目录
1.编辑urdf文件。
(1)dynamic标签
(2)gazebo标签
(3)transmission标签
(4)ros_control插件
2.编辑yaml文件
3.编辑launch文件启动gazebo仿真环境
4.编写程序控制机器人关节往复运动
5.运行效果
6.全部源码地址
为了方便入门和理解,我们这里建立一个最简单的单关节机器人,以此来入门机器人的gazebo仿真。
1.编辑urdf文件。
首先,我们在solidworks里面新建好机器人模型,然后导出urdf文件。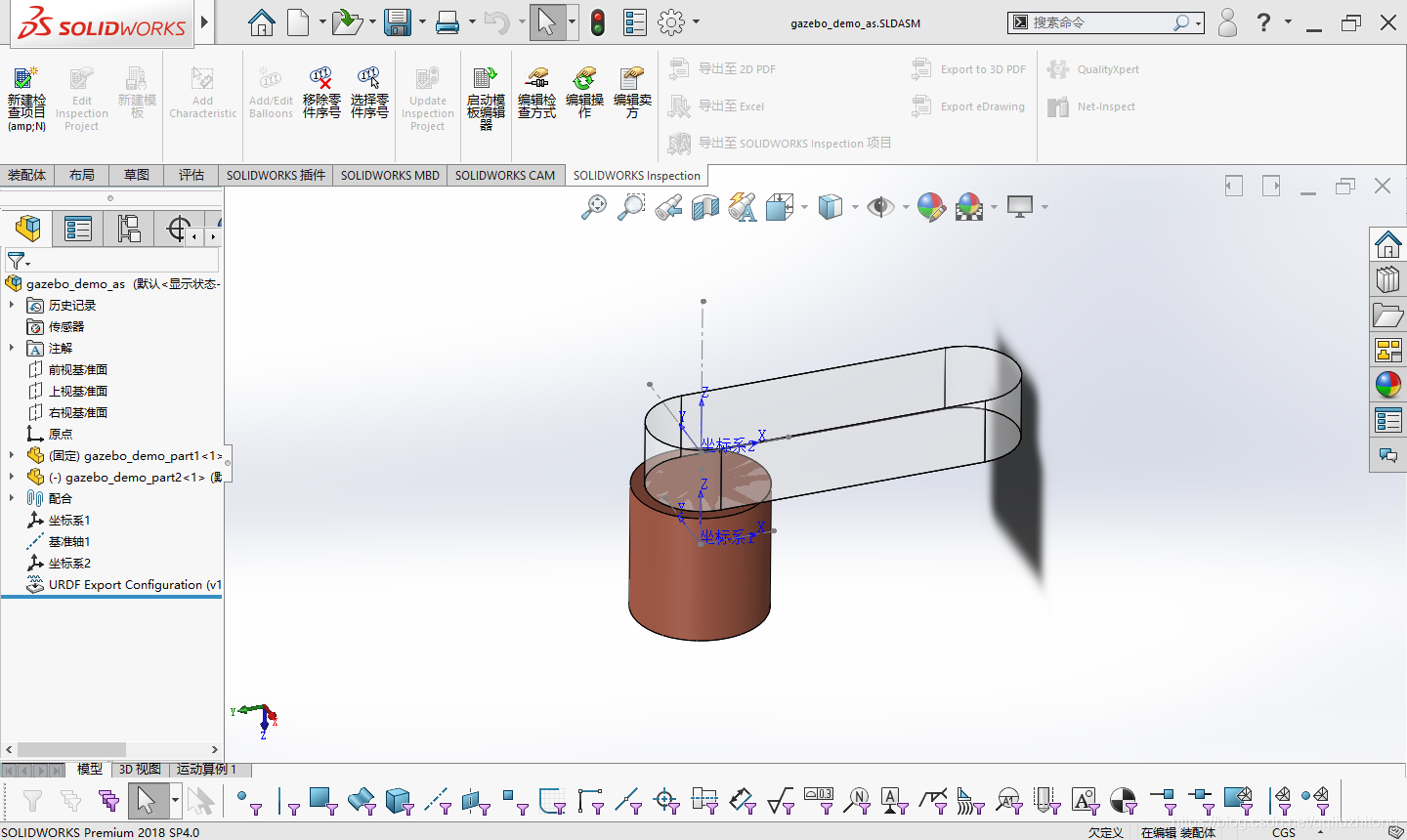
导出了urdf文件之后呢,我们就需要给urdf文件重新修改了, 首先直接修改文件名,在后面添加上.xacro后缀,改成了xacro文件。
里面有solidworks软件里面的插件(转urdf插件)自己生成的两个连杆(base_link和link_1)和一个关节(joint_1)。然后我们就需要给其添加gazebo仿真所需要的标签了。
(1)dynamic标签
这个标签主要涉及动力学。
改标签是link标签的子标签,因此这个标签添加在link标签下面,每个link都需要一个dynamic标签。这个标签我们设置两个属性,第一个属性damping是阻尼系数,我们设置为0.7,第二个标签是摩擦系数,我们设置为0.5.
