_cox_w ]
then
set MAV_TYPE 14
fi
if [ $MIXER == coax ]
then
set MAV_TYPE 3
fi
fi
if [ $MAV_TYPE == none ]
then
echo "Unknown MAV_TYPE"
param set MAV_TYPE 2
else
param set MAV_TYPE $MAV_TYPE
fi
sh /etc/init.d/rc.interface
sh /etc/init.d/rc.mc_apps
fi
if [ $VEHICLE_TYPE == vtol ]
then
if [ $MIXER == none ]
then
echo "VTOL mixer undefined"
fi
if [ $MAV_TYPE == none ]
then
if [ $MIXER == caipirinha_vtol ]
then
set MAV_TYPE 19
fi
if [ $MIXER == firefly6 ]
then
set MAV_TYPE 21
fi
if [ $MIXER == quad_x_pusher_vtol ]
then
set MAV_TYPE 22
fi
fi
if [ $MAV_TYPE == none ]
then
echo "Unknown MAV_TYPE"
param set MAV_TYPE 19
else
param set MAV_TYPE $MAV_TYPE
fi
sh /etc/init.d/rc.interface
sh /etc/init.d/rc.vtol_apps
fi
if [ $VEHICLE_TYPE == rover ]
then
set MAV_TYPE 10
sh /etc/init.d/rc.interface
sh /etc/init.d/rc.axialracing_ax10_apps
param set MAV_TYPE 10
fi
if [ $VEHICLE_TYPE == passthrough ]
then
mavlink stop-all
commander stop
if mc_att_control stop
then
fi
if ver hwcmp PX4FMU_V2
then
snapdragon_rc_pwm start -d /dev/ttyS1
px4io start
fi
if ver hwcmp PX4FMU_V4
then
snapdragon_rc_pwm start -d /dev/ttyS2
fmu mode_pwm4
fi
pwm failsafe -c 1234 -p 900
pwm disarmed -c 1234 -p 900
pwm arm
pwm rate -a -r 400
fi
unset MIXER
unset MAV_TYPE
unset OUTPUT_MODE
navigator start
if [ $VEHICLE_TYPE == none ]
then
echo "No autostart ID found"
fi
set FEXTRAS /fs/microsd/etc/extras.txt
if [ -f $FEXTRAS ]
then
echo "Addons script: $FEXTRAS"
sh $FEXTRAS
fi
unset FEXTRAS
if ver hwcmp CRAZYFLIE
then
else
if [ $LOG_FILE == /dev/null ]
then
tone_alarm error
fi
fi
fi
unset TUNE_ERR
mavlink boot_complete
if [ $EXIT_ON_END == yes ]
then
echo "NSH exit"
exit
fi
unset EXIT_ON_END
2.rc.interface文件
#!nsh
set SDCARD_MIXERS_PATH /fs/microsd/etc/mixers
if [ $MIXER != none -a $MIXER != skip ]
then
if [ $MIXER_AUX == none -a $USE_IO == yes ]
then
set MIXER_AUX $MIXER.aux
fi
if [ -f $SDCARD_MIXERS_PATH/$MIXER.main.mix ]
then
set MIXER_FILE $SDCARD_MIXERS_PATH/$MIXER.main.mix
else
if [ -f $SDCARD_MIXERS_PATH/$MIXER.mix ]
then
set MIXER_FILE $SDCARD_MIXERS_PATH/$MIXER.mix
else
set MIXER_FILE /etc/mixers/$MIXER.main.mix
fi
fi
if [ $OUTPUT_MODE == mkblctrl ]
then
set OUTPUT_DEV /dev/mkblctrl0
else
set OUTPUT_DEV /dev/pwm_output0
fi
if [ $OUTPUT_MODE == uavcan_esc ]
then
set OUTPUT_DEV /dev/uavcan/esc
fi
if [ $OUTPUT_MODE == tap_esc ]
then
set OUTPUT_DEV /dev/tap_esc
fi
if mixer load $OUTPUT_DEV $MIXER_FILE
then
echo "INFO [init] Mixer: $MIXER_FILE on $OUTPUT_DEV"
else
echo "ERROR [init] Error loading mixer: $MIXER_FILE"
echo "ERROR:[init] Could not load mixer: $MIXER_FILE" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
unset MIXER_FILE
else
if [ $MIXER != skip ]
then
echo "ERROR [init] Mixer not defined"
