rt-thread学习记录(一)–内核的移植
1、基本选择
在rt-thread官网上,看到其对stm32芯片的支持,因此选择stm32c8t6最小系统来进行移植内核,rt-thread选择github上面最新的项目进行移植。
rt-thread官网
rt-thread的github
2、开始移植
打开kei5软件,新建一个项目工程,选择芯片类型为stm32C8,如图所示:
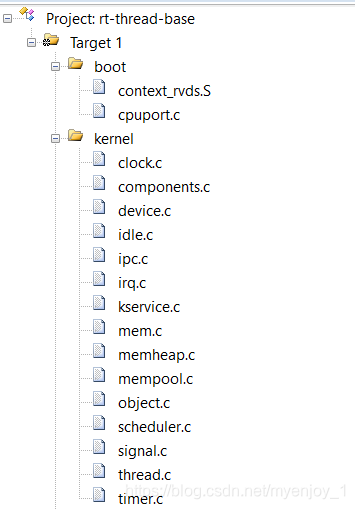
对项目进行包管理,点击target 1 -> manage project item 新建包
boot
kernel --> rt-thread内核源码
stm32_hal -->stm32的HAL库文件
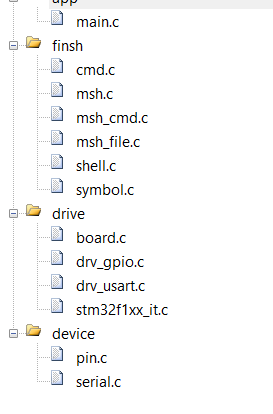
app -->应用程序
finsh --> rt-thread命令行包
drive --> rt-thread驱动文件
device -->rt-thread设备文件
为了简单起见,可以将官方的rtthread_simulator_v0.1.0文件拷贝过来,将rtthread_simulator_v0.1.0里面的文件复制在本项目文件里面。
将文件导入工程里面,如图所示:
添加项目,头文件,

添加全局define USE_HAL_DRIVER, RT_USING_ARM_LIBC
正常的话可以编译成功,烧录,运行
打开uart1即PA9,PA10连CH340的rx,tx.打开uart1,运行程序,此时出现rt-thread命令行,如图所示:
说明成功移植移植内核,在stm32c8t6最小系统上面
输入tab键查看命令,更多命令请查看rtthread finsh组件
到此rt-thread在stm32c8上面移植完成
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)