一、基本配置
1、配置RCC、USART1、时钟84MHz
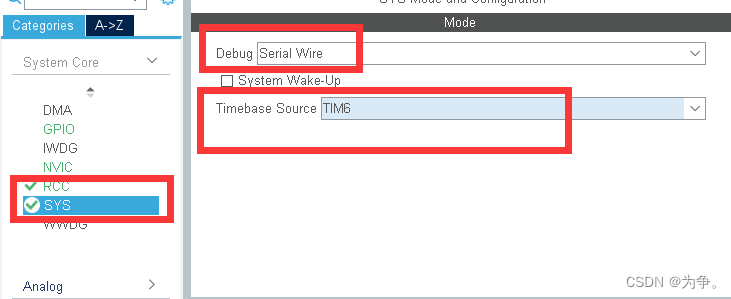
2、配置SYS,将Timebase Source修改为除滴答定时器外的其他定时器,因为滴答定时器被用于时钟基准,可以实现任务切换。Timebase Source是实现HAL_Delay等延时函数的
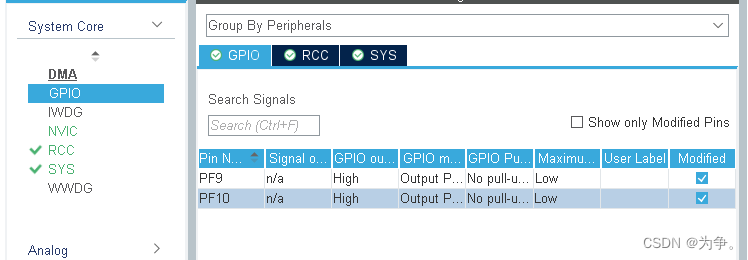
3、初始化LED的两个引脚
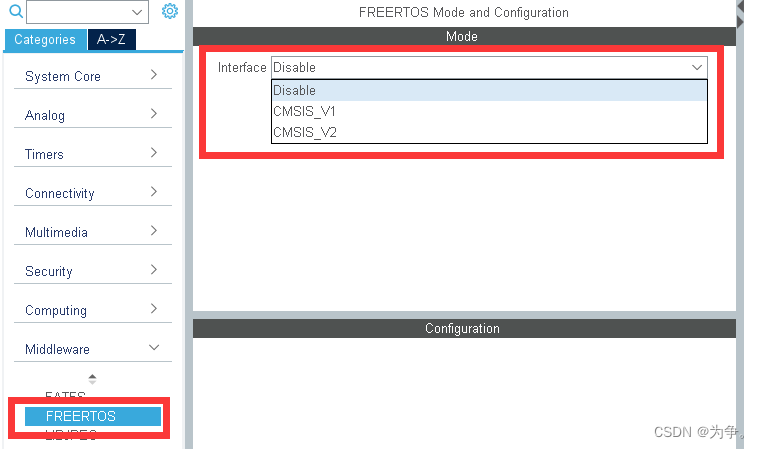
4、开启FreeRTOS,v1与v2版本不同,一般选用v1即可
二、参数解释
Config parameters
1、MPU/FPU:
ENABLE_FPU:Disable 开启浮点运算单元
2、Kernel settings
USE_PREEMPTION: Enabled:使用抢占式调度器;Disabled:使用协作式调度器(时间片)。
TICK_RATE_HZ: 值设置为1000,即周期就是1ms。RTOS系统节拍中断的频率,单位为Hz。
MAX_PRIORITIES: 可使用的最大优先级数量。设置好以后任务就可以使用从0到(MAX_PRIORITIES - 1)的优先级,其中0位最低优先级,(MAX_PRIORITIES - 1)为最高优先级。
MINIMAL_STACK_SIZE: 设置空闲任务的最小任务堆栈大小,以字为单位,而不是字节。如该值设置为128 Words,那么真正的堆栈大小就是 128*4 = 512 Byte。
MAX_TASK_NAME_LEN: 设置任务名最大长度。
IDLE_SHOULD_YIELD: Enabled 空闲任务放弃CPU使用权给其他同优先级的用户任务。
USE_MUTEXES: 为1时使用互斥信号量,相关的API函数会被编译。
USE_RECURSIVE_MUTEXES: 为1时使用递归互斥信号量,相关的API函数会被编译。
USE_COUNTING_SEMAPHORES: 为1时启用计数型信号量, 相关的API函数会被编译。
QUEUE_REGISTRY_SIZE: 设置可以注册的队列和信号量的最大数量,在使用内核调试器查看信号量和队列的时候需要设置此宏,而且要先将消息队列和信号量进行注册,只有注册了的队列和信号量才会在内核调试器中看到,如果不使用内核调试器的话次宏设置为0即可。
USE_APPLICATION_TASK_TAG: 为1时可以使用vTaskSetApplicationTaskTag函数。
ENABLE_BACKWARD_COMPATIBILITY: 为1时可以使V8.0.0之前的FreeRTOS用户代码直接升级到V8.0.0之后,而不需要做任何修改。
USE_PORT_OPTIMISED_TASK_SELECTION: FreeRTOS有两种方法来选择下一个要运行的任务,一个是通用的方法,另外一个是特殊的方法,也就是硬件方法,使用MCU自带的硬件指令来实现。STM32有计算前导零指令吗,所以这里强制置1。
USE_TICKLESS_IDLE: 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行。假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用ISP下载办法解决。
USE_TASK_NOTIFICATIONS: 为1时使用任务通知功能,相关的API函数会被编译。开启了此功能,每个任务会多消耗8个字节。
RECORD_STACK_HIGH_ADDRESS: 为1时栈开始地址会被保存到每个任务的TCB中(假如栈是向下生长的)。
3、Memory management setting
Memory Allocation: Dynamic/Static 支持动态/静态内存申请
