1.警告(其实是错误,但也要解决):

[WARN] [1682069601.434351, 0.000000]: Controller Spawner couldn't find the expected controller_manager ROS interface.
错误原因:应该是Gazebo的lib库有问题。
解决办法:卸载gazebo7,重装gazebo8(因为是kinetic版本,就装了8)。
查看gazebo版本:dpkg -l | grep gazebo
卸载gazebo7:sudo apt-get remove gazebo7 gazebo7-common gazebo7-plugin-base libgazebo7:amd64 libgazebo7-dev:amd64
安装gazebo8:sudo apt-get install gazebo8
安装依赖:sudo apt-get install libgazebo8-dev
安装gazebo-ros-conrtol:sudo apt-get install ros-kinetic-gazebo8-ros-pkgs ros-kinetic-gazebo8-ros-control
2.解决了上面的错误后,又出现了新的错误,说插件找不到,安装就行了
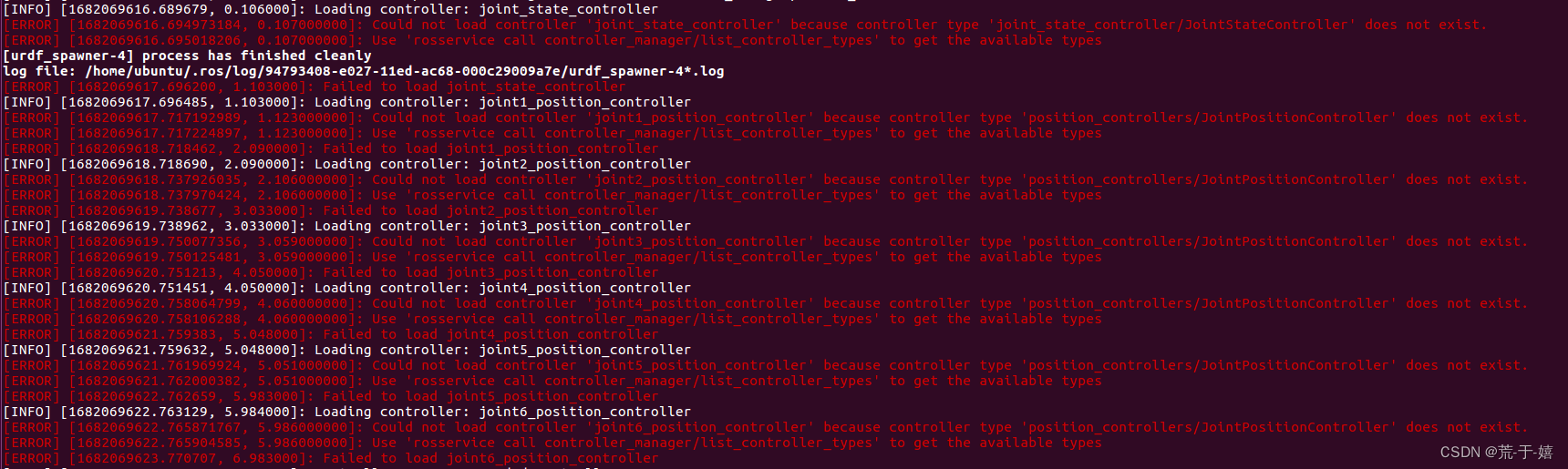
解决办法:
sudo apt-get install ros-kinetic-joint-state-controller
rospack profile
sudo apt-get install ros-kinetic-position-controllers
====================================================
接下来就好使了,运行我们的代码:
roslaunch marm_gazebo arm_gazebo_control.launch