<dynamic damping="0.7" friction="0.5"/>
(2)gazebo标签
这个标签主要设置连杆的颜色等属性。
<gazebo reference="link_1">
<material>Gazebo/Black</material>
</gazebo>
(3)transmission标签
这个标签主要是设置关节驱动器,关节驱动器一般是电机,舵机这些,用于驱动关节,改变关节变量用的,每个活动关节都需要设置一个关节驱动电机,设置的每个关节驱动电机都需要和对应的关节绑定,以此来说明改驱动器驱动该关节。
<transmission name="joint_1_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint_1">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="joint_1_motor">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
(4)ros_control插件
此外我们还需要用gazebo标签来载入ros_control插件,由于我们整个驱动控制是基于ros_control做的,因此需要载入该插件,这个插件会给我们自动处理其余的任务,我们无需自己配置。
需要注意的是下面的<robotNamespace>标签,这个标签声明命名空间,这个需要留意一下。
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/gazebo_demo</robotNamespace>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
<legacyModeNS>true</legacyModeNS>
</plugin>
</gazebo>
添加了这些之后,我们的urdf文件就修改好了。
修改好之后的urdf文件如下:
<?xml version="1.0" encoding="utf-8"?>
<!-- This URDF was automatically created by SolidWorks to URDF Exporter! Originally created by Stephen Brawner (brawner@gmail.com)
Commit Version: 1.5.1-0-g916b5db Build Version: 1.5.7152.31018
For more information, please see http://wiki.ros.org/sw_urdf_exporter -->
<robot
name="gazebo_demo">
<link
name="base_link">
<inertial>
<origin
xyz="0 9.74542958129844E-19 -4.31390337655099E-18"
rpy="0 0 0" />
<mass
value="6.99004365423729" />
<inertia
ixx="0.0101938136624294"
ixy="0"
ixz="-3.37700910261971E-35"
iyy="0.0101938136624294"
iyz="-8.16962303997948E-35"
izz="0.00873755456779662" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://gazebo_demo/meshes/base_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.537254901960784 0.349019607843137 0.337254901960784 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://gazebo_demo/meshes/base_link.STL" />
</geometry>
</collision>
<dynamic damping="0.7" friction="0.5"/>
</link>
<gazebo reference="base_link">
<material>Gazebo/Black</material>
</gazebo>
<link
name="link_1">
<inertial>
<origin
xyz="0.1 -1.86377227087894E-19 -1.38777878078145E-17"
rpy="0 0 0" />
<mass
value="1.12492033114729" />
<inertia
ixx="0.000798459868114599"
ixy="1.67727625611222E-20"
ixz="8.85083255431749E-21"
iyy="0.00679752984625413"
iyz="9.66746937132908E-21"
izz="0.00712727290972403" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://gazebo_demo/meshes/link_1.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 0.32" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://gazebo_demo/meshes/link_1.STL" />
</geometry>
</collision>
<dynamic damping="0.7" friction="0.5"/>
</link>
<gazebo reference="link_1">
<material>Gazebo/Black</material>
</gazebo>
<joint
name="joint_1"
type="revolute">
<origin
xyz="0 0 0.075"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="link_1" />
<axis
xyz="0 0 -1" />
<limit
lower="-1.57"
upper="1.57"
effort="1"
velocity="10" />
</joint>
<transmission name="joint_1_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint_1">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="joint_1_motor">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/gazebo_demo</robotNamespace>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
<legacyModeNS>true</legacyModeNS>
</plugin>
</gazebo>
</robot>
2.编辑yaml文件
yaml文件为配置文件,主要配置关节控制器的物理参数,例如控制器类型,和pid等参数。
控制器类型一共有三种,分别是:位置控制,速度控制和力控制。
我这里配置好的文件如下。
gazebo_demo:
# Publish all joint states -----------------------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
# Position Controllers ---------------------------------------
joint1_position_controller:
type: position_controllers/JointPositionController
joint: joint_1
#pid: {p: 100.0, i: 0.01, d: 10.0}
gazebo_demo/gazebo_ros_control/pid_gains:
joint_1: {p: 100.0, i: 0.0, d: 10.0}
3.编辑launch文件启动gazebo仿真环境
这里我也编辑好了,如下:
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find gazebo_demo)/urdf/gazebo_demo.urdf.xacro" />
<!-- these are the arguments you can pass this launch file, for example paused:=true -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find gazebo_demo)/worlds/gazebo_demo.world"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model myrobot -param robot_description"/>
<rosparam file="$(find gazebo_demo)/config/joint_names_gazebo_demo.yaml" command="load"/>
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" ns="/gazebo_demo" args="joint1_position_controller"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"
respawn="false" output="screen">
<remap from="/joint_states" to="/gazebo_demo/joint_states" />
</node>
</launch>
启动之后就可以看到这个机器人出现在了地面上。
4.编写程序控制机器人关节往复运动
这里编写了一个简单的节点进行控制,程序如下:
#include "ros/ros.h"
#include "std_msgs/Float64.h"
#include <sstream>
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"control_gazebo_demo");
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<std_msgs::Float64>("/gazebo_demo/joint1_position_controller/command",10);
std_msgs::Float64 control_gazebo_demo;
control_gazebo_demo.data=0.0;
bool flag=0;//0weizeng 1weijian
ros::Rate r(50);
while (ros::ok())
{
for(control_gazebo_demo.data=0.0;control_gazebo_demo.data<=1.5;control_gazebo_demo.data+=0.01)
{
pub.publish(control_gazebo_demo);
ROS_INFO("发送的消息:%f",control_gazebo_demo);
r.sleep();
}
for(control_gazebo_demo.data=1.5;control_gazebo_demo.data>=0.0;control_gazebo_demo.data-=0.01)
{
pub.publish(control_gazebo_demo);
ROS_INFO("发送的消息:%f",control_gazebo_demo);
r.sleep();
}
ros::spinOnce();
}
return 0;
}
5.运行效果
6.全部源码地址
源码地址:
https://gitee.com/li9535/gazebo_simulation_ros_package/tree/master/
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)