目录:
- 前言:
- 实现原理:
- 实现步骤
- 1、开启hyper-v
- 2、编写桥接网络powershell脚本
- 3、编写网络配置脚本
- 实现结果
- 取消桥接
- 最后
前言:
在我们经常和机器人打交道的这群人中有一个需求,那就是希望我们的电脑主机能够和外部的机器人系统进行组网,比如:通过ROS组网通信,调试机器人等。但是,WSL2是在windows主机内部建立的虚拟局域网,其ip从外部无法访问。网上实现外网Ping通WSL的很多文章提到端口转发,但是ROS的文档里面要求用到所有的端口,所以采用端口转发不太实际。所以要想办法让WSL2的ip暴露出来,使得外部的主机能够访问到。
实现原理:
将wsl2自建的虚拟NAT网络桥接到windows主机网卡上
实现步骤
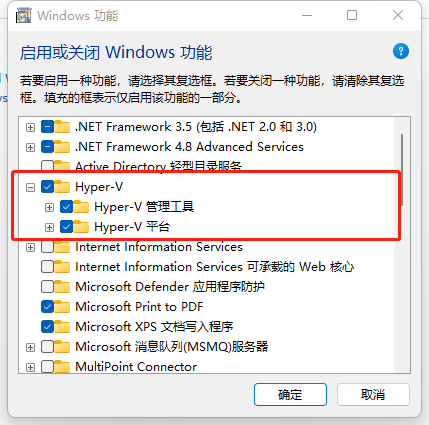
1、开启hyper-v
桥接功能需要windows的hyper-v组件支持。首先,进入控制面板—程序—启用或关闭windows功能,勾选hyper-v,确认后重启电脑。
2、编写桥接网络powershell脚本
在windows中新建一个ps1文件,例如network-on.ps1
$currentWi = [Security.Principal.WindowsIdentity]::GetCurrent()
$currentWp = [Security.Principal.WindowsPrincipal]$currentWi
if( -not $currentWp.IsInRole([Security.Principal.WindowsBuiltInRole]::Administrator))
{
$boundPara = ($MyInvocation.BoundParameters.Keys | foreach{'-{0} {1}' -f $_ ,$MyInvocation.BoundParameters[$_]} ) -join ' '
$currentFile = $MyInvocation.MyCommand.Definition
$fullPara = $boundPara + ' ' + $args -join ' '
Start-Process "$psHome\pwsh.exe" -ArgumentList "$currentFile $fullPara" -verb runas
return
}
echo "check the wsl whether it is running..."
wsl --cd ~ -e ls
echo "get network card infomation..."
Get-NetAdapter
echo "Bridging WSL network to Ethernet..."
Set-VMSwitch WSL -NetAdapterName 以太网
echo "`n Modifying WSL network configuration..."
wsl --cd ~ -e sh -c ./Programs/network.sh
echo "`ndone!!!"
pause
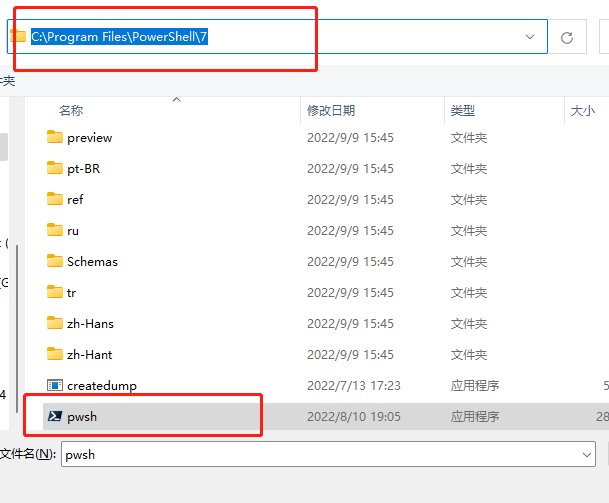
编写好powershell脚本之后,我们需要修改这个脚本的启动方式,以及赋予管理员权限启动这个脚本。在打开方式中选择其它应用,找到powershell安装路径下的可执行文件pwsh.exe,勾选始终使用此应用打开.ps1文件,这样就可以直接双击运行了。我这里的路径是在这个地方:
注意:默认情况下windows powershell不允许执行自定义脚本,所以需要修改设置打开执行权限。管理员方式打开powershell,执行Set-ExecutionPolicy Unrestricted 或 Set-ExecutionPolicy RemoteSigned ,按y确认即可

3、编写网络配置脚本
在实现网卡桥接之后,我们要进入wsl配置我们的网络(IP、子网掩码、网关等)。我这里是通过写入一个脚本来实现,进入wsl,在你的文件夹下面编写如下脚本