TOTAL_HEAP_SIZE: 设置堆大小,如果使用了动态内存管理,FreeRTOS在创建 task, queue, mutex, software timer or semaphore的时候就会使用heap_x.c(x为1~5)中的内存申请函数来申请内存。这些内存就是从堆ucHeap[configTOTAL_HEAP_SIZE]中申请的。
Memory Management scheme: 内存管理策略 heap_4。
4、Hook function related definitions
USE_IDLE_HOOK: 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子。
USE_TICK_HOOK: 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子。
USE_MALLOC_FAILED_HOOK: 使用内存申请失败钩子函数。
CHECK_FOR_STACK_OVERFLOW: 大于0时启用堆栈溢出检测功能,如果使用此功能用户必须提供一个栈溢出钩子函数,如果使用的话此值可以为1或者2,因为有两种栈溢出检测方法。
5、Run time and task stats gathering related definitions:
GENERATE_RUN_TIME_STATS: 启用运行时间统计功能。
USE_TRACE_FACILITY: 启用可视化跟踪调试。
USE_STATS_FORMATTING_FUNCTIONS: 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数prvWriteNameToBuffer()、vTaskList()、vTaskGetRunTimeStats()。
6、Co-routine related definitions:
USE_CO_ROUTINES: 启用协程。
MAX_CO_ROUTINE_PRIORITIES: 协程的有效优先级数目。
7、Software timer definitions:
USE_TIMERS: 启用软件定时器。
8、Interrupt nesting behaviour configuration:
LIBRARY_LOWEST_INTERRUPT_PRIORITY: 中断最低优先级。
LIBRARY_LOWEST_INTERRUPT_PRIORITY: 系统可管理的最高中断优先级。
三、FreeRTOS配置

Tasks and Queues中有一个默认空闲任务,此时我们添加两个LED线程。
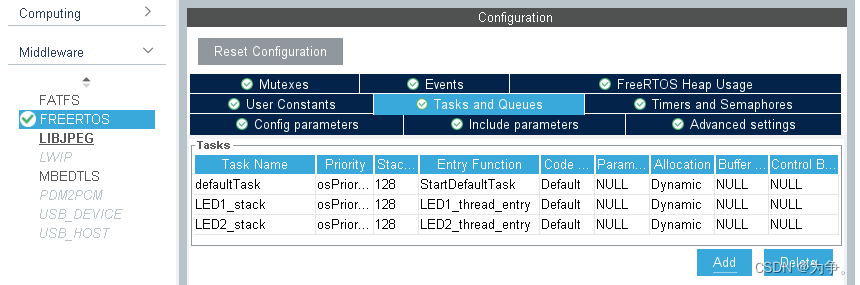
Task Name: 任务名称
Priority: 优先级,在 FreeRTOS 中,数值越大优先级越高,0 代表最低优先级
Stack Size (Words): 堆栈大小,单位为字,在32位处理器(STM32),一个字等于4字节,如果传入512那么任务大小为512*4字节
Entry Function: 入口函数
Code Generation Option: 代码生成选项
Parameter: 任务入口函数形参,不用的时候配置为0或NULL即可
Allocation: 分配方式:Dynamic 动态内存创建
Buffer Name: 缓冲区名称
Conrol Block Name: 控制块名称
四、API
1、静态创建一个线程osThreadCreate
osThreadId LED1_stackHandle;
void LED1_thread_entry(void const * argument);
osThreadDef(LED1_stack, LED1_thread_entry, osPriorityIdle, 0, 128);
LED1_stackHandle = osThreadCreate(osThread(LED1_stack), NULL);
