LQR全称为Linear Quadratic Regulator,即线性二次型调节器。
(一)有限时域最优调节器设计
设线性系统被控对象的离散化状态方程为:

初始条件 。
。
给定二次型性能指标函数:

LQR的任务是寻求最优控制序列 ,在把系统从初始状态
,在把系统从初始状态 转移到
转移到 的过程中,使性能指标函数最小。
的过程中,使性能指标函数最小。
求解二次型最优控制问题可采用变分法、动态规划法等方法,这里采用离散动态规划法来求解。
动态规划的基本思想是:将一个多级决策过程转变为求解多个单级决策优化问题,这里需要决策的是控制变量。
令二次型性能指标函数:

其中, 。
。
下面从最后一级往前逐级求解最优控制序列。
由上式可得:

首先求解 ,使得
,使得 最小。令:
最小。令:

解得:

式中,
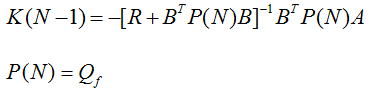
同时可以得到:

式中,

依次可求得 。
。
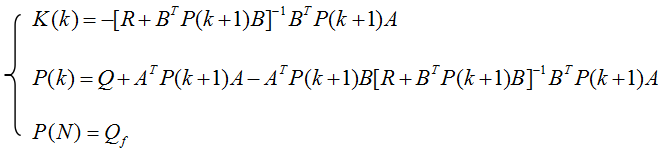
综上,计算 的公式归纳如下:
的公式归纳如下:

式中 。
。
最优性能指标为:

满足上式的最优控制一定存在且是唯一的。
(二)无限时域最优调节器设计
设线性系统被控对象的离散化状态方程为:
初始条件。
当 时,性能指标函数简化为:
时,性能指标函数简化为:

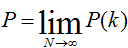
其中Q是非负定对称矩阵,R是正定对称矩阵,假定系统[A,B]能控和能观,设P(k)是如下黎卡提(Riccati)方程的解:
那么,下列结论成立:
- 对于任意非负定对称矩阵
 ,
, 存在,且是与无关的常数矩阵。
存在,且是与无关的常数矩阵。 - P是如下黎卡提(Riccati)方程的唯一正定解。


是使上面性能指标函数 极小的最优反馈控制律,最优性能指标函数为:
极小的最优反馈控制律,最优性能指标函数为:

当终端时间 时,矩阵
时,矩阵 趋于某个常数矩阵,因此反馈矩阵
趋于某个常数矩阵,因此反馈矩阵 也为常数矩阵,便于工程实现。
也为常数矩阵,便于工程实现。
附录 同济大学《线性代数》中关于正定和负定的定义及相关说明


本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)