平面用一个向量,和一个点
P
‘
P‘
P‘表示。若p点在面内,则
(
p
−
p
′
)
∗
N
=
0
(p-p')*N = 0
(p−p′)∗N=0。 将
P
=
O
+
t
D
P=O+tD
P=O+tD带入式中
⇒
\Rightarrow
⇒
一种更为简便的方法(Moller Trumbore算法)
将点在三角形内公式与直线方程直接联系得
求解:
解得
t
,
b
1
,
b
2
t,b_1,b_2
t,b1,b2,若t为正,b1>0,b2>0,b1+b2<1。则点在三角形内
计算:
原
式
⇒
t
∗
(
−
D
⃗
)
+
b
1
∗
(
P
1
⃗
−
P
0
⃗
)
+
b
2
∗
(
P
2
⃗
−
P
0
⃗
)
=
O
⃗
−
P
0
⃗
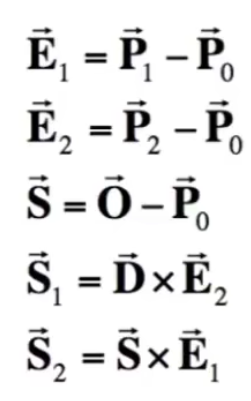
原式\Rightarrow t*(-\vec D) + b_1*(\vec {P_1} - \vec {P_0}) + b_2*(\vec {P_2} - \vec {P_0}) = \vec O - \vec {P_0}
原式⇒t∗(−D)+b1∗(P1−P0)+b2∗(P2−P0)=O−P0 将
E
1
,
E
2
,
S
E_1,E_2,S
E1,E2,S代入得
原
式
⇒
[
−
D
⃗
,
E
1
⃗
,
E
2
⃗
]
[
t
b
1
b
2
]
=
S
⃗
原式\Rightarrow \begin{bmatrix} -\vec D ,& \vec{E_1}, & \vec{E_2} \end{bmatrix} \begin{bmatrix} t \\ b_1 \\ b_2 \end{bmatrix}= \vec S
原式⇒[−D,E1,E2]⎣⎡tb1b2⎦⎤=S 之后应该是对
[
−
D
⃗
,
E
1
⃗
,
E
2
⃗
]
\begin{bmatrix} -\vec D ,& \vec{E_1}, & \vec{E_2} \end{bmatrix}
[−D,E1,E2]求逆,至于求逆后为什么会简化为上面的式子,我就不知道了!!
算法复杂度:
光线与表面求交加速方法
如果一条光线和每个三角形求交,那么太慢了,Cost = 光线数*三角形数*求交复杂度。
包围盒
使用包围盒(完全)包裹某个物体,如果光线和包围盒都没有交点,那么更不可能与包围盒内的三角形相交。
Axis-Aligned Bounding Box(轴对齐包围盒)
包围盒以x,y,z轴为法线定义。
判定光线和盒子求交
对于一条光线,
P
(
x
,
y
,
z
)
=
O
(
x
,
y
,
z
)
+
d
(
x
′
,
y
′
,
z
′
)
∗
t
;
P(x,y,z) = O(x,y,z)+d(x',y',z')*t;
P(x,y,z)=O(x,y,z)+d(x′,y′,z′)∗t; 定能求出
x
=
x
0
,
x
=
x
1
x=x_0,x=x_1
x=x0,x=x1时的
t
m
i
n
,
t
m
a
x
t_{min},t_{max}
tmin,tmax,y,z轴同理。(t可能为负)
求出x,y,z轴分别对应的
t
m
i
n
,
t
m
a
x
t_{min},t_{max}
tmin,tmax
求出三个
t
m
i
n
t_{min}
tmin的最大值
t
e
n
t
e
r
t_{enter}
tenter,三个
t
m
a
x
t_{max}
tmax的最小值
t
e
x
i
t
t_{exit}
texit。
如果
t
e
n
t
e
r
<
t
e
x
i
t
t_{enter} < t_{exit}
tenter<texit,则光线可能通过包围盒。
特别判断: 如果
t
e
x
i
t
<
0
t_{exit}<0
texit<0,物体在光线背后。无交点。 如果
t
e
x
i
t
>
0
,
t
e
n
t
e
r
<
0
t_{exit}>0,t_{enter}<0
texit>0,tenter<0,光线在盒子里面,一定有交点。 综上:当且仅当
t
e
n
t
e
r
<
t
e
x
i
t
&
&
t
e
x
i
t
>
0
t_{enter} < t_{exit} \&\& t_{exit}>0
tenter<texit&&texit>0 则一定有交点。