本人菜鸟一枚,最近在学习Servlet,一时兴起,就想要写一下新建一个Servlet项目,看看能不能帮助到一些有需要的和我一样也是新手的人。
1、下载并打开IDEA
下载IDEA,官网链接:https://www.jetbrains.com/idea/
下载完后打开,第一次打开应该是类似下面的这个页面,点击“Create New Project”

2、创建新项目
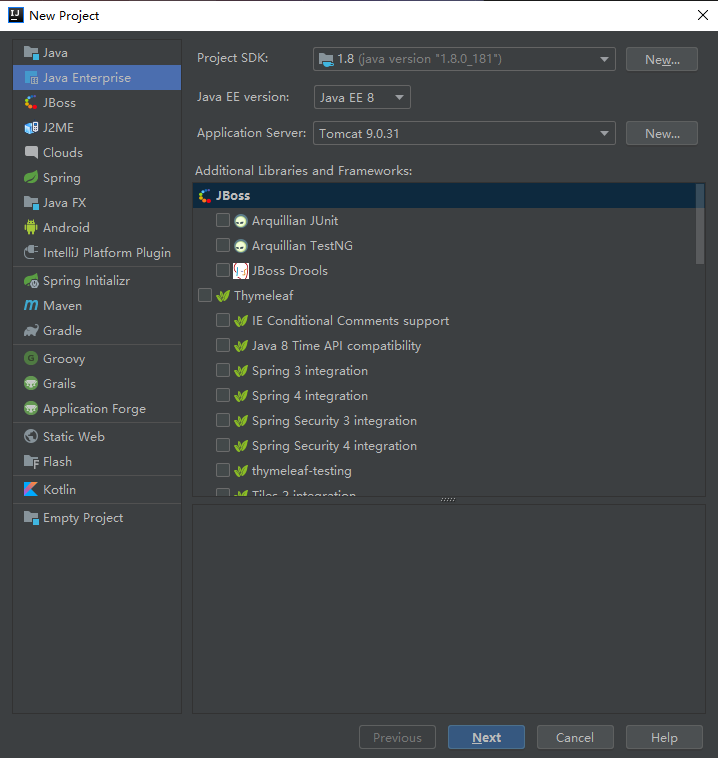
左边是可创建项目的类别,选择Java Enterprise
右边是配置,如果你已经安装了jdk的话,那么idea应该会自动检测到,第一次下载的时候,Application Server那个地方为空的,需要配置Tomcat,看下一步
3、下载并配置tomcat
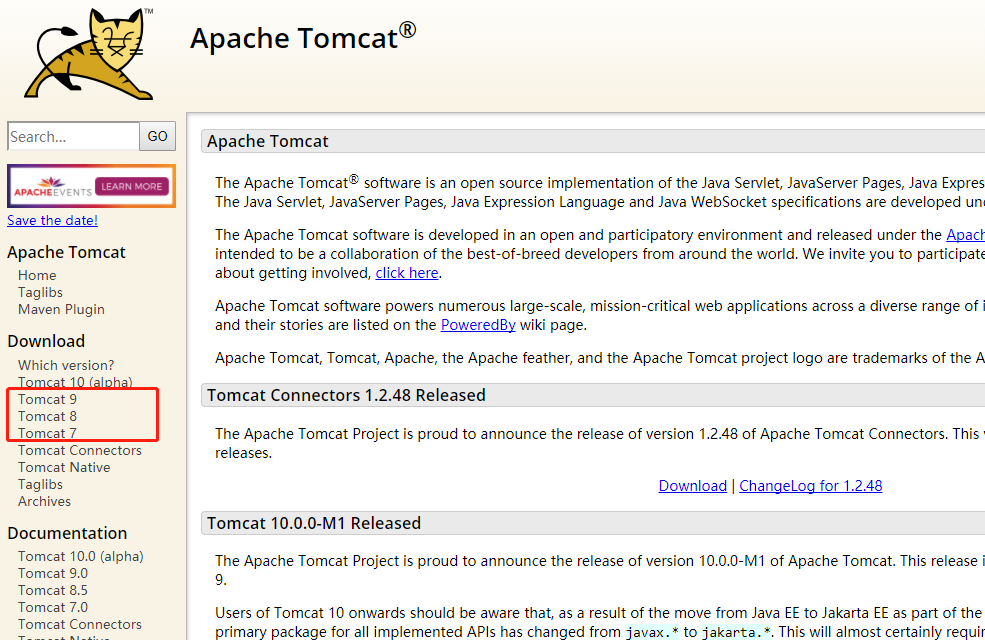
