【Jetson NX】批量克隆教程
文章目录
- 【Jetson NX】批量克隆教程
- 一、批量克隆是什么?
- 二、克隆步骤
-
- 解压失败问题
-
一、批量克隆是什么?
辛辛苦苦在Jetson Xavier NX中配置完自己的环境,肯定不愿意重来折腾一次,好消息是装机用的sd卡可以像文件一下拷贝复制,配置完第一台nx后,只需以下步骤就能让你的jetson轻松生成。
二、克隆步骤
1.准备材料
1张配置好Jetson环境的SD卡;读卡器;一台Ubuntu系统主机;多张需要克隆的存储卡(大小需要大于或等于原SD卡容量一般为64G)
2.备份镜像
SD卡连上主机后,首先输入如下指令:
sudo fdisk -u -l
指令查看SD卡位置及分区情况
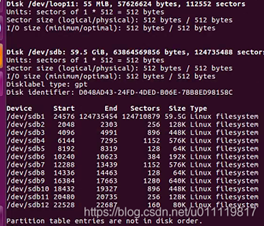
使用dd命令
sudo dd if=/dev/sdb conv=sync,noerror bs=4M | gzip -c > /home/用户名/backup_image.img.gz
if表示镜像输入位置,此处指定为SD卡/dev/sdb,conv=sync表示用每个输入块填充到ibs个字节,不足部分用空字符补齐。bs表示输入块的大小,官方教程使用512k,根据电脑情况此处使用4M,没有报错。gzip表示输出备份的位置,此处选择home/用户名/位置保存,压缩格式为.gz,用时大概为50min。
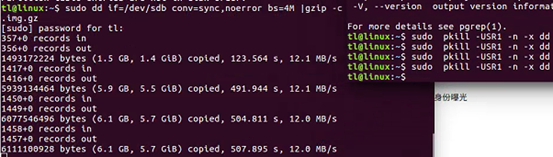
新建终端输入以下指令,在原窗口可查看解压速度,实测解压速度10M/s
sudo pkill -USR1 -n -x dd
备份完成之后,得到镜像文件,取下原SD卡,换上新SD卡,根据电脑情况,可插入多张(实测同时克隆8张)
3.克隆新SD卡
首先同样输入以下指令,查看SD卡位置
sudo fdisk -u -l
输入mount命令查看设备挂载情况
mount
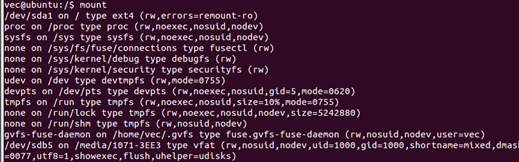
若设备被挂载,输入umount命令,直到没有sd卡被挂载。
umount /dev/sda*
然后输入指令查看SD卡分区情况
sudo fdisk /dev/sda
删除分区:d
添加分区:n
查看分区:p
保存操作:w
操作指令如上,因镜像克隆会创建分区,因此需要输入d删除所有分区,再输入w保存修改。
sudo su
解压需进入超级管理员模式,再输入dd命令解压镜像文件到SD卡,对其他SD卡重复操作,解压大概需要40min。
gunzip -c /home/用户名/backup_image.img.gz | dd of=/dev/sdb bs=4M
解压失败问题
提示:克隆之前一定要删除SD卡所有分区,不然克隆会失败,如果碰到ubuntu不能读取的SD卡,试试在window系统下格式化,实测可行。
参考
https://www.jetsonhacks.com/2020/08/08/clone-sd-card-jetson-nano-and-xavier-nx/
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)