ROS常用知识点总结——安装虚拟机VMware
1、 下载VMware16安装包
链接: VMware16
提取码:1234 --来自百度网盘超级会员V5的分享
…
…
2、安装过程
(1)、双击下载好的文件
注意:双击打开时会遇到打开较慢的情况,不要着急,等一会儿就会加载出来。


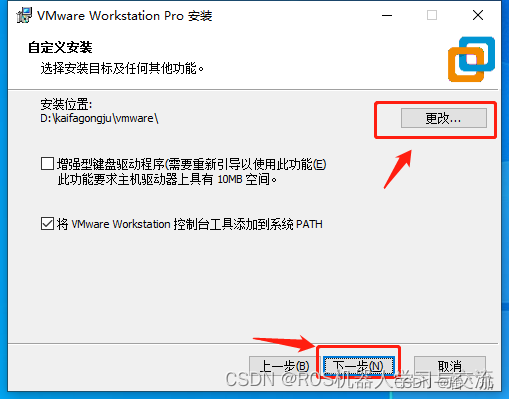
(2)、一路下一步即可,到了以下界面可以更改安装目录
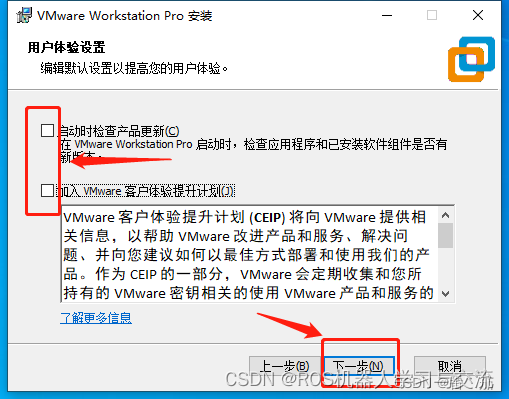
(3)、取消勾选,点击下一步
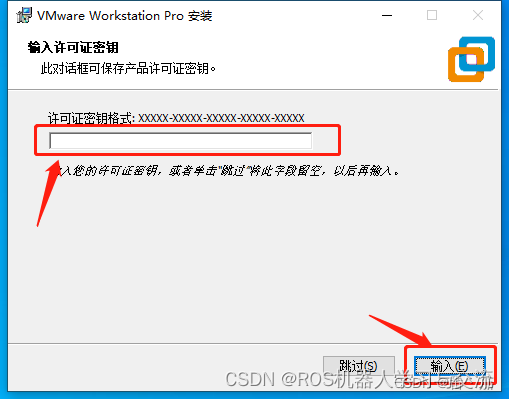
(4)、按照提示操作,到了密钥处,选择跳过,进行非商业使用即可
(5)、安装完成
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)