提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、事件标志位是什么?
- 二、API介绍
- 1.事件标志位的创建
- 2.事件标志位的设置
- 3.事件标志位清除
- 4.获取某一位的事件清除函数
- 三、案例
- 总结
前言
今天又学习了FreeRTOS的事件标志位的处理。呀呼。
一、事件标志位是什么?
事件标志位能有效的解决一个任务与多个任务的同步,这是信号量不能解决的。
事件标志位就是指定一个位来存储一个任务或者事件的标志,是运行还是没有运行,运行就将这位置‘1’,没有运行就置‘0’,然后在获取这个位的标志来判断这个任务或者事件是否在运行。
二、API介绍
1.事件标志位的创建

EventGroupHandle_t xEventGroupCreate( void )
2.事件标志位的设置
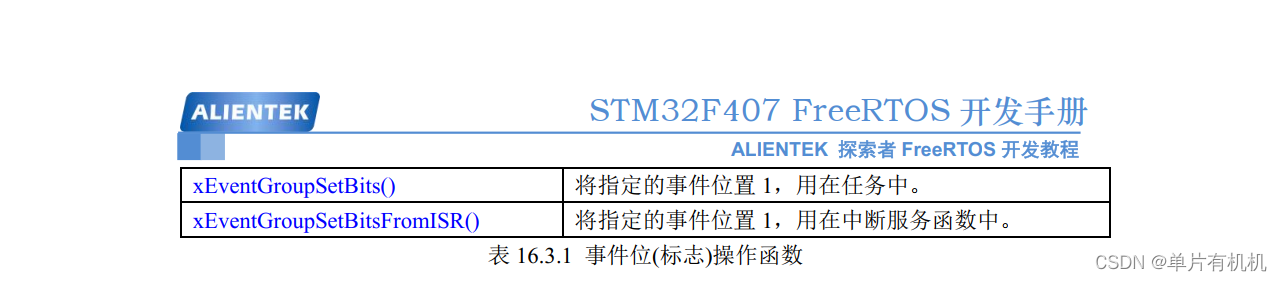
EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet )
3.事件标志位清除

EventBits_t xEventGroupClearBits( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToClear )
4.获取某一位的事件清除函数