#!/bin/bash
new_ip=192.168.1.233
brd=192.168.1.255
gateway=192.168.1.1
nameserver=192.168.1.1
net_dev=eth0
# 注意,下面这里需要用到wsl的sud执行命令,所以需要填写你wsl的密码
echo "[your password]" | sudo -S ip addr del $(ip addr show $net_dev | grep 'inet\b' | awk '{print $2}' | head -n 1) dev $net_dev
sudo ip addr add $new_ip/24 broadcast $brd dev $net_dev
sudo ip route add 0.0.0.0/0 via $gateway dev $net_dev
sudo sed -i "\$c nameserver $nameserver" /etc/resolv.conf
注意:我这里的网关是 192.168.1.1,我把wsl的ip配置为 192.168.1.233 ,如果你的环境不同需要做相应的调整
实现结果
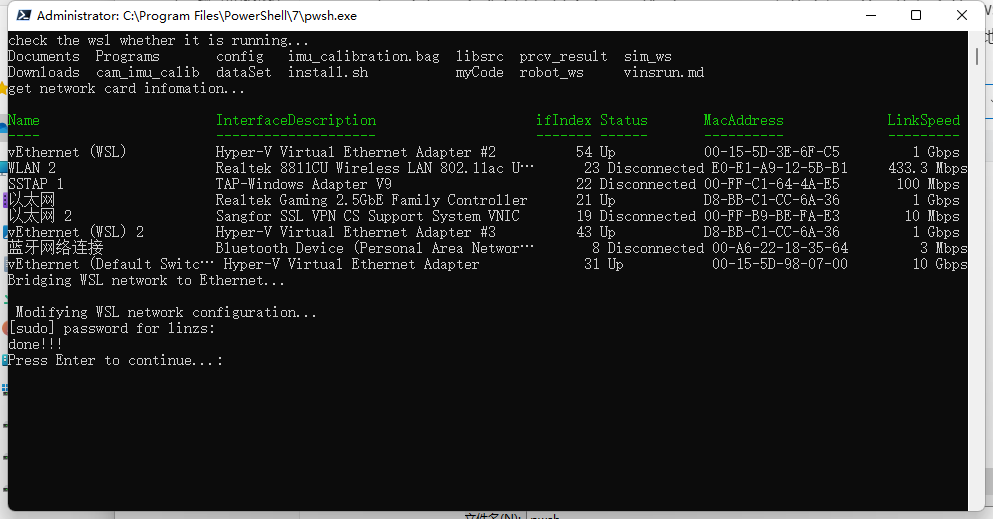
我们双击我们写的network-on.ps1运行脚本即可实现网络的桥接,下面是运行结果
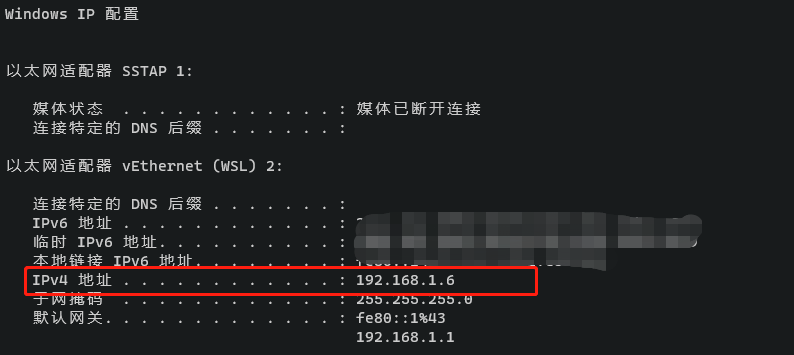
此时我们再到wsl中查看一下wsl的IP地址
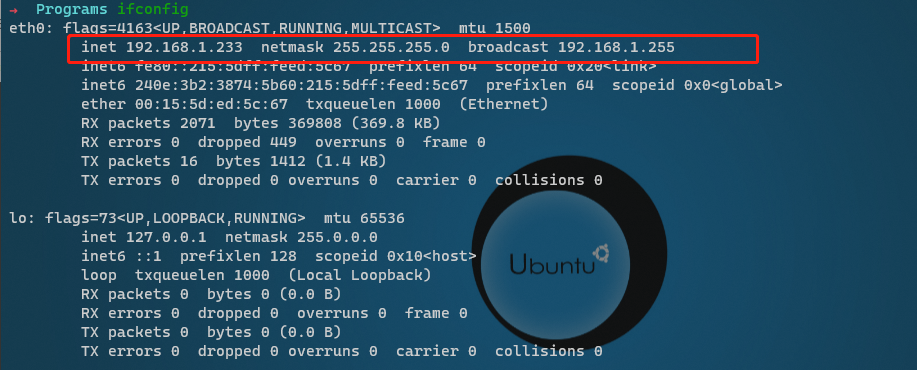
可以看到wsl的IP已经和我们Windows主机的ip在同一个网段上了,我这里window的ip是
我们在我们局域网里面的其他电脑ping一下我们的wsl看看是否可以ping通

可以看到我们已经实现了把wsl的ip暴露出来,并且可以在局域网中的其他主机进行访问,这样我们后面就可以配置ROS组网进行机器人的调试了。
取消桥接
注意:上面说的这种桥接方式在电脑重启之后这个配置会清除。另外,我们也可以通过写一个脚本实现桥接网络配置的一键清除,同样地编写一个ps1脚本,并且设置默认打开方式
$currentWi = [Security.Principal.WindowsIdentity]::GetCurrent()
$currentWp = [Security.Principal.WindowsPrincipal]$currentWi
if( -not $currentWp.IsInRole([Security.Principal.WindowsBuiltInRole]::Administrator))
{
$boundPara = ($MyInvocation.BoundParameters.Keys | foreach{'-{0} {1}' -f $_ ,$MyInvocation.BoundParameters[$_]} ) -join ' '
$currentFile = $MyInvocation.MyCommand.Definition
$fullPara = $boundPara + ' ' + $args -join ' '
Start-Process "$psHome\pwsh.exe" -ArgumentList "$currentFile $fullPara" -verb runas
return
}
echo "Unbridge Network..."
Set-VMSwitch WSL -SwitchType Internal
echo "reboot wsl..."
wsl --shutdown
wsl --cd ~ -e ls
echo "`ndone"
pause
最后
通过这两个脚本,每次我们可以很轻松实现wsl虚拟网卡和window网卡桥接的建立和取消
下一篇我们通过wsl和局域网中的小电脑进行ROS组网,实现一下远程调试!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)