1Eigen在ROS中的配置:
在CMakeLists.txt中必须加上:
find_package(Eigen REQUIRED)
...
include_directories(
${catkin_INCLUDE_DIRS}
${Eigen_INCLUDE_DIRS}
)
由于ROS Indigo中出现的变化,需要依赖cmake_modules,因此可以在下面加入:
find_package(catkin REQUIRED COMPONENTS
cmake_modules
)
2当使用下面这种方式给矩阵赋值时,矩阵必须是一个确定的,否则会出错:
MatrixXd m;
m(0,0) = 3;
m(1,0) = 2.5;
m(0,1) = -1;
m(1,1) = m(1,0)+m(0,1);
std::cout << m << std::endl;
这里MatrixXd m的矩阵m没有制定大小尺寸,所以不行,会出现下面的错误:
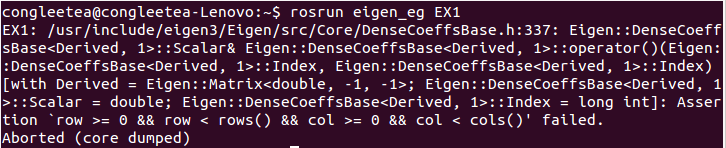
图一
所以,正确地应该定义为:
MatrixXd m(2,2);
但是,这样的必须每个值都赋,不能空余,否则出现下面的错误:
Assertion `(m_row+m_currentBlockRows) == m_xpr.rows() && m_col == m_xpr.cols() && “Too few coefficients passed to comma initializer (operator<<)”’ failed.
或者,使用一个类型确定的类型,比如:
Matrix3d m;
m << 1,2,3,
4,5,6,
7,8,9;
cout << m << endl;
这样,通过类型也可以确定m是3维矩阵.注意此时的赋值方式 << ,不能用等号赋值.
<<这种赋值也不能使用for循环一个一个值给:
for(int i=0;i<4;i++)
{
m << i;
}
这种赋值也是不行的.
另外对于
MatrixXd waypoints_;
VectorXd timepoints_;
这种维度不确定的向量和矩阵,可以在赋值前使用函数resize来制定维度,否则也会出现上面的错误。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)