EventBits_t xEventGroupWaitBits( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToWaitFor,
const BaseType_t xClearOnExit,
const BaseType_t xWaitForAllBits,
TickType_t xTicksToWait )
三、案例
main.c
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
#include "Timers.h"
#include "event_groups.h"
#include "stdio.h"
#include "Key.h"
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1, (uint8_t*)&ch,1,HAL_MAX_DELAY);
return ch;
}
TaskHandle_t HandlerTask1;
TaskHandle_t Task_Name4;
BaseType_t xReturn;
SemaphoreHandle_t Task1semaphore;
TimerHandle_t AutoTimerTask;
TimerHandle_t OneTimerTask;
EventGroupHandle_t EventGroupTask1;
void SystemClock_Config(void);
StackType_t xTask3Static[128];
StaticTask_t xTaskTCB;
StackType_t xIdle3Static[128];
StaticTask_t xIdleTCB;
StackType_t xTimerStatic[526];
StaticTask_t xTimerTCB;
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,StackType_t ** ppxIdleTaskStackBuffer,uint32_t * pulIdleTaskStackSize ){
*ppxIdleTaskTCBBuffer=&xIdleTCB;
*ppxIdleTaskStackBuffer=xIdle3Static;
*pulIdleTaskStackSize=128;
}
void vApplicationGetTimerTaskMemory( StaticTask_t ** ppxTimerTaskTCBBuffer,
StackType_t ** ppxTimerTaskStackBuffer,
uint32_t * pulTimerTaskStackSize ){
* ppxTimerTaskTCBBuffer=&xTimerTCB;
* ppxTimerTaskStackBuffer=xTimerStatic;
* pulTimerTaskStackSize=526;
}
void Task1Function( void * param){
for(;;){
vTaskDelay(100);
}
}
void Task2Function(void* param){
uint8_t num;
EventBits_t EventFlag;
for(;;)
{
num=Key_config();
if(EventGroupTask1!=NULL){
switch(num){
case 1:
xEventGroupSetBits(EventGroupTask1,(1<<0));
break;
case 2:
xEventGroupSetBits(EventGroupTask1,(1<<2));
break;
case 3:
#if 1
EventFlag=xEventGroupWaitBits((EventGroupHandle_t) EventGroupTask1,
(EventBits_t) (1<<0)|(1<<2),
(BaseType_t) pdTRUE,
(BaseType_t) pdFALSE,
(TickType_t) 50);
#else
EventFlag=xEventGroupGetBits(EventGroupTask1);
#endif
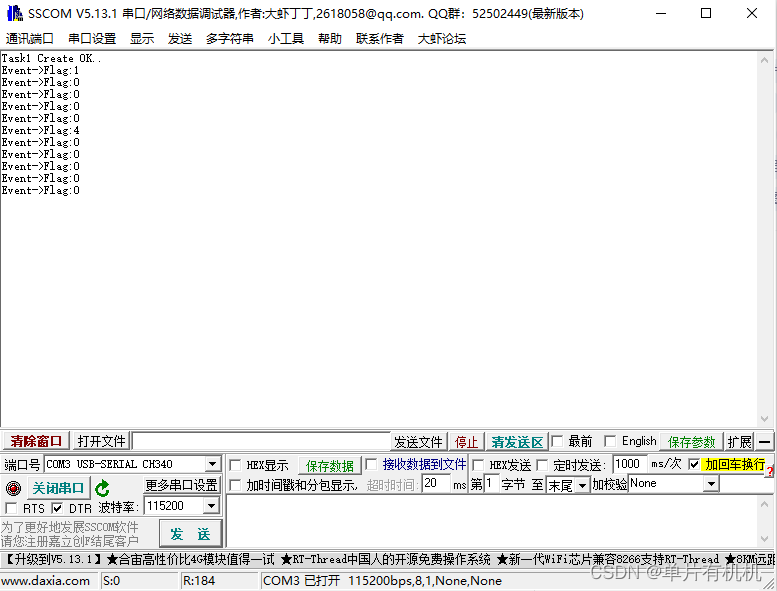
printf("Event->Flag:%d\r\n",EventFlag);
break;
}
}
}
}
void Task3Funtion(void* param){
TickType_t st_time=xTaskGetTickCount();
while(1){
uint32_t num =1;
xTaskDelayUntil(&st_time,30);
}
}
void Task4Funtion(void* param){
taskENTER_CRITICAL();
EventGroupTask1=xEventGroupCreate();
xReturn=xTaskCreate(Task1Function,"Task1",128,NULL,2,&HandlerTask1);
xTaskCreate(Task2Function,"Task2",128,NULL,2,NULL);
xTaskCreateStatic(Task3Funtion,"Task3",128,NULL,2,xTask3Static,&xTaskTCB);
if(xReturn == pdPASS){
uint8_t buffS[20]="Task1 Create OK..\r\n";
HAL_UART_Transmit(&huart1,(uint8_t*)buffS,strlen(buffS)*sizeof(char),HAL_MAX_DELAY);
}
vTaskDelete(Task_Name4);
taskEXIT_CRITICAL();
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
xTaskCreate(Task4Funtion,"Task4",600,NULL,1,&Task_Name4);
vTaskStartScheduler();
while (1)
{
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
void Error_Handler(void)
{
__disable_irq();
while (1)
{
}
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t *file, uint32_t line)
{
}
#endif
效果展示
总结
事件标志位总的说就是用来记录任务或者事件的运行状态的。
有些人心如花木,皆向阳而生 --《剑来》
何为凡人,何为仙,岂闻韶华尽何年,回首沧桑,此恨绵绵,风月如剑,看我破天。道不尽仙凡殊途,尽人间 --《凡人修仙传》
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)