文章目录
- 准备工作
- 1. host端(ubuntu)配置
- 2. 连接线
- 3. 安装 NVIDIA SDK Manager
- 开始刷机
-
准备工作
1. host端(ubuntu)配置
要有一台安装有 ubuntu 系统的主机,且有30GB以上的可用空间。
配置USB启动Ubuntu系统
2. 连接线
两机连接过程中需采用TX2包装盒里的原装线,其他线可能导致连接不上的问题。

其实只要是具有传输功能的线,应该都可以。
3. 安装 NVIDIA SDK Manager
在 Host 端下载 NVIDIA SDK Manager。
官网
进入下载界面之后需要选择对应版本的工具进行下载安装,如下图:
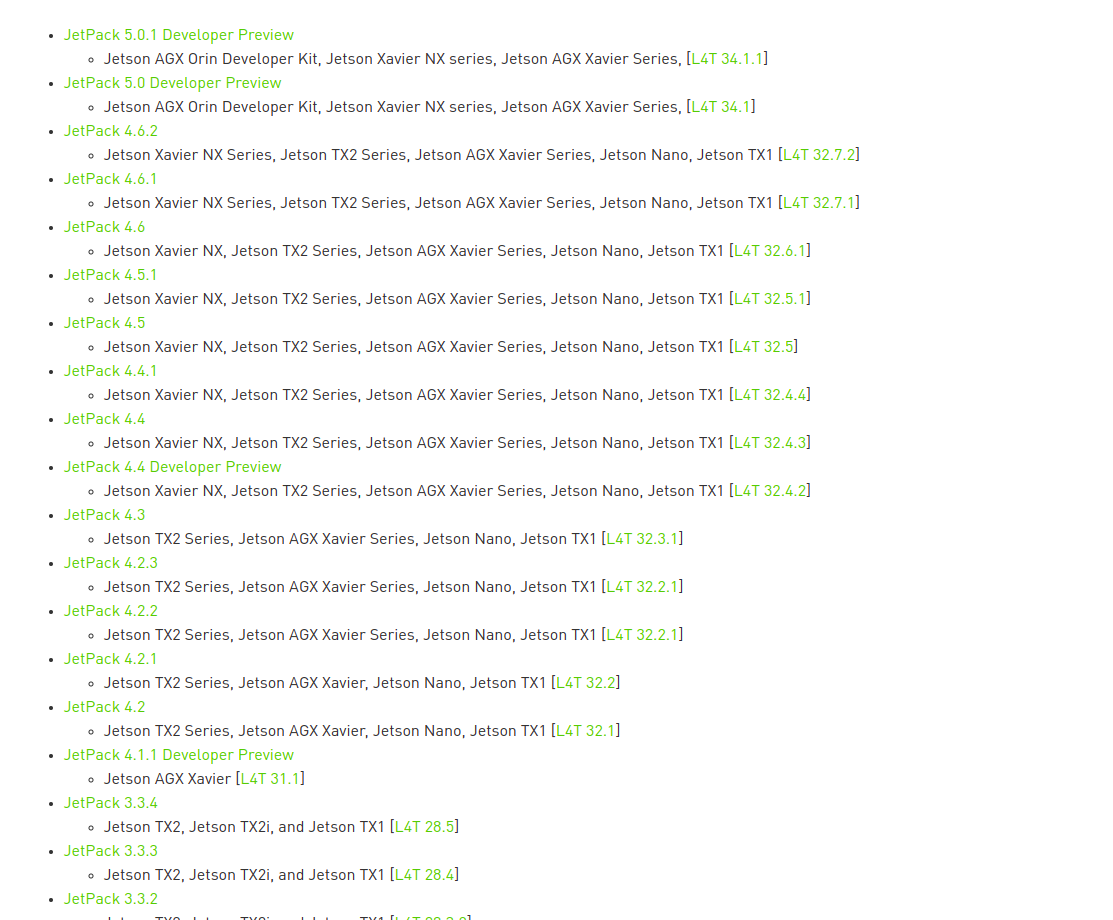
查看历史版本
这里我选择的是4.6.2版本
我们最终下载到的是一个deb安装包,进入到安装包所在目录进行安装即可。安装命令如下:
sudo dpkg -i 你获取到的安装包
或者直接用鼠标将下载到的文件打开,进行安装就好。
安装完成之后在命令行界面输入sdkmanager即可进入NVIDIA SDK Manager。在这里,你需要拥有一个NVIDIA开发者账号并进行登录,没有的话注册一个也很快。
开始刷机
STEP1
若系统是 ubuntu20.04 ,可能识别失败。
可以通过修改/etc/os-release 中的 VERSION_ID ,将其改为18.04,解决问题。
那如果一直没连接上怎么办呢,有以下几种排查方法: [1] 检查是否使用的是官方线 [2] 检查此时TX2是否在恢复模式,只有在恢复模式下才可以连接 [3] 若主机端使用的是虚拟机,检查USB设备是否连接在虚拟机上 保证连接正常的情况(SDK manager显示为connected)下,进入STEP2。
如何进入恢复模式
- 用micro usb线把开发板连接到电脑上(类似于手机连接电脑)
- 接通AC电源,按下power键,开机
- 刚一开机,就长按Recovery键不松开,然后点按一下Reset键(Down and Up),过2秒以后才松开Recovery键,此时开发板处于强制恢复模式。
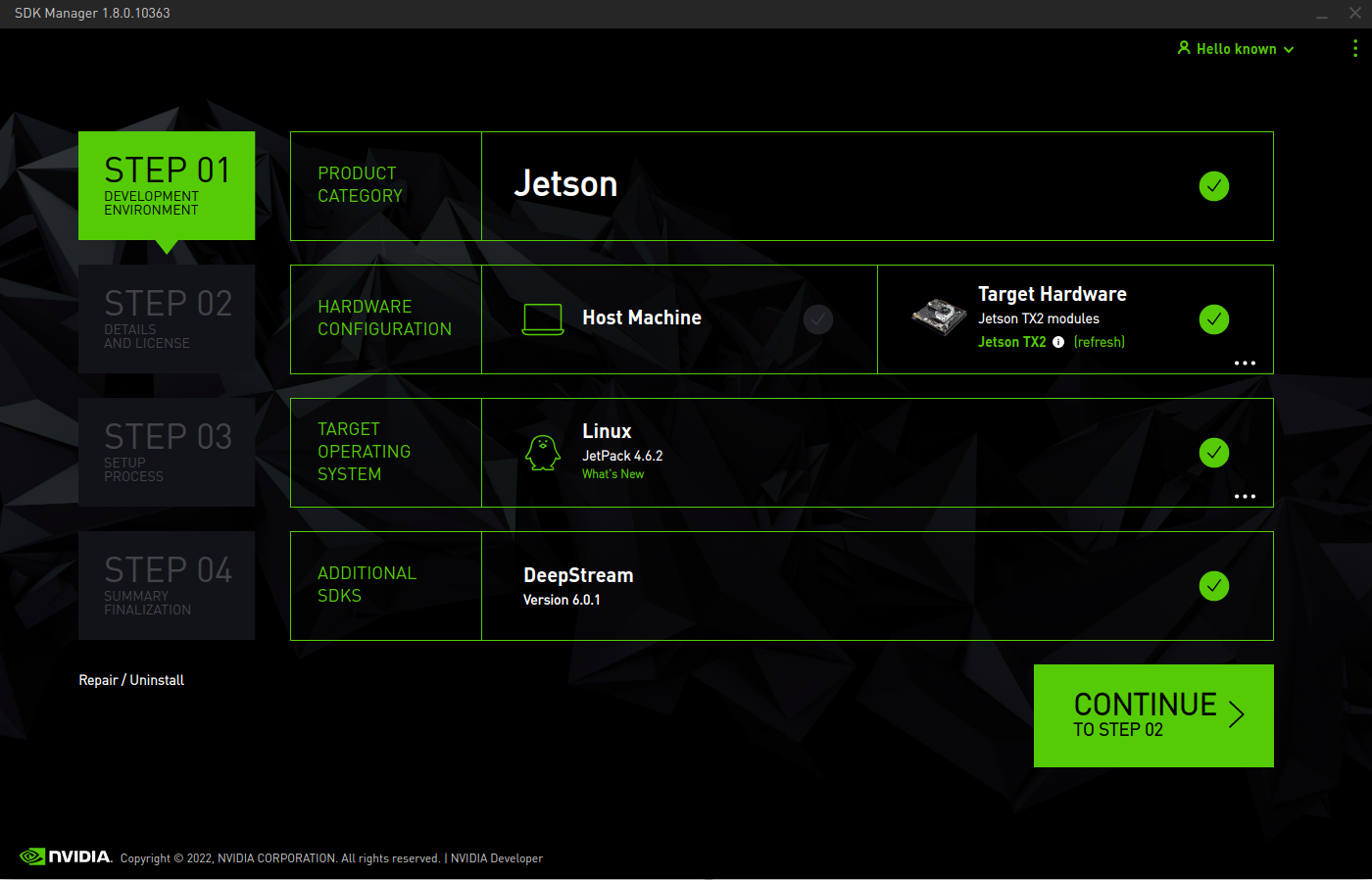
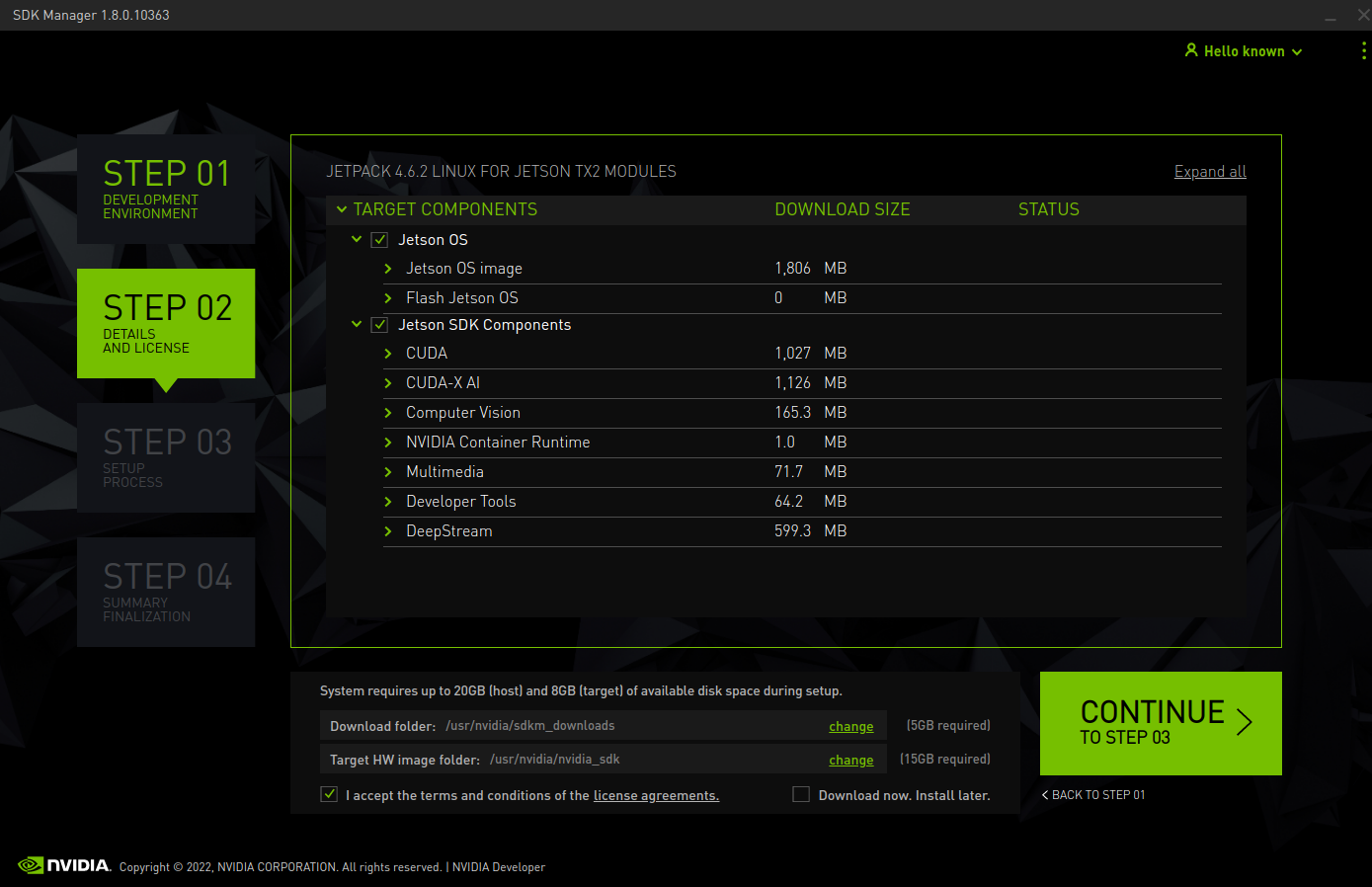
STEP2
第一个沟打上;
第二个沟,看个人情况:如果是网速够快,不需要分为两个阶段,直接不选Download now,install later,下载完成之后就安装。
STEP3
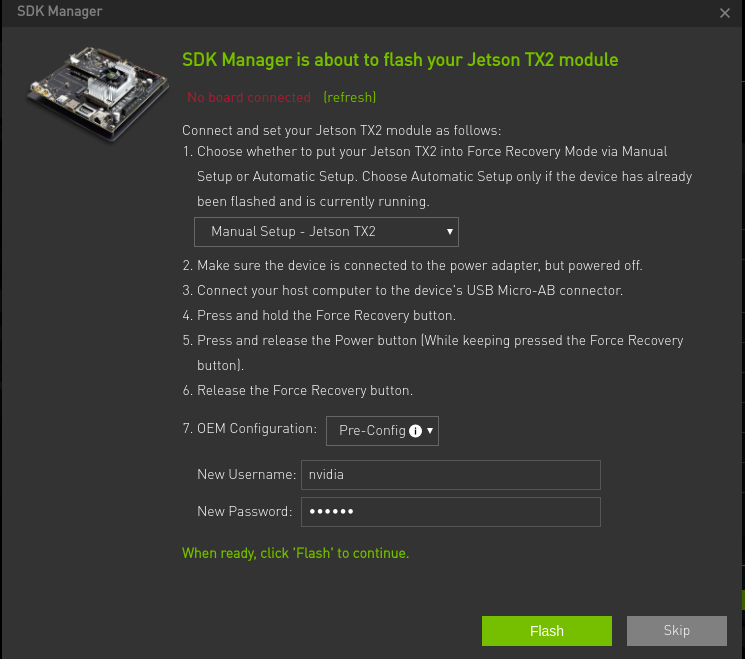
STEP3进行一段时间后回弹出上图所示的窗口,代表开始烧录Jetson OS系统(就是老黄魔改版ubuntu), 选择Manual Setup。
