文章目录
- 前言
- 非常棒的GINS数据集
- 采集轨迹
- 采集时间
- MEMS IMU详细信息
- IMU测量值方程及相关误差建模
- 参考噪声参数
- 安装参数
- 文件格式描述
前言
“本文作者感谢武汉大学多源智能导航实验室和牛小骥教授提供了本文所需的GNSS/INS数据集。”
本博文介绍数据集链接为多IMU车载GNSS、INS数据集,欢迎大家下载,由于是开源数据集,因此下载不需要积分
非常棒的GINS数据集
这是一套非常好的用于GNSS/INS组合导航应用的车载数据集,本数据集采集于湖北省武汉市一处工业园区,为开阔天空场景,GNSS RTK定位良好。数据集包括GNSS定位结果、IMU原始数据和高精度参考真值,以及对应的噪声参数和安装参数。本数据集最大的特点是提供了四种不同型号的MEMS IMU数据,包括消费级MEMS芯片和工业级MEMS模块。
采集轨迹
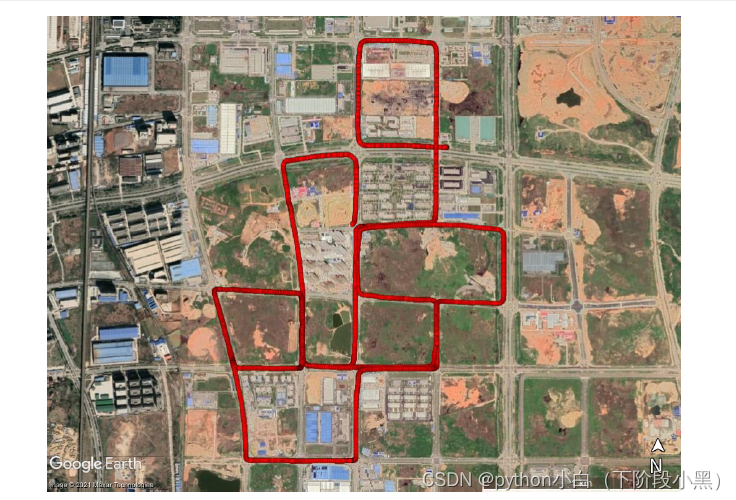
采集时间
整个数据集的采集持续时间为1617s
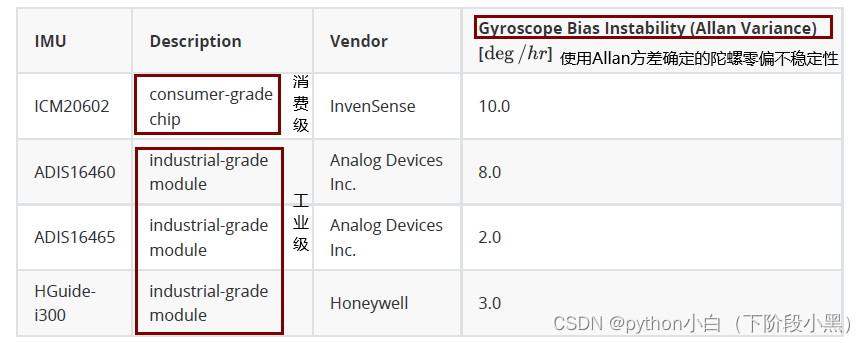
MEMS IMU详细信息
该数据集中包含4个MEMS imu,这些imu的详细信息如下:
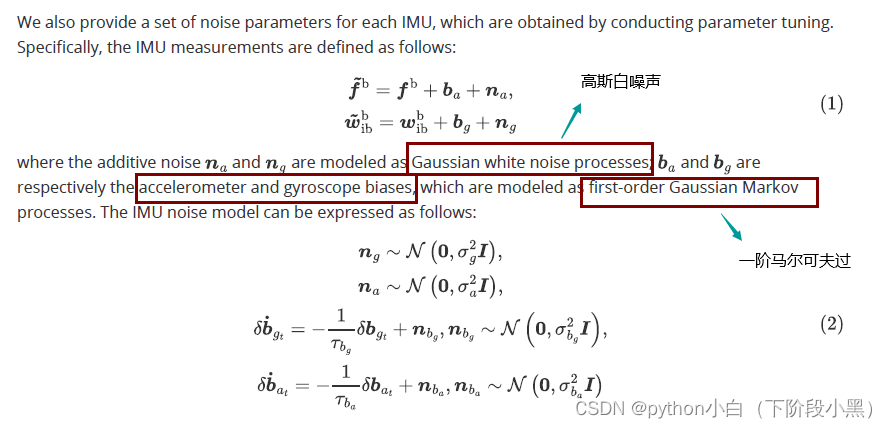
IMU测量值方程及相关误差建模
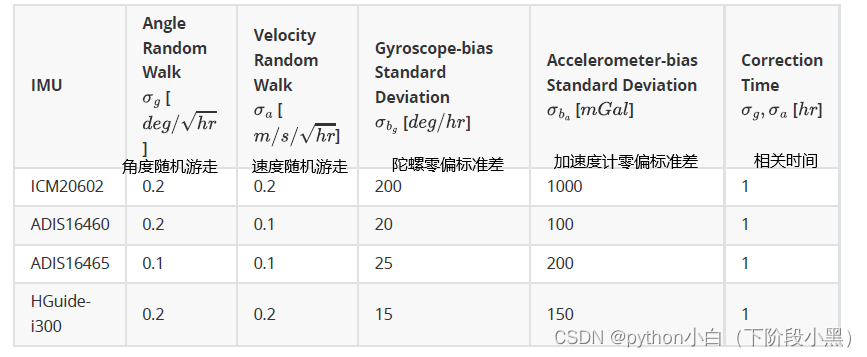
参考噪声参数
参考噪声参数如下:
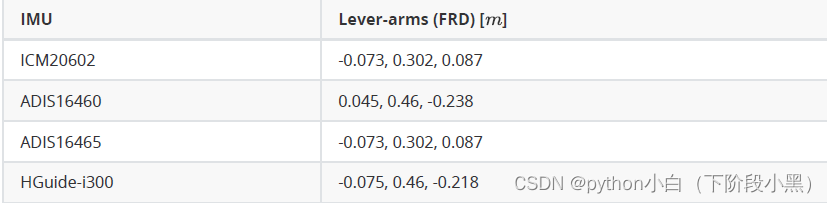
安装参数
IMU主体框架(b系)定义为前右下(FRD)坐标。GNSS大地定位采用WGS-84椭球模型定义。b系中GNSS天线杆臂如下:
文件格式描述
数据集包含IMU二进制文件、GNSS定位结果文本文件和地面真实点文本文件三种文件类型。
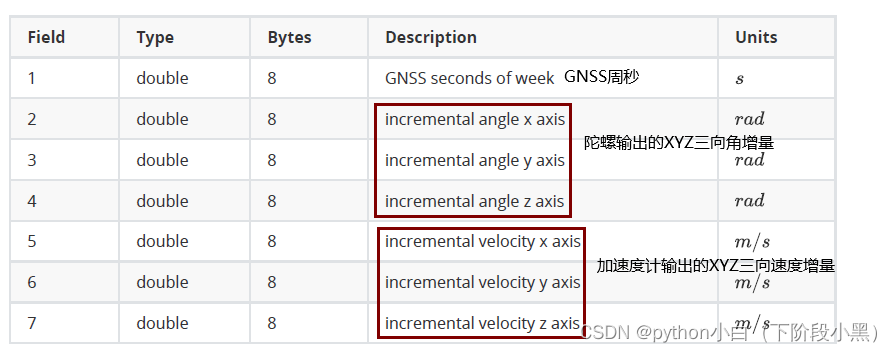
IMU二进制文件格式(.bin)定义为:
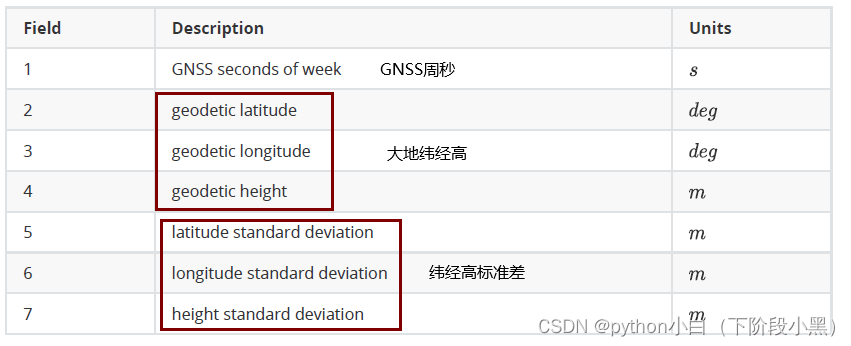
GNSS定位结果文本文件(.Pos, 7列)定义为:
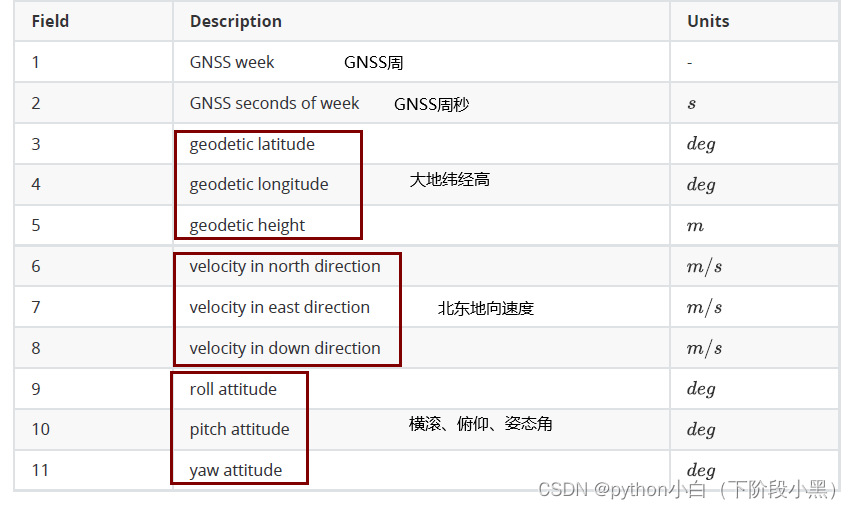
地面真值点文本文件(*.nav)定义为:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)