要配置tomcat,必须先下载tomcat
tomcat官网:http://tomcat.apache.org/
下载完后,将其解压放到一个你能照到的地方,等会要用到
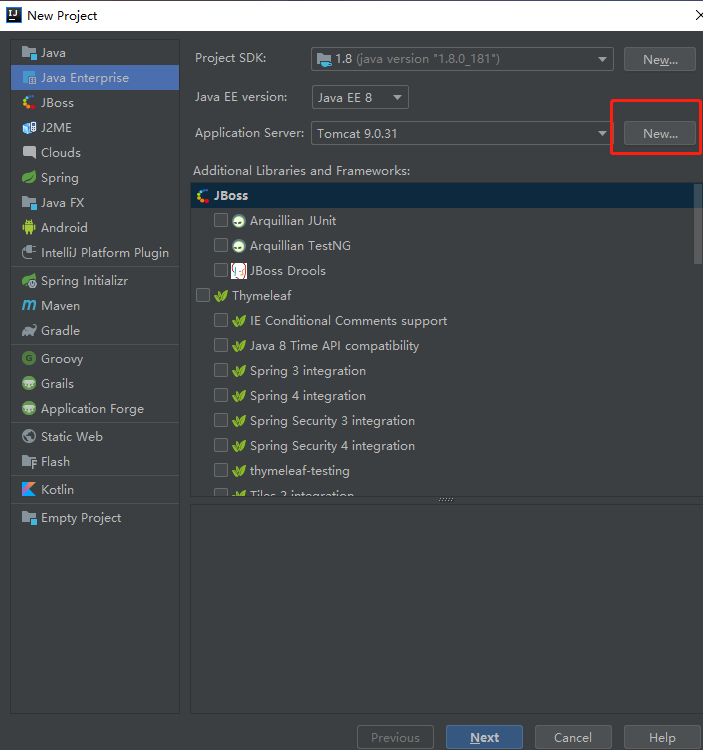
ok,现在回到idea,点击圈中的New按钮
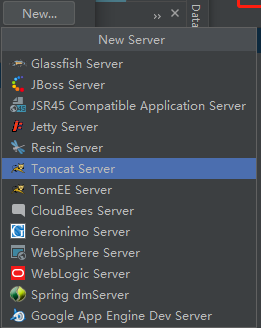
找到Tomcat Servlet选项并选中
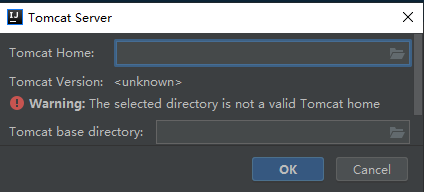
弹出对话框,找到并选中刚才下载的tomcat,然后就可以点击OK了
4、Addition Libraries and Frameworks配置
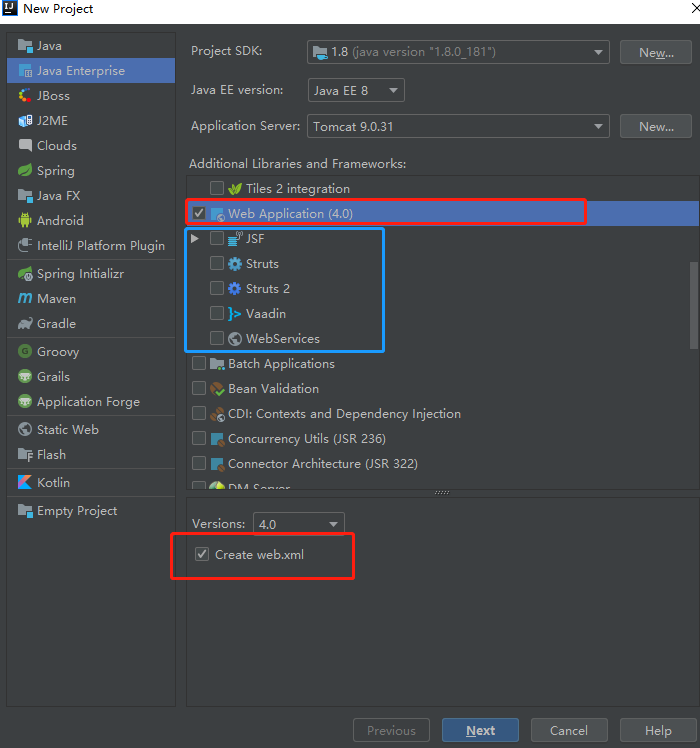
