通过rostopic list 可以查看发布的话题,可以看到有/tag_detections和/tf话题,那麽我们先编写订阅/tag_detections,然后根据此模板订阅成/tf
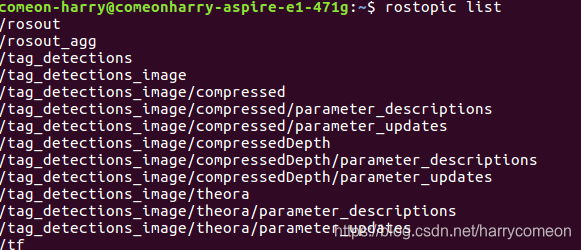
1,首先原始话题是订阅/tag_detections
通过rostopic info /tag_detections 查看话题的发布者和类型如下:

2,已知话题的发布者和类型,这时候我们编写订阅节点
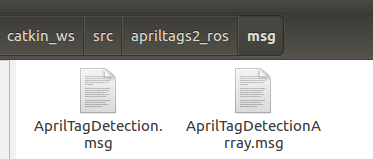
2.1,首先我们看到这里的类型后,我们要找到这个类型在msg文件/srv文件下,从而进行头文件定义,这里我们看到很明显的在msg文件下的AprilTagDetectionArray.msg文件下,msg消息和srv服务文件编译后都会变成程序的头文件,所以这里写成,来引入此话题类型
#include "apriltags2_ros/AprilTagDetectionArray.h"
2.2 编写订阅话题的类Localizer
这里的编写,我是根据之前看到话题一种类的格式来修改的,当然我们可以用官网上那种把所有部分都写在main函数的形式,但是那样不便于后来程序阅读和拓展,所以我选择这种形式,现在我们分析下下面的具体实现
对象声明:
ros::Subscriber ar_sub_;这句话定义了一个话题订阅对象ar_sub_
apriltags2_ros::AprilTagDetectionArrayConstPtr last_msg_;定义了一个 实参对象last_msg_
至于这里为什么加ConstPtr,这是一个疑问点,不懂,从下面网址看到:
另一个是::ConstPtr,它是boost::shared_ptr。通过将const指针传递到回调,我们避免了复制。网址:https://blog.csdn.net/kantswang/article/details/82947669
void number_callback(const apriltags2_ros::AprilTagDetectionArray::ConstPtr& msg)定义回调函数,里面是调用话题类型的形参对象,函数内实现了形参向实参的赋值。
ar_sub_ = nh.subscribe<apriltags2_ros::AprilTagDetectionArray>(“tag_detections”, 1,
&Localizer::number_callback, this);
<apriltags2_ros::AprilTagDetectionArray>订阅话题的类型
“tag_detections”,订阅的话题
1 缓存队列空间大小,通常订阅和发布缓存大小是一致。被取走的消息存放入了Subscriber的消息队列中,等待被Callback执行。如果Callback执行很慢,消息越堆越多,最老的消息会逐渐被顶替。参考网址:https://blog.csdn.net/handsome_for_kill/article/details/81984428
&Localizer::number_callback 回调函数的引用
this 不懂,固定格式,可能跟指针有关
main函数Localizer localizer(node_obj);对节点对象的实例化,从而实现订阅
ros::spin()函数一般不会出现在循环中,因为程序执行到spin()后就不调用其他语句了,也就是说该循环没有任何意义,还有就是spin()函数后面一定不能有其他语句(return 0 除外),有也是白搭,不会执行的。
下面是我们订阅/tag_detections的节点
#include "ros/ros.h"
#include "apriltags2_ros/AprilTagDetectionArray.h"
#include <iostream>
class Localizer
{
public:
Localizer(ros::NodeHandle& nh)
{
ar_sub_ = nh.subscribe<apriltags2_ros::AprilTagDetectionArray>("tf", 1,
&Localizer::number_callback, this);
}
void number_callback(const apriltags2_ros::AprilTagDetectionArray::ConstPtr& msg)
{
last_msg_ = msg;
ROS_INFO_STREAM(last_msg_->detections[0].pose.pose.pose);
}
ros::Subscriber ar_sub_;
apriltags2_ros::AprilTagDetectionArrayConstPtr last_msg_;
};
int main(int argc, char **argv)
{
int i=0;
ros::init(argc, argv,"apriltag_detector_subscriber");
ros::NodeHandle node_obj;
Localizer localizer(node_obj);
ROS_INFO("Vision node starting");
ros::spin();
}
根据上面订阅/tag_detections的节点,我编写了订阅/tf的话题节点,可以看到只是修改了相关的部分,这里只是应用还是有一定规律。这里我们可以试着任意想订阅的话题节点了
#include "ros/ros.h"
#include "tf2_msgs/TFMessage.h"
#include <iostream>
class Localizer
{
public:
Localizer(ros::NodeHandle& nh)
{
ar_sub_ = nh.subscribe<tf2_msgs::TFMessage>("tf", 1,
&Localizer::number_callback, this);
}
void number_callback(const tf2_msgs::TFMessage::ConstPtr& msg)
{
last_msg_ = msg;
ROS_INFO_STREAM(last_msg_->transforms[0].transform);
}
ros::Subscriber ar_sub_;
tf2_msgs::TFMessageConstPtr last_msg_;
};
int main(int argc, char **argv)
{
int i=0;
ros::init(argc, argv,"apriltag_detector_subscriber");
ros::NodeHandle node_obj;
Localizer localizer(node_obj);
ROS_INFO("Vision node starting");
ros::spin();
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)