echo "ERROR [init] Mixer not defined" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
if [ $OUTPUT_MODE == fmu -o $OUTPUT_MODE == io ]
then
if [ $PWM_OUT != none ]
then
if [ $PWM_RATE != none ]
then
pwm rate -c $PWM_OUT -r $PWM_RATE
fi
if [ $PWM_DISARMED != none ]
then
pwm disarmed -c $PWM_OUT -p $PWM_DISARMED
fi
if [ $PWM_MIN != none ]
then
pwm min -c $PWM_OUT -p $PWM_MIN
fi
if [ $PWM_MAX != none ]
then
pwm max -c $PWM_OUT -p $PWM_MAX
fi
fi
if [ $FAILSAFE != none ]
then
pwm failsafe -d $OUTPUT_DEV $FAILSAFE
fi
fi
if ver hwcmp PX4FMU_V1
then
set MIXER_AUX none
fi
if ver hwcmp MINDPX_V2
then
set MIXER_AUX none
fi
if ver hwcmp CRAZYFLIE
then
set MIXER_AUX none
fi
if ver hwcmp AEROFC_V1
then
set MIXER_AUX none
fi
if [ $MIXER_AUX != none -a $AUX_MODE != none ]
then
set MIXER_AUX_FILE none
set OUTPUT_AUX_DEV /dev/pwm_output1
if [ -f $SDCARD_MIXERS_PATH/$MIXER_AUX.aux.mix ]
then
set MIXER_AUX_FILE $SDCARD_MIXERS_PATH/$MIXER_AUX.aux.mix
else
if [ -f /etc/mixers/$MIXER_AUX.aux.mix ]
then
set MIXER_AUX_FILE /etc/mixers/$MIXER_AUX.aux.mix
fi
fi
if [ $MIXER_AUX_FILE != none ]
then
if fmu mode_$AUX_MODE
then
if [ $OUTPUT_MODE == hil ]
then
if mixer append $OUTPUT_DEV $MIXER_AUX_FILE
then
echo "INFO [init] Mixer: $MIXER_AUX_FILE appended to $OUTPUT_DEV"
else
echo "ERROR [init] Error appending mixer: $MIXER_AUX_FILE"
echo "ERROR [init] Could not append mixer: $MIXER_AUX_FILE" >> $LOG_FILE
fi
fi
if [ -e $OUTPUT_AUX_DEV -a $OUTPUT_MODE != hil ]
then
if mixer load $OUTPUT_AUX_DEV $MIXER_AUX_FILE
then
echo "INFO [init] Mixer: $MIXER_AUX_FILE on $OUTPUT_AUX_DEV"
else
echo "ERROR [init] Error loading mixer: $MIXER_AUX_FILE"
echo "ERROR [init] Could not load mixer: $MIXER_AUX_FILE" >> $LOG_FILE
fi
else
set PWM_AUX_OUT none
set FAILSAFE_AUX none
fi
else
echo "ERROR: Could not start: fmu mode_pwm" >> $LOG_FILE
tone_alarm $TUNE_ERR
set PWM_AUX_OUT none
set FAILSAFE_AUX none
fi
if [ $PWM_AUX_OUT != none ]
then
if [ $PWM_AUX_RATE != none ]
then
pwm rate -c $PWM_AUX_OUT -r $PWM_AUX_RATE -d $OUTPUT_AUX_DEV
fi
if [ $PWM_AUX_MIN != none ]
then
pwm min -c $PWM_AUX_OUT -p $PWM_AUX_MIN -d $OUTPUT_AUX_DEV
fi
if [ $PWM_AUX_MAX != none ]
then
pwm max -c $PWM_AUX_OUT -p $PWM_AUX_MAX -d $OUTPUT_AUX_DEV
fi
fi
if [ $PWM_ACHDIS == none ]
then
set PWM_ACHDIS ${PWM_AUX_OUT}
fi
if [ $PWM_AUX_DISARMED != none -a $PWM_ACHDIS != none ]
then
pwm disarmed -c $PWM_ACHDIS -p $PWM_AUX_DISARMED -d $OUTPUT_AUX_DEV
fi
if [ $FAILSAFE_AUX != none ]
then
pwm failsafe -d $OUTPUT_AUX_DEV $FAILSAFE
fi
fi
fi
unset PWM_OUT
unset PWM_RATE
unset PWM_ACHDIS
unset PWM_MIN
unset PWM_MAX
unset PWM_AUX_OUT
unset PWM_AUX_RATE
unset PWM_AUX_DISARMED
unset PWM_AUX_MIN
unset PWM_AUX_MAX
unset FAILSAFE_AUX
unset FAILSAFE
unset OUTPUT_DEV
unset OUTPUT_AUX_DEV
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)