找到Web Application并选中,蓝色框的是框架,如果有需要就打勾,不需要就跳过,看到最下面的create web.xml,web.xml是一个部署描述文件,可以选定,这样子如果之后需要就可以不用重新创建了,然后就可以点击next按钮了。
5、填写项目名称及存放路径
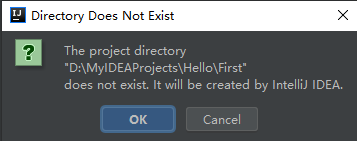
上面一个就是项目名称,下面就是存放路径(这个就不用我多说了,一目了然),然后就可以点击Finish按钮了,此时可能会弹出一个窗口询问你是否要为该项目创建新文件夹(如果你在Project Location写了一个不存在的路径,他会询问你是否要创建)

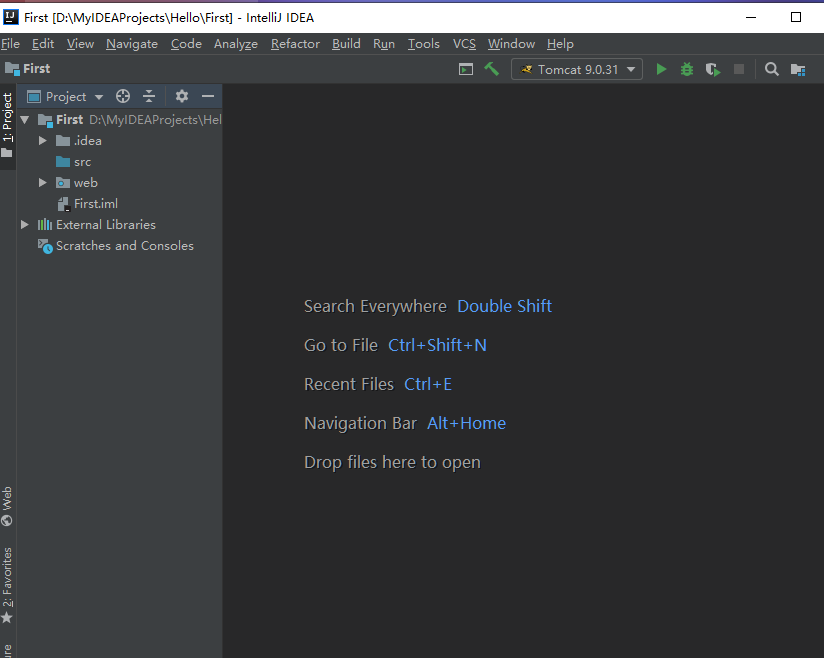
6、完成项目的创建
前面点击确认后就完成了项目的创建
不喜勿喷,希望能给有需要的人带来帮助,谢谢。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)