通过TX2提供的黑色USB线(带有绿色标识)将TX2和HOST连接,并以recovery模式启动TX2(保证TX2接通电源但处于关机状态;按下power键后迅速按下recovery键;保持recovery按下的同时按下RST键然后松开RST键,松开recovery键)点击flash。 一段时间后系统烧录完成,把TX2接上显示屏与键鼠,做一些系统基本设置进入TX2桌面,接下来将进行SDK的安装(CUDA, CUDNN, TensorRT, DeepStream等),先别急着回到host主机那边进行下一步安装,还是把目光放在TX2这边,对其进行一波换源,否则之后必下载失败。
TX2端
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse
sudo apt-get update
sudo apt-get upgrade
Host端
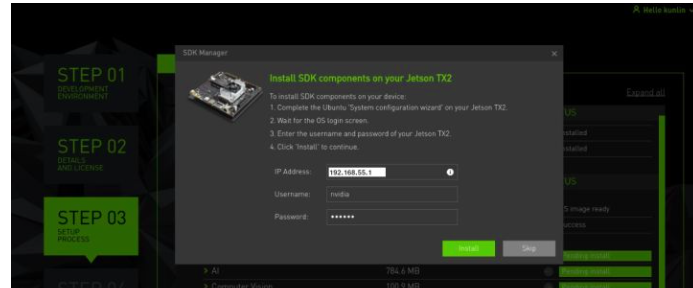
