在学习XTDrone的二维路径规划时需要使用navigation功能包,使用文档安装方式为二进制安装。
sudo apt install -y ros-melodic-move-base \
ros-melodic-costmap-2d \
ros-melodic-dwa-local-planner \
ros-melodic-global-planner
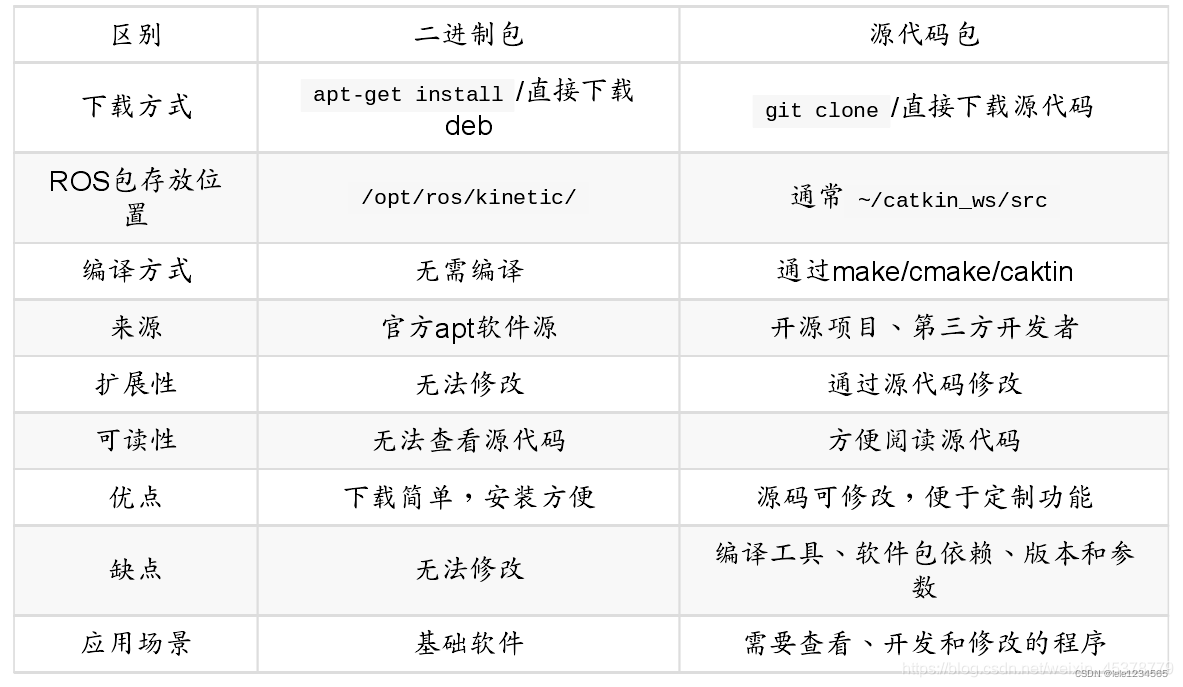
二进制包:里面包括了已经编译完成,可以直接运行的程序。这种方式简单快捷,适合比较固定、无需改动的程序。
查看是否是二进制安装,在终端输入
rospack find packagename
如果出现安装位置为opt/ros/…那么为二进制安装

而我在学习了示例的使用之后想要深入学习路径规划算法,并尝试自己编写路径规划算法进行仿真,所以我需要阅读功能包源码,源码包:是程序的原始代码,我们必须经过编译,生成了可执行的二进制文件后才能运行。
 首先我们需要卸载已经安装的二进制功能包。
首先我们需要卸载已经安装的二进制功能包。
sudo apt-get purge ros-melodic-move-base
sudo apt-get purge ros-melodic-costmap-2d
sudo apt-get purge ros-melodic-dwa-local-planner
sudo apt-get purge ros-melodic-global-planner
卸载依赖包
sudo apt-get autoremove
然后在工作空间下,下载功能包源码
cd catkin_ws/src
git clone https://github.com/源码包链接
同样可以先下载的代码压缩包后解压到src文件夹。
然后编译
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
编译时可能会遇到一些缺少依赖项的问题
cd ~/catkin_ws
//三选一,注意修改合适的ROS版本
rosdep install --from-paths src --ignore-src --rosdistro=melodic -y
rosdep install --from-paths src --ignore-src --rosdistro melodic
rosdep install --from-paths src --ignore-src --rosdistro melodic -r -y
查找包的位置
rospack find packagename
现在显示位置在catkin_ws/src 则源码安装完成。
 最后使用XTDrone的示例程序重新运行一下,验证是否安装有问题。我的运行后没有问题。
最后使用XTDrone的示例程序重新运行一下,验证是否安装有问题。我的运行后没有问题。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)