void LED1_thread_entry(void const * argument)
{
/* USER CODE BEGIN LED1_thread_entry */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_9);
HAL_Delay(1000);
}
/* USER CODE END LED1_thread_entry */
}
2、删除一个线程osThreadTerminate
osThreadTerminate(LED2_stackHandle);
使用此函数需要将vTaskDelete选至Enable
3、相对延时osDelay();
osDelay(100);
使用此函数需要将vTaskDelay选至Enable
4、绝对延时函数osThreadTerminate

void vTaskA( void * pvParameters )
{
/* 用于保存上次时间。调用后系统自动更新 */
static portTickType PreviousWakeTime;
/* 设置延时时间,将时间转为节拍数 */
const portTickType TimeIncrement = pdMS_TO_TICKS(1000);
/* 获取当前系统时间 */
PreviousWakeTime = osKernelSysTick();
while (1)
{
/* 调用绝对延时函数,任务时间间隔为 1000 个 tick */
osDelayUntil( &PreviousWakeTime,TimeIncrement );
// ...
// 这里为任务主体代码
// ...
}
}
5、开启任务调度器 osKernelStart
osKernelStart();
6、挂起指定任务osThreadSuspend
osThreadSuspend (LED2_stackHandle);
7、挂起所有任务osThreadSuspendAll
osThreadSuspendAll();
8、让挂起的任务重新进入就绪状态osThreadResume
osThreadResume(LED2_stackHandle);
9、将所有的任务都恢复osThreadResumeAll
osThreadResumeAll();
需要注意的是,调用了多少次 osThreadSuspendAll() 函数就必须同样调用多少次 osThreadResumeAll() 函数。
10、获取当前任务的状态osThreadGetState
五、总结
延时:
osDelay(1000);
创建一个线程:
osThreadId LED2_stackHandle;
osThreadDef(LED2_stack, LED2_thread_entry, osPriorityIdle, 0, 128);
LED2_stackHandle = osThreadCreate(osThread(LED2_stack), NULL);
删除led2线程:
osThreadTerminate(LED2_stackHandle);
挂起led2线程:
osThreadSuspend(LED2_stackHandle);
挂起所有线程:
osThreadSuspendAll();
将挂起的led2线程恢复到就绪状态:
osThreadResume(LED2_stackHandle);
将挂起的所有的任务都恢复:
osThreadResumeAll();
获取任务状态:
osThreadGetPriority(LED1_stackHandle);
参考:STM32CubeMX学习笔记(28)——FreeRTOS实时操作系统使用(任务管理)_Leung_ManWah的博客-CSDN博客
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)