这里TX2会默认分配一个ip地址192.168.55.1(可能会有不同),反正不要改动,该ip地址是有那根miniUSB有线连接上后由TX2生成的,可以用于后续操作。也正是基于这一点,TX2和ubuntu的系统并不需要在同一局域网而去连手机热点或是路由器,反而增加了劳动成本。 点击install将开始后续SDK的安装, SDK的安装依赖网络环境,需要耐心等待,也有可能最后安装失败,此时SDK会提示你回到STEP1,那就继续从STEP1往下走,但是这个时候到STEP2时就无需勾选Jetson OS了(系统已经装好了,再勾就是又重新安一遍系统)。 耐心一点,多试几次就可以安装完成的,以上步骤均经过实践检验,可放心使用。
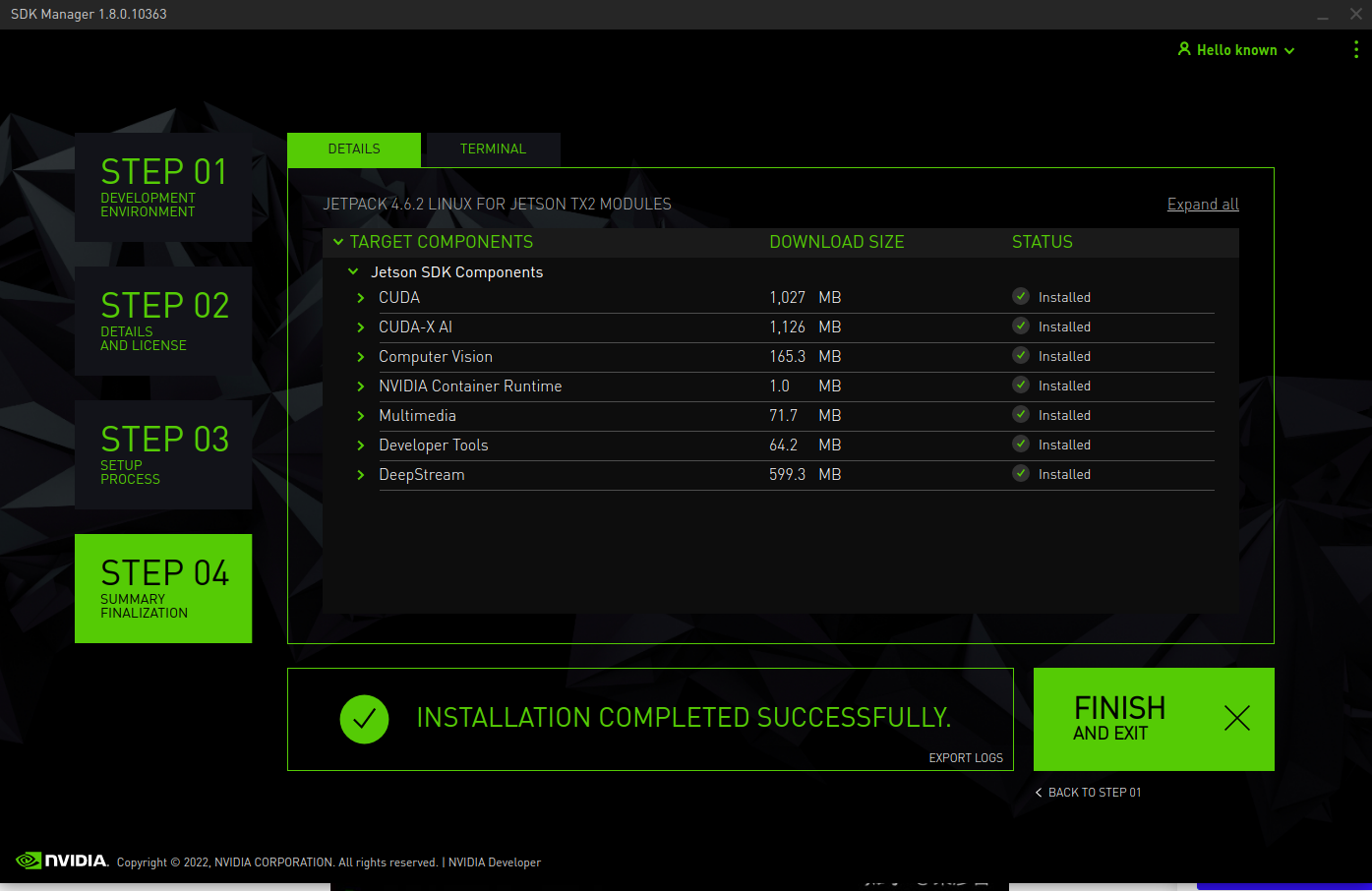
STEP4
安装成功!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)